永磁同步风电机控制系统PI调节器参数设计
2014-07-07赵峰李鹏飞
赵峰,李鹏飞
(兰州交通大学自动化与电气工程学院,甘肃 兰州 730070)
永磁同步风电机控制系统PI调节器参数设计
赵峰,李鹏飞
(兰州交通大学自动化与电气工程学院,甘肃 兰州 730070)
分析了永磁风力发电机控制系统拓扑结构,对系统的控制结构进行局部改良,区分了PI调节器参数的类型,从而简化了PI调节器参数设计的过程,减少了参数的计算数量。在网侧逆变器PI调节器参数设计的过程中改良了求导流程,并参考其设计过程创建了机侧整流器的PI调节器参数的求导流程。在Matlab中建立了永磁直驱风电系统的仿真模型并代入参数进行了动态仿真。仿真结果表明:设计出的PI调节器参数满足永磁风力发电机运行时的多项要求,可使永磁风力发电机平稳运行,表明建立的系统仿真模型和提出的参数设计流程的正确性。
永磁同步发电机;变流器;双闭环控制;PI调节器;参数设计
随着科技的发展,直驱式永磁同步风力发电机(permanent magnetsynchronousgenerator,PMSG)制造技术日趋成熟,制造费用逐渐下降。PMSG主要控制部分是背靠背式双PWM变流器,可以分为机侧整流器和网侧逆变器。前者实现对发电机功率、转速的控制,后者稳定直流母线电压和控制网侧功率因数[1]。通过对这两个变流器的控制可以调节整个永磁风电系统的状态。在工业上,最常用的控制方法就是运用PI调节器。通过对PI调节器参数的调整,可以实现PMSG系统的稳定运行。但PI调节器参数的选取大多数情况下要依靠经验,往往不能得到最好的控制性能[2]。由于PMSG控制系统采用多个PI调节器,而调整顺序和赋值大小都会影响系统的最终稳定性,这为系统的PI调节制造了障碍。本文就此问题进行深入研究,建立了PI调节器参数求导的基本流程,改良了网侧逆变器PI调节器参数求导公式,并在此基础上创建了机侧整流器的PI调节器参数求导流程和公式,最后利用Matlab进行仿真,验证其正确性。
1 PMSG工作原理和变流器数学模型
PMSG系统的拓扑结构如图1所示。
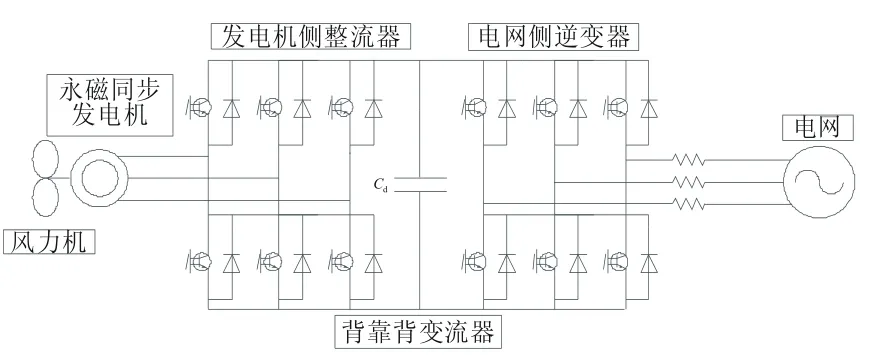
图1 直驱永磁风力发电系统拓扑结构
