基于自适应逆控制的汽轮机调速系统研究
2014-07-10王万召
王万召, 王 杰
(1.河南城建学院 能源与建筑环境工程学院,平顶山467036;2.郑州大学 电气工程学院,郑州450001)
电站汽轮机调速系统是对汽轮机进行控制的主要系统,其动态性能直接影响机组的经济性和安全性.然而调速系统内的惯性、扰动、参数时变、死区和饱和等环节使得对象特性呈现出严重的非线性和时变性,常规PID控制系统难以取得理想的控制效果.为克服常规PID的不足,许多研究者尝试将智能控制方法引入PID控制,形成各种改进型PID调节系统,如模糊优化PID、神经网络PID、遗传算法PID等.在将上述改进型PID控制应用于汽轮机调速系统控制时,需要引入汽轮机功率信号作为负反馈信号,构成功率控制内回路,形成串级控制结构[1-3].然而,由于汽轮机功率信号难以测量,实际应用中常用发电机功率信号代替汽轮机功率信号,但是二者对控制系统动态特性的影响差异很大[4].笔者不再简单沿用发电机功率信号代替汽轮机功率信号构成负反馈的控制框架,而是将发电机功率作为负荷扰动信号引入汽轮机调速系统,同时考虑到调速系统非线性和参数时变的特点,提出一种基于自适应逆控制的汽轮机调速控制系统.
自适应逆控制是由美国斯坦福大学著名教授Widrow于1986年首次提出的,其基本思想就是要用一个来自控制器的信号去驱动对象,而该控制器的传递函数就是该对象本身传递函数的逆.与传统的反馈控制系统相比,自适应逆控制系统可以对对象给定信号的控制和对象扰动的控制分别进行自适应控制处理,使二者同时达到最优[5].近年来,自适应逆控制技术以其自身的诸多优点成为一个活跃的研究领域,现已成为一个全新的活跃分支[6-7].如何克服对被控对象精确模型解析式的依赖,实现在线辨识得到实际对象动态特性控制的逆控制器和对象扰动抑制的扰动消除控制器,是自适应逆控制方案走向实用的关键.
笔者首先利用径向基函数(Radial Basis Function,RBF)神经网络在线辨识获得汽轮机调速系统的逆模型,作为逆控制器构成自适应逆控制系统,实现动态特性的控制;然后利用RBF神经网络在线辨识获得一个自适应对象扰动消除器,实现对象扰动消除控制.最后,利用仿真实例验证该方案的可行性和有效性.
1 汽轮机调速对象特性分析
在工程实际中,由于汽轮机功率信号难以测量,而发电机功率信号容易测量.考虑到二者对系统动态特性的影响差别很大,笔者不再简单使用发电机功率信号代替汽轮机功率信号作为负反馈信号构成功率内回路.当把发电机信号作为负荷扰动信号处理时,汽轮机调速系统动态特性方框图如图1虚线框内所示.图1中对调速对象进行了简化处理,没有表示出各单元中的惯性、滞后和非线性特性,均采用简化的线性单元表示.相关参数意义如下:Ty为电液转换器时间常数;Tc为油动机时间常数;Tv为蒸汽容积时间常数;Tr为再热器时间常数;Ta为转子时间常数;Ch、Cm、Cd分别为高、中、低压缸传递函数的比例系数.
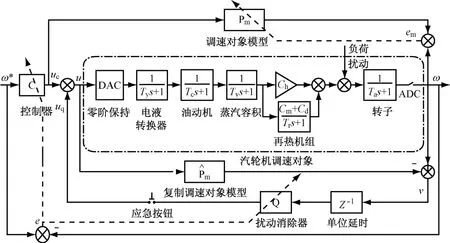
图1 汽轮机调速系统自适应逆控制结构图Fig.1 Block diagram of the turbine speed governing system based on adaptive inverse control
2 汽轮机调速系统自适应逆控制
自适应逆控制将被控对象的逆模型作为控制器,对被控对象的动态特性进行开环控制,使对象的输出跟踪给定信号变化.被控对象的逆模型(即自适应控制器)可利用自适应算法在线辨识获得,反馈仅在该逆控制器参数的自适应过程中采用,不参与系统动态特性的控制过程.由于跟踪给定信号控制中没有从输出到输入的反馈,就会让对象内部噪声和外部扰动毫无抑制地出现在对象的输出端,为此需要设计一个扰动消除控制器.由于汽轮机调速对象具有严重的非线性和参数时变性,为取得良好的控制效果,给定信号跟踪控制器和扰动消除控制器都需要采用在线辨识方法获得.因此,根据自适应逆控制的基本理论,提出汽轮机调速自适应逆控制系统结构(见图1).图1中,C为动态特性控制器(即对象逆模型);Q为扰动消除控制器;uc、uq分别为C和Q的输出;u为对象实际输入.
2.1 汽轮机调速对象模型的在线辨识
汽轮机调速对象是具有死区、惯性和参数时变的非线性对象,其差分方程可表示为

式中:u和y分别为汽轮机调速对象的控制输入信号和汽轮机输出转速;m和n分别为输入、输出对应阶次.
为实现汽轮机调速对象这种非线性时变对象模型的在线辨识,笔者选用RBF神经网络作为辨识工具.RBF神经网络[8]是一种局部逼近网络,已证明它能以任意精度逼近任意连续函数,多输入单输出RBF神经网络结构见图2.

