基于JSCORS与似大地水准面精化模型的RTK三维水深测量研究
2014-07-02李昱刘杰
李昱,刘杰
(长江南京航道局,南京210011)
基于JSCORS与似大地水准面精化模型的RTK三维水深测量研究
李昱,刘杰
(长江南京航道局,南京210011)
文章以长江江苏段为实例,提出了一种RTK三维水深测量测量方法,利用长江江苏段沿岸的控制点资料,基于分段二次曲面与BP神经网络拟合算法建立似大地水准面精化模型。利用该模型换算测深点高程数据文件,并输出数据成图。经多方面精度测试比对,此方法能够获得高精度的水底点高程。
RTK三维水深测量;似大地水准面精化;二次曲面;BP神经网络
随着水运事业的不断发展,水下地形测绘工作也越来越显出其重要性。目前水下地形测量大多采用实际人工或自动验潮方法直接获取水深测量时的水位,这种方法作业效率不高、获取的水位精度相对较低,同时存在人为干扰因素导致其可靠性不强[1-2]。
本文以长江江苏段为实例,提出了一种RTK三维水深测量方法。
1 RTK三维水深测量原理
随着全球定位技术的日益发展,能够在动态环境下实时获取厘米计甚至毫米级的平面定位精度和厘米级的高程定位精度,GPS测高精度的保证使得RTK三维水深测量技术成为可能[3-4]。
RTK三维水深测量原理如图1所示。GPS接收机的天线高程减去杆长再减去换能器下水深即为水底高程[5],公式如下

式中:H为水底点高程;HGPS为天线高程;b为杆长;S为换能器下水深。
采用RTK三维水深测量模式,摒弃了传统水下地形测量对潮位观测的严格要求,直接获取水底点高程,可以有效地消除动吃水以及波浪上下等因素影响;可进行全天候作业,不受昼夜影响,提高作业效率;避免了由于潮位观测带来的水位改正误差,可得到即时水位无需人工设立水尺进行水位观测,节约成本[6]。
RTK技术在高程测量中的精度主要取决于仪器本身的精度和高程异常的拟合精度,仪器本身的精度为已知,因此长江下游RTK三维水深测量技术中解决大范围条带状高程异常问题是关键,也是本文关注的重点[7]。

图1 水面高程与测深原理示意图Fig.1Sketch of water surface elevation and sounding theory
2 高程拟合方法
目前高程拟合的方法主要有多项式拟合和神经网络等方法,本文根据已有资料,分别采用二次曲面拟合、BP神经网络、分段二次曲面与BP神经网络拟合3种方法进行对比研究[8]。
上述3种方法的优缺点如表1所示。
对于大区域的似大地水准面精化工作,单一的拟合模型难以满足精度要求和实际工程的需要,为了提高拟合精度,采用分区拟合的方法[9]。
以本文所研究的长江江苏段为例,该区段总长约400 km,呈现狭长的条带状。通过对已有控制点高程异常资料分析可知,其高程异常由西向东,呈增大趋势,增大幅度有较大差异,并且不成明显线性规律。从西到东高程异常的变化值近12 m;南北两岸高程异常的变化值也可达分米级的变化。因此,采用分段拟合的方法是解决这一问题的有效手段。考虑到研究范围呈狭长条带状,控制点选取时沿长江两岸成对布设,以有利于对条带状地形的两侧控制和后期的高程拟合。