正常工作时,风力机带动PMSG产生三相交流电,电能通过PWM机侧整流器转换成直流电,经过电容的稳压,可形成类似直流电压源的效果,从而通过PWM网侧逆变器转换为稳定的三相交流电,传输给电网。发电机侧变流器控制的主要目标是:确保机侧电磁转矩的稳定,以保证风机的平稳运行和使用寿命;通过保持机侧产生的无功功率为零,保证发电机效率最高。电网侧逆变器控制的主要目标是:确保直流侧的电压稳定,以保证最终传输给电网的电能质量;通过保持网侧传输的无功功率为零,保证电能传输效率最高。而上述目标的实现要完全依靠PI调节器,故而其参数的设计至关重要。
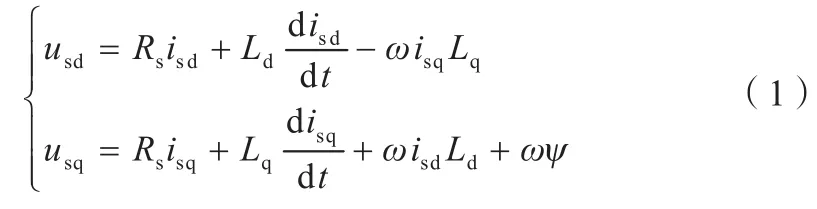
在两相同步旋转的dq0坐标系中,以发电机转子磁通为参考坐标系,可建立机侧整流器的数学模型[3]:
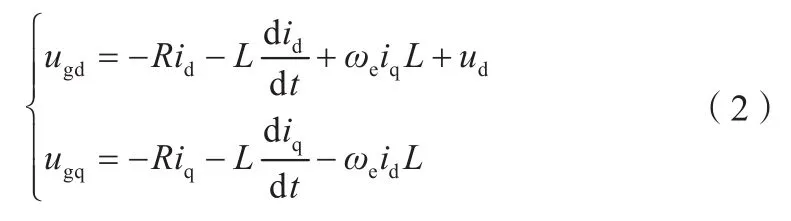
在两相同步旋转的dq0坐标系中,使d轴定向于电网电压矢量,文献[1]中的矩阵方程可推导电网侧变流器的数学模型如下:
2 变流器的控制原理和PI调节器的分类
2.1 变流器的控制原理
普通无功控制环节控制一般采用一个PI调节器[4-7],普通风电系统中的此环节也只采用一个PI调节器[8],其原因是给定的q轴电流为零,理论上一个PI调节器就可以控制。但是这为求解PI调节器的参数制造了麻烦,因为有功环节和无功环节不对称,需要再单独求解一次无功环节的PI调节器参数。为简化PI调节器参数设计,本文在普通无功控制环节控制上进行了一些改良,在无功控制环节中增加一个PI调节器,再创造出一个实际无功功率和给定无功功率的控制关系,使两个环节的控制完全对称,改进后的系统拓扑结构如图2所示。根据式(1),机侧整流器可引入双闭环控制,外环参数设定值为风机角速度ω和机侧无功功率s,内环的前馈为sd和sq;根据式(2),网侧逆变器可引入双闭环控制,外环参数设定值为直流电压dc和网侧无功功率,内环的前馈为d和q。
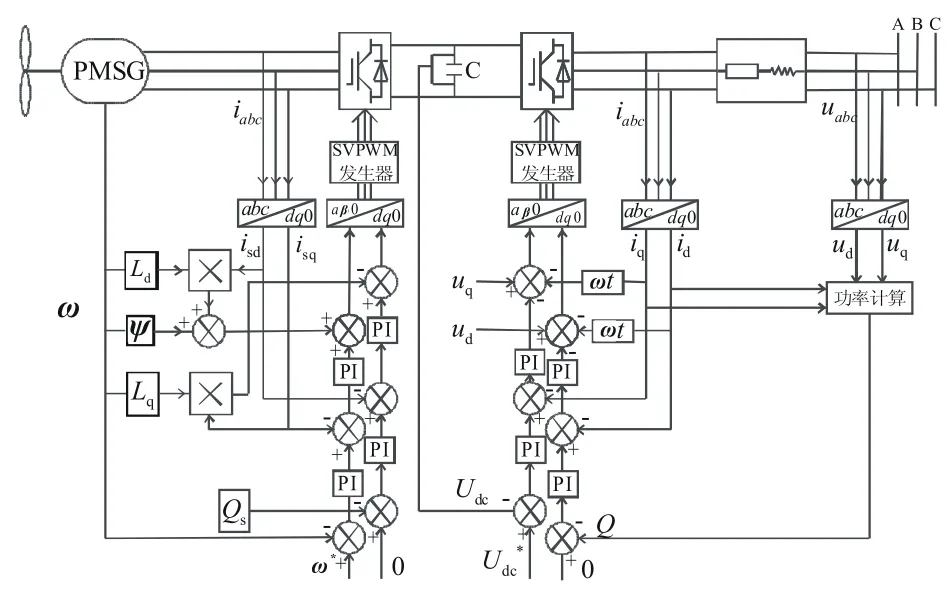
图2 变流器控制原理结构图
2.2 PI调节器的分类
由图2可知,改良后的控制模型一共有8个PI调节器的参数需要设计,如果依次求取必然会增加计算复杂程度,易于产生错误。把PI调节器进行分类可以有效地简化计算,提高效率。按照不同的变流器可以分为两组——机侧组和网侧组,在每个组里都有4个PI调节器,而每组的PI调节器都是以2个为单位左右对称的,这样就可以发现每组只需要设计2个PI调节器,其余的2个因为对称而与其数值相等,一共只需设计4个PI调节器参数就可以实现对整个系统的控制,同时每组的2个PI调节器都组成了双环控制环节,可一次推导出一组2个PI调节器的参数,简化了设计步骤。