图2 多输入单输出RBF神经网络结构Fig.2 Structure of the multi-input single-output RBF neural network
图2中,hj为高斯基函数,即

关于RBF神经网络更详细的描述可参考文献[8],此处不再赘述.
根据图1中对汽轮机调速对象模型Pm辨识结构的要求,可确定RBF神经网络1的输入层为

该模型辨识RBF神经网络1输出层的输出为ym(k+1).取辨识指标为
根据梯度下降法,权值的修正公式如下:

由于RBF神经网络输入向量的第一个分量为u(k),可得汽轮机调速对象的Jacobian信息为
式中:η(1)为 RBF 神 经 网 络 1 的 学 习 速 率;α(1)为RBF神经网络1的动量因子.
代表对象输出对输入灵敏度的Jacobian信息将在随后自适应逆控制器和扰动消除控制器的在线辨识算法中用到.
2.2 汽轮机调速对象逆模型的在线辨识
汽轮机调速对象在满足可逆的条件下,其对应逆模型的差分方程可表示为

根据图1自适应逆控制器(即对象逆模型)学习算法的任务要求,RBF神经网络2的输入层为

其中r(k+1)表示下一时刻的转速指令信号.RBF神经网络2的输出层的输出为uc(k).取辨识指标为

同理可得权值的修正公式如下
式中:η(2)为 RBF 神 经 网 络2 的 学 习 速 率;α(2)为RBF神经网络2的动量因子.
2.3 调速系统扰动消除控制器的在线辨识
汽轮机调速系统完成对象扰动消除是这样进行的:控制信号u同时作用到复制的对象模型(非常接近无扰动的对象)和对象P,对两者的输出求差可以将扰动信号引起的效果(即等效扰动v)分离出来,然后针对等效扰动v在线构建自适应的扰动消除控制器,来消除该扰动作用.考虑到数字反馈链路在环绕每一个回路上都必须至少有一个单位的延时,所以在扰动消除控制器Q前布置一个单位延时环节.于是,扰动消除控制器所对应的差分方程可表示为

