基于双轮式电机再生制动车辆稳定性集成控制研究*
2014-07-08陈庆樟许广举孟杰焦洪宇
陈庆樟许广举孟杰焦洪宇
(1.常熟理工学院;2.江苏大学江苏省汽车重点工程实验室)
基于双轮式电机再生制动车辆稳定性集成控制研究*
陈庆樟1,2许广举1孟杰1焦洪宇1
(1.常熟理工学院;2.江苏大学江苏省汽车重点工程实验室)
以双轮式电机前驱电动汽车制动系统为研究对象,把双电机再生制动、液压制动、稳定性控制集成在一起,开发了再生制动系统协调控制器。根据车辆制动需求、车辆状态、系统储能状态等确定车辆制动模式及分配制动力矩,并根据车辆实时稳定性状况由双轮式电机再生制动提供车辆稳定性控制力矩。仿真和试验结果表明,在车辆转弯制动工况中采用所述集成协调控制器比采用电机单边独立控制稳定性控制效果更好。
混合动力汽车和电动汽车中电机制动响应快、可实现能量回收制动,但可提供的制动力矩较小,其制动力矩控制受车轮转速、电机基速、储能系统充电能力等因素影响,往往难以单独承担车辆制动任务,需要与传统液压制动联合工作,作为液压制动的补充。本文以基于双轮式电机前驱动电动汽车为研究对象,开发再生制动及其稳定性集成控制系统。
1 系统结构
再生制动系统模型结构原理如图1所示,制动系统中的液压防抱死制动系统制动与再生制动协调控制,制动电机也进行防抱死制动控制。制动控制器根据制动需求,对液压防抱死制动系统电动泵、压力调节装置调整常规液压制动力大小,同时把按前、后轮制动力分配要求及制动工况要求等条件计算出来的电机制动力矩大小及车辆滑移率状态等信息输送给电机控制器,电机控制器对两个开关磁阻电机制动功率、制动扭矩进行调整控制,实现电机制动。储能器由阀控铅酸蓄电池及超级电容组合而成,以保证储能器既有较高的能量密度又有较高的功率密度,超级电容起能量缓冲作用,可更充分回收与利用制动能量。
2 集成控制策略
再生制动控制策略的原则是追求制动稳定性、驾驶员制动感觉和能量回收最大化。在制动踏板动作时(驾驶员有制动需求),根据制动需求大小,决定采用何种机电制动模式,再确定前、后制动力分配比,然后根据前轴制动需求量及储能系统荷电状况进行机电制动力分配,并进行能量回收;前轴电机制动进行液压防抱死制动系统控制,控制方式是对电机输入一个驱动电压,后轴制动仍为原有的液压防抱死制动系统制动方式;在紧急制动中前、后轴全为液压液压防抱死制动系统制动;机电制动比变化时制动踏板平稳过渡控制;根据集成系统输入状况确定能量回收最大化控制方法。
再生制动及稳定性集成控制策略原理如图2所示。
图2 中,协调控制器在获取车辆运行工况及运动状态后,根据所得的β、γ˙、vx、vy等参数进行车辆稳定性控制,输出预期的横摆力矩M^Z以调整车辆运动状态;电机控制器对前轮左、右电机进行制动控制产生相应的调整力矩。在制动过程中,制动踏板单元把制动需要的力Fbn输送给协调控制器,协调控制器根据制动强度判断电机与储能器SOC状态确定可用的再生制动最大力矩确定相应的制动模式,再由车辆质心参数状况确定出符合最佳前后轴制动力分配系数、控制高速开关阀的输入Df、Dr,从而调整前、后制动力分配;同时确定出液压制动系统承担的制动量电机控制器及液压液压防抱死制动系统模糊控制器再根据车速及车轮滑移率λ值进行液压防抱死制动系统控制。
整个系统以协调控制器为中心,车辆稳定性控制、再生制动控制、能量回收控制及液压制动控制相互关联制约。
协调控制器主控流程如图3所示。
式中,A是车辆稳定性因素,取A=0.005。侧滑角参考值为零,即:
基于电机再生制动的车辆稳定性控制算法如图4所示,图4中参考模型产生的横摆角速度与侧滑角参考值由驾驶员转向输入δf及纵向车速vx决定,两个参考值都是车辆稳定的控制目标。横摆角速度为:
为了获得预期的车辆响应,控制目标是车辆横摆角速度和侧滑角响应值与预期值(参考值)之间的误差最小,即控制算法输入是:
公式(3)中两个输入变量由车辆上产生的横摆力矩MZ与转向增益Δδ控制实现,即控制系统的两个输出为MZ、Δδ。