3 网侧逆变器PI调节器参数的设计
电流环作为内环,作用是迫使输出电流时刻追踪外环给定的电流,进一步提高系统的动态响应性能。在正常工作状态下,PWM并网逆变器调制区并未饱和,d轴和q轴的电流可以被完全解耦。在设计内环时,要考虑反馈信号所经过的电抗器的影响和逆变器本身的时间常数,通常时间常数是其开关周期的一半,但是考虑到器件的延时等因素,而且都是较小的时间常数,所以就直接算到一起,直接取1.5倍的时间常数。两个电流PI调节器具有对称性,故其设计方法及参数相同,下面以直流电压电流双环为对象进行设计,由图2可以得到电流内环控制图,如图3所示。

图3 电流内环控制图
在处理式(3)时有不同的方法,如采用合并较小量约项法[4],r最小准则法[5-6],配置一对共轭极点的约项法[7]和二阶“最优”模型法[8]。本文采用r最小准则法和较小量约项法相结合的改进方法进行处理。如果按r最小准则确定典型II型系统的参数关系,有,而把典型II型系统的跟随与抗扰性能指标综合起来看,=5为最佳的选择。此时可知τi和都是较小的量,所以可约等两项,约去后可推导出其闭环传递函数:
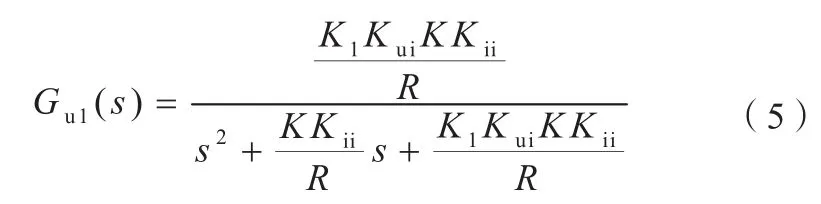
PWM并网逆变器的电压外环的主要作用是使直流侧电压保持恒值,使电容可以等效成恒压源,达到整定电压、滤除干扰的目的。电压外环的控制图如图4所示。图中up和ui是电压调节器PI控制的比例参数和积分参数,20()表示PI环节,21()是电流内环的闭环传递函数,22()是逆变器的逆向传递函数。
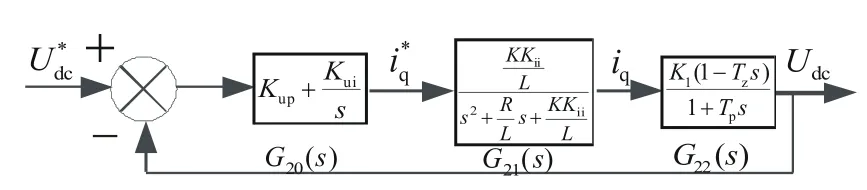
图4 电压外环控制图
由图4可以推导出电压外环的开环传递函数为:
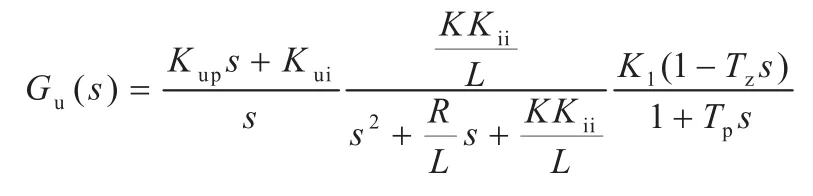

Tz<<Tp,故,相比于保留高次项3,本文在此处消去了高次项3,可在一定误差范围内简化计算,推导出其闭环传递函数为:
4 机侧整流器PI调节器参数的设计
本文在网侧逆变器PI调节器参数设计过程的基础上设计了机侧整流器PI调节器参数的设计流程,以角速度电流双环为对象进行设计,由图2、图3类比推导可得机侧整流器电流内环的控制图,如图5所示。
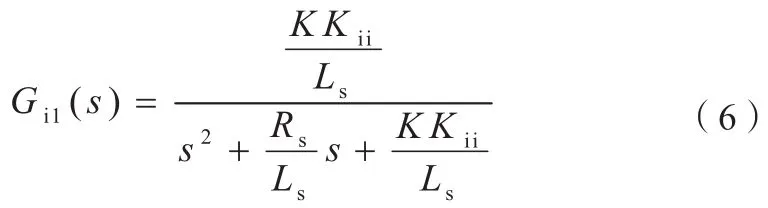
类比网侧逆变器电流内环的推导过程可得出机侧电流内