采用RBF神经网络3来在线辨识获得扰动消除控制器.RBF神经网络3的输入层为

取性能指标为
则有
利用对象的Jacobian信息,采用梯度下降法,可得RBF神经网络3的权值修正公式如下
式中:η(3)为 RBF 神 经 网 络 3 的 学 习 速 率;α(3)为RBF神经网络3的动量因子.
考虑到等效扰动v的分离过程,要求在闭合扰动消除回路前确保对象模型收敛并接近对象P,此时调速对象输出和模型输出的差值em接近0.在系统运行中,当该条件被破坏时,必须利用应急按钮切除扰动消除器,直到满足该条件,才能再次投运扰动消除控制器.
3 仿真实验及分析
为验证所提出的汽轮机调速系统自适应逆控制策略的有效性和可靠性,对文献[9]中东北电网某电厂200MW机组汽轮机调速系统进行仿真研究.调速系统对象参数取如下典型值:Ty=0.01s,Tc=0.084s,Tv=0.345 5s,Ta=8s,Tr=8s,Ch=1,Cm=0.5,Cd=0.5,采样时间Ts取2s.
3.1 汽轮机转速指令跟踪工况仿真
为检验控制系统输出跟踪转速指令信号的性能,在转速指令信号输入端加入阶跃信号,考察系统输出跟踪给定转速信号的快速性和准确性.为进行比较,对处于文献[9]典型参数值下的调速对象同时进行传统PID控制仿真,PID控制器参数也取文献[9]中推荐的值,即kp=0.23,ki=0.5,kd=0.1.转速指令阶跃变化时系统的输出响应仿真结果见图3.由图3可以看出,传统的PID控制调节时间长、超调量大、振荡大;而笔者提出的自适应逆控制方案可以在汽轮机转速指令信号阶跃变化时实现快速、精确跟踪,稳定性好、无超调、调节时间短、控制品质良好.自适应逆控制方案中汽轮机调速对象逆模型辨识器RBF神经网络2的学习速率取0.02,动量因子取0.01,调速对象模型辨识器RBF神经网络1的学习速率取0.1,动量因子取0.01.图4给出了汽轮机调速对象在该工况下的Jacobian信息辨识结果,显示了对象辨识器RBF神经网络1在线实时学习调速对象动态特性的过程.
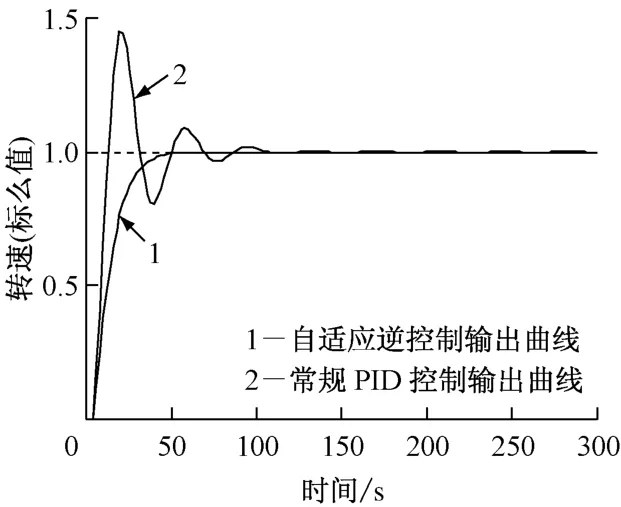
图3 转速指令阶跃变化时系统的输出响应Fig.3 System output response to step change of rotating speed instruction
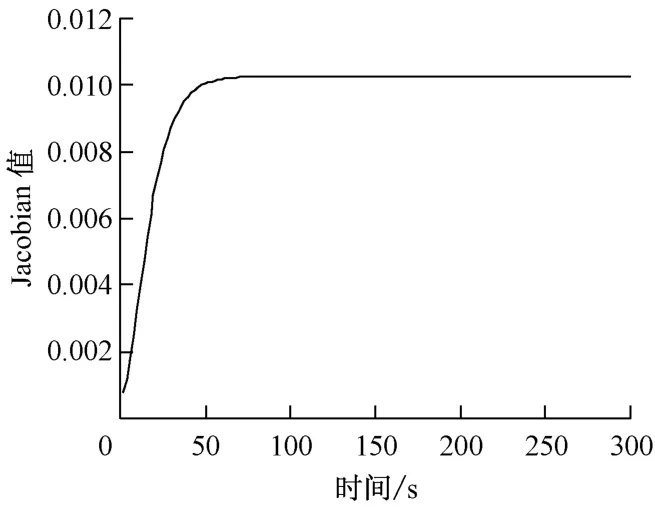
图4 汽轮机调速控制系统Jacobian信息辨识结果Fig.4 Jacobian information identification for the turbine speed governing system
3.2 汽轮机扰动消除工况仿真
为检验自适应扰动消除控制器对扰动信号的抑制效果,在实施转速指令控制的自适应逆控制器稳定工作后,对系统施加图5所示的方波形式的负荷扰动信号,分别对扰动消除控制器未投入和投入工况进行仿真实验,结果示于图6和图7.对比图6和图7可知,在系统面临外部(或负荷)扰动时,除扰动信号刚加入时由于扰动消除控制器需进行自适应学习过程,使得扰动效果幅度稍大之外,在随后的过程中,扰动效果的持续时间都大幅缩短,显示出良好的扰动抑制效果.其中,扰动消除控制器RBF神经网络3的学习速率取0.05,动量因子取0.1.
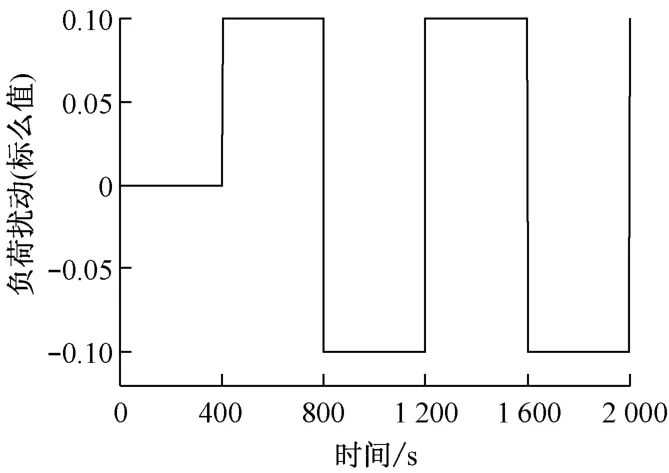
图5 外部负荷扰动信号Fig.5 External load disturbance signal
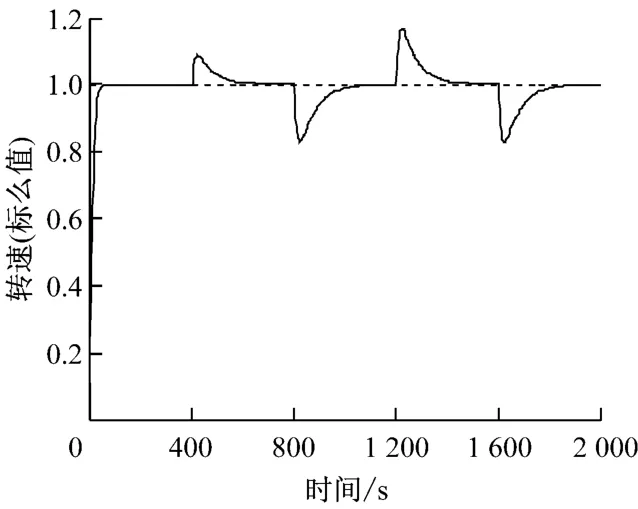
图6 扰动消除控制器未投运时系统输出响应Fig.6 System output response without disturbance canceller
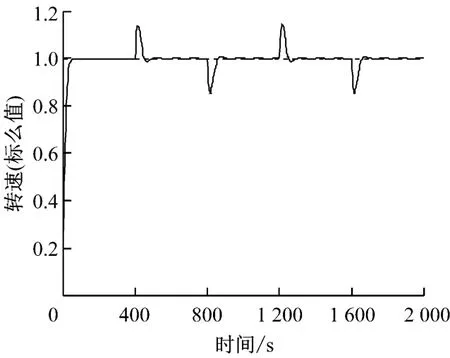
图7 扰动消除控制器投运时系统输出响应Fig.7 System output response with disturbance canceller
4 结 论