车辆横摆运动可以由左、右两边车轮制动力不同产生,本文中前轮由两个开关磁阻电机制动,控制两个电机制动强度可产生相应的横摆力矩MZ。若横摆运动为负方向(顺时针),则左前轮上的制动力增大;若横摆运动为正方向(逆时针),则右前轮上的制动力增大。而Δδ则叠加在驾驶员转向操纵上。设两个电机制动传动效率η1=η2=ηe,传动比ig1=ig2=ige,左、右车轮有效半径Rw1=Rw2=Rw,后轮左、右车轮的制动力相等,则有:
由上式可知,要提供MZ来平衡车辆横摆运动,则需控制左、右电机提供相应制动力矩差,控制能量回收相电流差为:
对于式(6),在横摆运动为顺时针时,iz为正;横摆运动为逆时针时,iz为负。当由发动机单独驱动时,相应电机控制发电电流即为模糊控制器采用Mamdani模糊推理方法确立模糊规则。
3 仿真与结果分析
在Matlab/simulink环境中对集成控制系统进行仿真研究,仿真时模拟转弯制动工况,假定车辆初始车速为60 km/h,在时间t=0.5 s时输入90°角转向阶跃,制动时间为4.5 s,由超级电容单独储能,初始SOC设为30%。图5为系统集成控制与双电机单边单独控制时的仿真结果比较曲线。
从图5所示仿真结果可以看出,在转弯制动工况下,采用集成控制时横向加速度、横摆角速度、车轮滑移率、制动距离等制动性能都有一定程度的改善,因此采用集成控制器形式有利于充分利用双轮式电机制动响应快的特点,提高汽车转弯制动稳定性能和车辆行驶稳定性能。但能量回收方面区别不大,主要是因为集成控制与单边单独控制两者在稳定性控制中制动力矩作用基本一致。
4 硬件在环试验
图6所示为所设计的汽车再生制动仿真硬件系统框图,负载电机工作,动力通过机械式变速器模拟车辆换挡变速、传递到电磁离合器、经过一个四向齿轮转向器把动力传递到惯性飞轮组,带动飞轮旋转,产生大小为汽车制动开始时动能值的机械能值。试验台包括制动踏板输入模块、制动能量转换模块、惯性模块、道路阻力模拟模块(负载电机)、常规制动模块、能量储存模块、测控系统模块等。表1所示为硬件在环仿真试验结果指标比较。
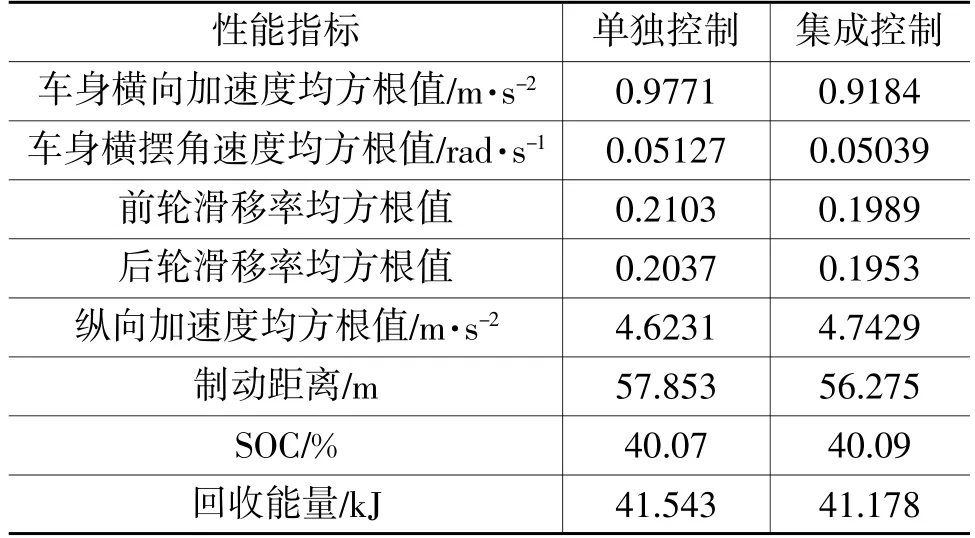
表1 硬件在环仿真试验结果指标比较
从表1中可以看出,在硬件在环仿真试验中,集成控制方式时车身横向加速度均方根值、车身横摆角速度均方根值、前轮滑移率均方根值、后轮滑移率均方根值、制动距离等均有较明显的改善,而能量回收性能由于在集成稳定性控制和单边单独控制中均由再生制动提供稳定性控制力矩,能量回收率基本没有变化,这与Simulink环境中仿真结果基本吻合。
5 结束语
将汽车电机能量再生制动、液压制动与车辆稳定性控制功能集成在一起,由协调控制器根据制动需求、车辆状态、系统储能状态等确定车辆制动模式、分配制动力矩,并根据车辆实时稳定性状况由双轮式电机再生制动提供车辆稳定性控制力矩,这种电动汽车或混合动力汽车集成制动系统具有制动响应快、制动稳定性更高的特点,并能实现制动能量回收及车辆行驶稳定性控制。集成系统协调控制器的制动稳定性优化及能量回收最大化优化是相关课题深入研究的关键。
1刘志强,过学迅.纯电动汽车电液复合再生制动控制.中南大学学报(自然科学版),2011,42(9):2687~2691.
2初亮.混合动力总成的控制算法和参数匹配研究:[学位论文].长春:吉林大学,2002.
3Jorge Moreno,Micah E.Ortuzar,Juan W.Dixon,Energy-ManagementSystemforaHybridElectricVehicle,Using Ultracapacitors and Neural Networks,IEEE Transactions on industrial Electronics,Vol.53,2008,pp614~623.
4Steven M.Demers.Mechanical and regenerative braking integration for a hybrid electric vehicle.Canada:Univ.of Waterloo,2009.