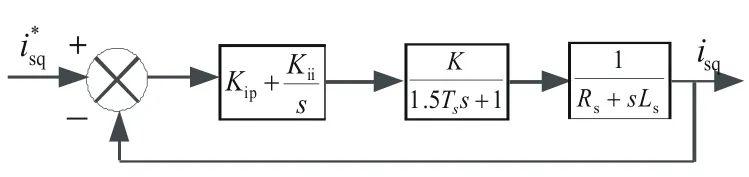
图5 电流内环控制图
环的闭环传递函数为:
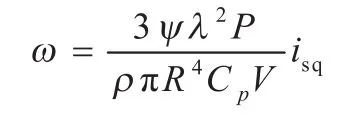
由图2、图4类比推导可得机侧整流器速度外环的结构图,如图6所示。图中的i1()即为式(6),2()是一个ω关于的函数,也是机侧速度外环PI调节器参数求解的一个重点。ω与直接的表达公式是没有的,必须要推导。电机运动方程表达式为[1]:
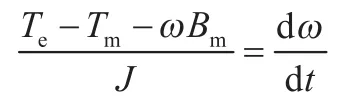
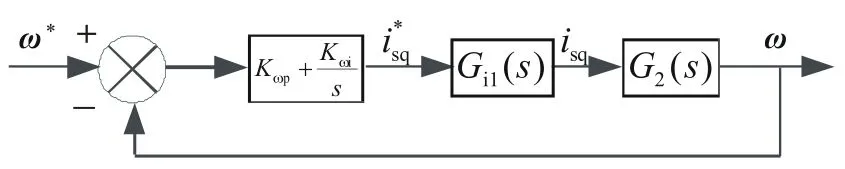
图6 速度外环结构图


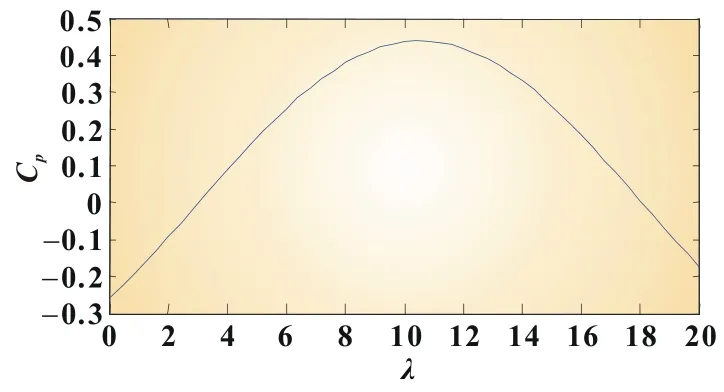
图7 -关系示意图
5 仿真与实验结果
根据直驱永磁风力发电系统控制平台的拓扑结构可建立Matlab仿真模型。机侧整流器部分的参数为:电机定子电感s=9mH,电阻s=0.2Ω;总粘性阻尼系数m=0.001;总转动惯量=0.008;永磁磁通Ψ=0.196;发电机极对数=20;空气密度ρ=1.225 kg/m3;风机叶片半径=2.32m;风速=8m/s;通过图7可知功率系数=0.44,叶尖速比=10.4。网侧逆变器部分的参数为:网侧电压幅值m=311 V;电抗器的电阻和电感分别是=1.2Ω和=6mH;直流侧的电容=10mF;给定的直流电压=600 V。PWM的开关频率=5 kHz,故逆变器的开关时间常数=10-4s,实验时间为1 s,网侧频率为工频(50Hz),以此分别计算电流和电压调节器参数。
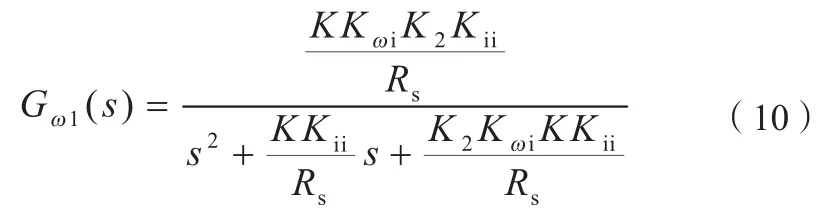
将所需参数值分别代入式(4)和式(5)中,可推导出网侧电流内环ip和ii分别为0.047和62.22,电压外环0.64和128.7;代入式(6)和式(10)中,可推导出机侧电流内环ip和ii分别为0.47和2.22,速度外环ωp和ωi分别为0.39和1.715。将参数分别输入各个PI调节器中,可得到图8所示波形。
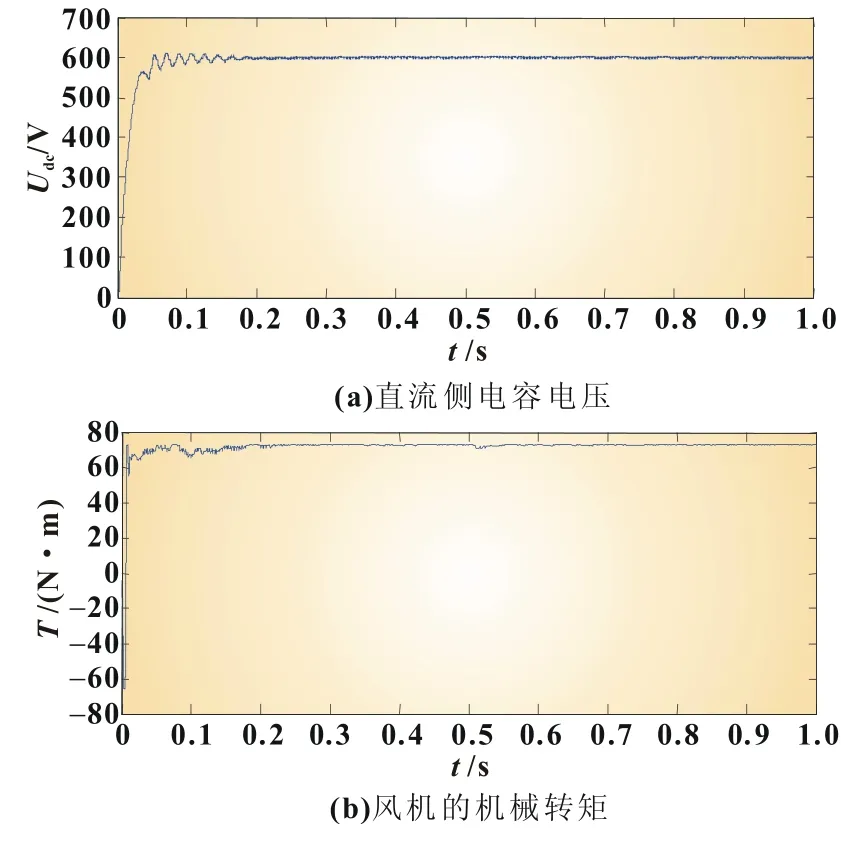
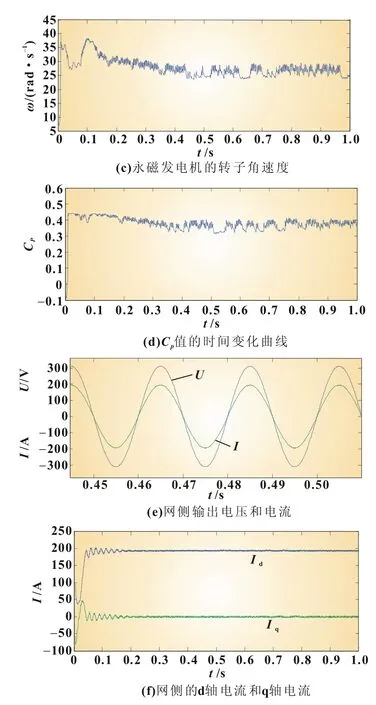
图8 直驱永磁风力发电系统运行时的波形图
6 结束语
