基于MATLAB的机床导轨垂直度误差的评定
2014-07-02周景亮
周景亮
(福建工程学院机械与汽车工程学院,福建 福州 350108)
0 引言
检验机床导轨线对线垂直度误差的方法很多.文献 [1]采用平尺、直角尺和千分表来测量,但这种方法用平尺、直角尺作为测量基准,其精度较低;文献[2]采用经纬仪测量大尺寸三维导轨垂直度误差;文献 [3]采用激光干涉仪;文献 [4]则采用双频激光干涉仪测量电梯导轨的垂直度误差.经纬仪和激光干涉仪测量精准,但价格昂贵,尤其是激光干涉仪,不利于中小型企业以及高校教学的推广应用.
在企业和高校实验室最常采用的是自准直仪或框式水平仪,它们可以对基准要素和被测要素进行分段测量,这种设备成本低,检测方法易于掌握.一般先确定基准要素的方位,再求被测要素对基准要素的垂直度误差,然后用图解法处理测量数据,但这种图解法数据处理效率低,尤其是测量点数较多时,容易引起作图误差.
因此,本文采用框式水平仪进行测量,建立垂直度误差的数学模型,利用MATLAB软件编制相应的计算机数据处理系统来满足基准要素的直线度误差和被测要素的垂直度误差的求解.
1 数据处理
机床导轨垂直度误差,其实质就是在给定方向上的线对线垂直度误差.根据GB/T 1958—2004的原则,垂直度误差值是用定向最小区域的宽度f来表示[5],而定向最小区域的方向由基准确定.
1.1 建立基准方向
直线度误差的数据处理方法较多,常用的有两端点连线法、最小二乘法和最小包容区域法.其主要任务都是找出理想直线.假设该理想直线方程为y=Ax+B,基准提取要素各采样点Pi(xi,yi)(i=1,2,…,n)到理想直线的距离为

那么直线度误差即为

直线度误差评定示意图如图1所示.
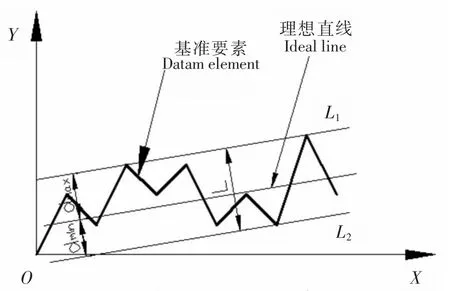
图1 直线度误差评定示意图Fig.1 Schematics of straightness error
1.1.1 最小条件法
最小条件法是国家标准规定的方法,该方法是一种仲裁方法,所得的误差值是唯一的、最小的.按该方法评定直线度误差实质上是寻找包容基准提取要素且距离最短的两平行直线.
根据式 (1),建立最小条件法的目标函数F(A,B)=[di]max-[di]min,当其满足最小化时,F(A,B)的A,B即理想直线的斜率和截距,且该二元函数的最小值即为直线度误差,或根据式 (2)求得直线度误差.
1.1.2 最小二乘法
最小二乘中线即为理想直线,它使基准提取要素各采样点到该直线的距离的平方和为最小.因此,最小二乘法的目标函数当其满足最小化时,F(A,B)的(A,B)即为理想直线的参数,进而根据式 (2)求得直线度误差.
1.1.3 两端点法
以测得的误差曲线首末两端点的连线为理想直线,两端点坐标分别为(x1,y1),(xn,yn).则A=(yn-y1)/(xn-x1),B=yn-Ax.同理求得直线度误差.
1.2 线对线垂直度误差评定
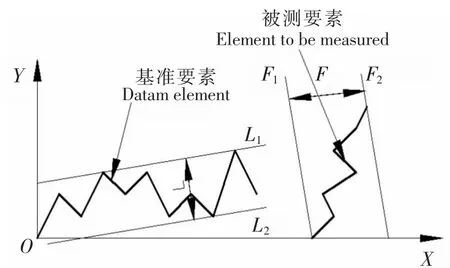
图2 垂直度误差评定示意图Fig.2 Schematics of perpendicular error
在同一坐标系中,过被测提取要素的各个测点做垂直于理想直线的垂直线族.过最远点和最近点的两条平行直线F1、F2间区域即为定向最小包容区域,这两平行线之间的距离就是垂直度误差,如图2所示.
设过第一个被测提取要素采样点A(x1,y1),做基准方向理想直线y=Ax+B的垂线,该垂线的斜率K=-1/A,根据直线的点斜式方程,可求出该垂线方程为:y-y1=(-1/A)×(x-x1).
求各被测提取要素采样点 Mi(xi,yi)(i=1,2,3…,n)到上述垂线的距离那么垂直度误差F=max{Di}-min{Di}.
2 测量实验
笔者按前述的数学模型,利用MATLAB软件,编写了数据处理程序,并制作了友好界面[6-7],用户只需输入测点的数据,计量器具的分度值,桥板跨距,并选择评定方法,就可得到直线度以及垂直度误差,并绘出误差图形.可清楚的反映出被测量的几何特征,评定准则的应用情况,并对计算结论进行验证.
测量X6132铣床横向导轨和垂直导轨在给定平面内的垂直度误差.测量示意图如图3所示.以较长的垂直导轨面为基准要素,横向导轨面为被测要素.采用框式水平仪,其分度值p为0.02 mm/m,桥板跨距l为100 mm,横向导轨长度为650 mm,分6段进行测量;垂直导轨长度为1300 mm,分10段进行测量.测量数值见表1.