5A.M.Walker,M.U.Lamperth,S.Wilkins.On Friction Braking Demand with Regenerative Braking,SAE paper,2002-01-2581.
6J.K.Ahn,K.H.Jung,and D.H.Kim.Analysis of A Regenerative Braking System For Hybrid Electric Vehicles Using An Electro-Mechanical Brake.International Journal of Automotive Technology,2009,Vol.10,No.2,pp.229-234.
7彭栋.混合动力汽车制动能量回收与ABS集成控制研究:[学位论文].上海:上海交通大学,2007.
8赵伟.汽车动力学稳定性横摆力矩和主动转向联合控制策略的仿真研究:[学位论文].西安:长安大学,2008.
(责任编辑帘青)
修改稿收到日期为2014年2月1日。
Study on the Integrated Control for Vehicle Stability Based on Two-wheeled Motor Regenerative Braking System
Chen Qingzhang1,2,Xu Guangju1,Meng Jie1,Jiao Hongyu1
(1.Changshu Institute of Technology;2.Jiangsu Province key Laboratory of Automotive Engineering,Jiangsu University)
Taking two-wheeled motor front drive electric vehicle regenerative braking system as the research object,the regenerative braking system coordinated controller was developed by integrating the dual-motor regenerative braking,hydraulic brake and the stability system.The vehicle braking mode and the allocation of braking torque were determined according to the vehicle's braking demand,vehicle status and energy storage system state,and the stability control torque was provided by the two-wheeled motor regenerative braking system according to the real-time vehicle stability condition. The results show that,compared with the motor unilateral independent control strategy,the integrated coordinated controller has better stability effect on vehicle braking in the process of turning.
Electric vehicle,Regenerative braking,Vehicle stability,Integrated control
电动汽车再生制动车辆稳定性集成控制
U461.6
A
1000-3703(2014)07-0044-04
江苏省自然科学基金项目(BK2011367)和江苏省“六大人才高峰”项目(SZ2010002)资助。