通过对永磁风力发电系统的分析,对控制结构进行了局部的改良,添加了PI调节器并对其分类,简化了计算过程,减少了计算数量。运用改良的计算流程对网侧逆变器PI调节器参数进行了设计,在此基础上参照其设计过程创建了机侧整流器PI调节器参数的设计流程,并将设计结果在Matlab下进行了仿真,仿真结果表明:本文对永磁发电系统PI调节器参数的设计符合系统控制要求;对控制结构的局部改良是恰当的;网侧逆变器的改良算法是合理的;创建的机侧整流器的设计流程是正确的。
[1]李建林,许洪华.风力发电系统低电压运行技术[M].北京:机械工业出版社,2008.
[2]朱炜锋,窦伟,徐正国,等.基于PI控制的三相光伏并网逆变器电流控制器设计[J].可再生能源,2009,27(2):55-58.
[3]MEIJ,MEIX F,ZHENG JY,etal.Low voltage ride through characteristics analysisof direct-driven wind power system[C]//Proceedings of 2010 International Conference on Electrical and Control Engineering.Wuhan:ICECE,2010:3866-3870.
[4]赵振波,李和明.单位功率因数PWM整流器双闭环PI调节器设计[J].电工技术,2003,5:68-71.
[5]明战起,石新春,周国梁.电压型PWM整流器比例-积分控制器的参数设计[J].电力科学与工程,2008,24(9):19-22.
[6]景小萍,高庆华.三相PWM整流器双闭环PI调节器的新型设计[J].通信电源技术,2010,27(2):44-47.
[7]舒为亮,张昌盛,段善旭,等.逆变电源PI双环数字控制技术研究[J].电工电能新技术,2005,24(2):52-54.
[8]戴金水,吕敬.风力发电并网逆变器双闭环PI调节器的设计[J].电工电气,2011,9:5-9.
[9]胡寿松.自动控制原理[M].北京:科学出版社,2002.
[10]卓忠疆.机电能量转换[M].北京:水利电力出版社,1987.
PIadjustor parameters design of controlsystem of PMSG
ZHAO Feng,LIPeng-fei
Based on the analysis of the controlsystem topology structure of permanentmagnetsynchronous generator (PMSG),the partial improvementof the system controlstructure was conducted,and the categories of the PIadjustor parameters were distinguished,so that the PIadjustor parameters design process was simp lified and the number of PIadjustor parameters com putation was reduced.In the process of the grid-side inverter PIadjustor parameters design,the derivation process was improved,and the derivation process of generator-side rectifier PI ad justor parameters was built based on it.In Matlab,the PMSG simulation modelwas built,substituting parameters to conduct dynam ic simulation.The simulation results showed that the designed PIad justor parameters could meet multiple requirements during PMSG operation,and could keep it smoothly operate,demonstrating the correctness and effectiveness of the created system simulationmodeland the proposed parameters design process.
PMSG;converter;double closed-loop control;PIadjustor;parameter design
TM 31
A
1002-087 X(2014)05-0909-05

2013-11-20
赵峰(1966—),男,上海市人,教授,主要研究方向为电气自动化、新能源控制与转换理论及技术。