基于自适应逆控制的基本思想,提出一种汽轮机调速系统自适应逆控制算法,将该算法应用于某200MW机组汽轮机调速系统并进行仿真实验,结果表明:与PID汽轮机调速控制方案相比,所提出的汽轮机调速系统自适应逆控制算法不仅能够很好地跟踪速度指令,而且能够有效抑制扰动响应,控制品质优良,具有很强的鲁棒性.笔者所提出的算法具有一般性,为大惯性、参数时变、外扰大、难于精确建模的非线性对象的控制提供了一种新的解决方案.
[1]王爽心,王印松,朱衡君.汽轮机调速系统模糊控制的研究[J].系统仿真学报,2005,17(9):2196-2198.WANG Shuangxin,WANG Yinsong,ZHU Hengjun.Research on fuzzy control of turbine regulating system[J].Journal of System Simulation,2005,17(9):2196-2198.
[2]范鑫,秦建明,李明,等.超临界600MW汽轮机运行方式的优化研究[J].动力工程学报,2012,32(5):356-361.FAN Xin,QIN Jianming,LI Ming,et al.Study on operation mode optimization for a 600MW supercritical steam turbine[J].Journal of Chinese Society of Power Engineering,2012,32(5):356-361.
[3]王爽心,姜妍,李亚光.基于混合混沌优化策略的汽轮机调速系统模糊免疫PID控制 [J].中国电机工程学报,2006,26(11):70-74.WANG Shuangxin,JIANG Yan,LI Yaguang.Fuzzyimmune-PID control of the turbine governing system based on compound chaos optimization strategy [J].Proceedings of the CSEE,2006,26(11):70-74.
[4]王爽心,葛晓霞.汽轮机数字电液控制系统 [M].北京:中国电力出版社,2004.
[5]WIDROW B,WALACH E.Adaptive inverse control[M].New Jersey:Prentice Hall,1996.
[6]曲永印,白晶,周振雄,等.自适应逆控制的异步电机变频调速系统研究[J].控制与决策,2007,22(7):821-824.QU Yongyin,BAI Jing,ZHOU Zhenxiong,et al.A-daptive inverse control variable frequency speed regulation of asynchronous motor[J].Control and Decision,2007,22(7):821-824.
[7]WIDROW B,PLETT G L,FERREIRA E.Adaptive inverse control based on nonlinear adaptive filtering[C]//Proc.5th IFAC Workshop Algorithms Architectures for Real-Time Control.Cancun,Mexico:International Federation of Automatic Control by Pergamon,1998:247-252.
[8]刘金琨.智能控制[M].北京:电子工业出版社,2005.
[9]王志群,朱守真,楼鸿祥,等.基于时域分段线性多项式法的大型汽轮机建模和参数辨识[J].中国电机工程学报,2003,23(4):128-133.WANG Zhiqun,ZHU Shouzhen,LOU Hongxiang,et al.PLPF based modeling and parameter-identifying of large system turbine in time domain[J].Proceedings of the CSEE,2003,23(4):128-133.