图3 测量示意图Fig.3 Schematic of measuring method

表1 测量数据Tab.1 Measured data

图4 最小区域法数据处理界面Fig.4 Data processing interface for the minimum region method
将测量数据输入系统的界面,选择基准要素的评定方法,可分别计算直线度及垂直度误差.并在界面右边绘出误差示意图,进一步验证算法的正确性.基准符合最小条件法的直线度、垂直度误差数据处理操作界面如图4所示.界面右上角区域为直线度误差示意图,上包容线过最高二个点 (3点、9点),下包容线过最低点8点.从直线度误差最小区域判别准则上来看,该条件满足高—低—高准则;界面右下角区域为垂直度误差示意图,该图形左侧为基准要素,右侧为被测要素,被测要素的左包容线过最近点0点,右包容线过最远6点.且都垂直于基准方向.二者间即构成定向最小包容区域.可见该系统采用最小区域法评定的结果符合形位误差国标定义的评定标准.本系统对三种数据处理方法都进行了验证,结果都符合其建模原理.三种数据处理方法所得的结果见表2.

表2 测量结果Tab.2 Measured result
绘制误差曲线图时,为了更直观地看出误差曲线的走向,基准要素横坐标按比例缩小,纵坐标按比例扩大;被测要素纵坐标按比例缩小,横坐标按比例扩大,误差折线是变了形的实际轮廓线,误差按纵、横向读取值为f',按法向方向上读取值为 f,f'=1.000000001f[8],不会影响测量结果的精确度.因此若采用作图法求解时,应分别在最小包容区域的纵坐标、横坐标方向上读取数值,而不是在包容区域的法向方向上读取.
本系统利用MATLAB数学软件求解误差值,横、纵坐标可按实际测量值带入计算,因而在最小包容区域的法向上计算数值.
笔者又通过AUTOCAD作图法分别用端点法和最小区域法对相同数据进行图解法计算 (见图5、图6).当用框式水平仪测量时,原始采样数据的单位用水平仪的格数,因此将作图法所得数值乘以当量系数C=p×l=(0.02/1000)×100=0.002 mm,即得到与数据处理软件相同的结论.进一步证明了该系统的可靠性和准确性.

图5 AUTOCAD两端点连线图解法Fig.5 Graphic method with the two-endpoint based on AUTOCAD
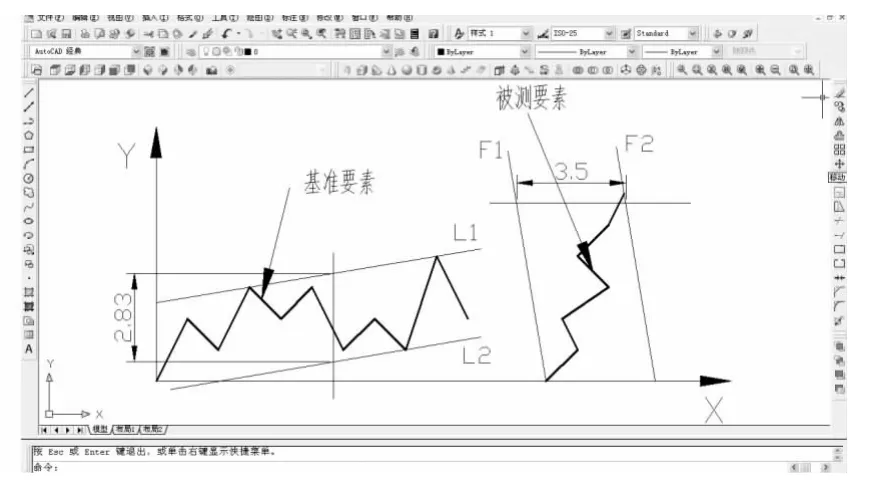
图6AUTOCAD最小区域图解法Fig.6 Graphic method with the minimum region based on AUTOCAD
3 结论
实践表明,用计算机对机床导轨垂直度误差进行数据处理,该系统能同时满足真正符合最小包容条件的机床导轨直线度误差和垂直度误差的求解.可大大提高计量人员的工作效率,把每次测量数据依次输进去,在输出窗口显示误差值和图解法处理的示图.这是一种方便可靠的数据处理方法.
[1]接明,王树杰,孙彦斌.利用激光干涉仪对重大型数控机床两线性轴间垂直度测量方法的探索 [J].计量技术,2009(5):34-36.
[2]任顺清,陈海兵,赵洪波.用光学经纬仪测量大尺寸三维导轨垂直度的方法[J].仪器仪表学报,2012,33(1):188-193.
[3]姜孟鹏.极坐标数控铣齿机直线度和垂直度的干涉测量 [J].机械设计与制造.2010(10):160-162.
[4]李醒飞.电梯导轨几何误差测试系统[J].中国机械工程,2005,16(4):303-306.
[5]中国国家标准化管理委员会.GB/T 1958—2004 产品几何量技术规范 (GPS)形状和位置公差检测规定 [S].北京:中国标准出版社,2005.
[6]飞思科技产品开发中心.MATLAB 7基础与提高[M].北京:电子工业出版社,2005.9.
[7]GERALD RECKTENWALD.数值方法和MATLAB实现与应用[M].伍卫国,方群,张辉,等译.北京:机械工业出版社,2002.
[8]迟彦孝.直线度误差的评定方法及其数学证明 [J].机械制造与自动化,2003(5):14-16.