根据分段总体拟合精度高、区域数尽量少的原则,综合考虑了控制点、长江走向、高程异常等因素,进行多次分区调试后,本文最终确定将长江江苏段分成8个分段,相邻两个分段用数学函数平滑连接成一体,最终形成了长江江苏段的似大地水准面精化成果。每个分段长度在50 km左右,控制点在18个左右,其中用8~10个控制点来进行似大地水准面精化模型解算,剩下的点作为检查点来检核模型的稳定性和准确性。
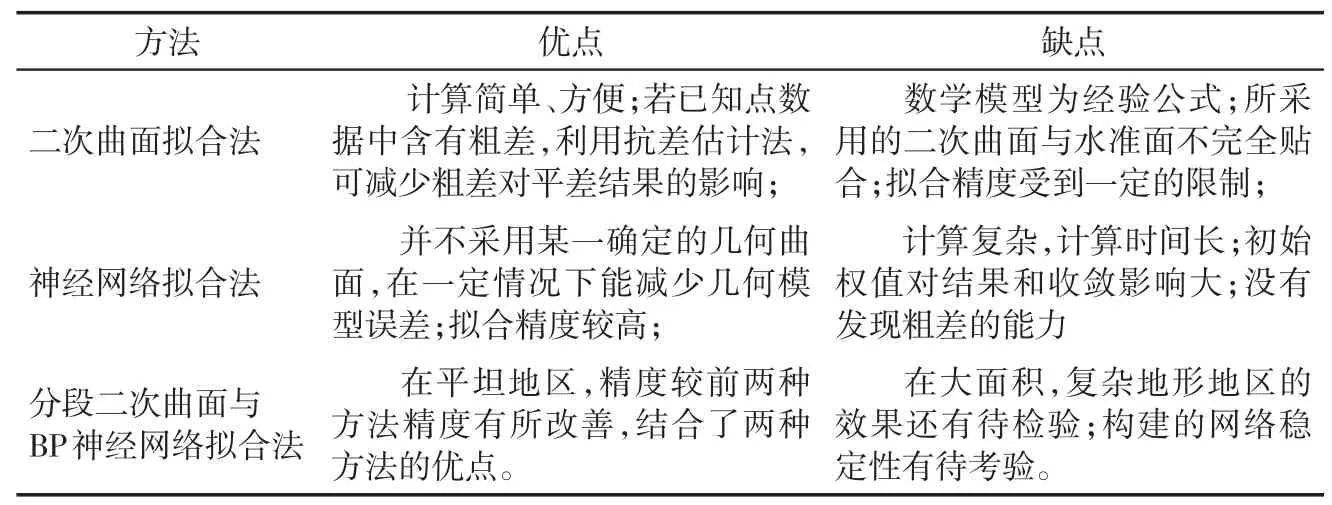
表1 三种拟合方法的优缺点比较表Tab.1Advantages and disadvantages of three fitting methods
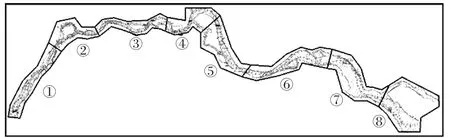
图2 长江江苏段分段拟合示意图Fig.2Sketch of Jiangsu section of the Yangtze River
3 RTK三维水深测量系统构建
考虑到长江下游江面较宽,传统RTK作用范围约10 km,本文采用JSCORS构建RTK三维水深测量系统。
江苏省全球导航卫星连续运行参考站综合服务系统(Jiangsu Continuously Operating Reference Stations,简称JSCORS)于2006年12月建成并投入运行。该系统通过在全省及周边范围内建设的70个GNSS连续运行参考站,在江苏省内建立了一个高精度、高时空分辨率、高效率、高覆盖率的全球导航卫星系统综合信息服务网。
本文研究的RTK三维水深测量系统基于JSCORS精确测定GPS天线位置的三维坐标(平面位置和大地高),并根据似大地水准面精化成果开发“长江江苏段无验潮高程拟合”软件,将其无缝嵌入中海达测深软件内业处理流程中,形成RTK三维水深测量系统[10-11]。具体操作流程如图3所示。
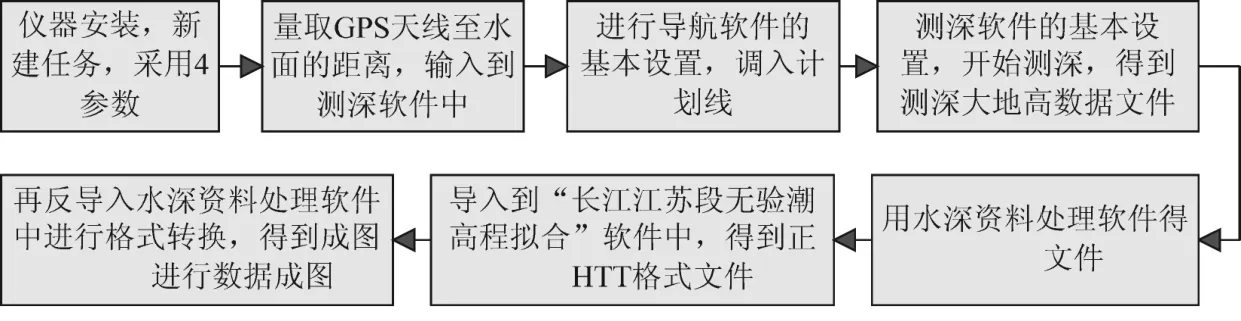
图3RTK三维水深测量系统操作流程图Fig.3Operation flow chart of non⁃tide sounding survey system
4 精度分析
检测工作包括似大地水准面的精度测试和水下地形对比精度测试两部分[12]。
4.1 精化模型精度测试
4.1.1 已知控制点精度测试结果
通常用内符合精度和外符合精度指标来确定大地水准面的拟合精度M。其中,根据拟合点的残差计算内符合精度,根据检核点的残差计算外符合精度。内符合精度用来说明模型学习样本的能力,外符合精度是用来检验模型的精度。
长江江苏段分成8个分段来进行高程拟合。先计算出已知点的高程异常真值,然后利用课题组研制的软件计算出拟合后的高程异常值,再进行分析比较。对长江江苏段似大地水准面精化各分段拟合情况进行汇合,具体数据如表2。
从表2可知,内符合精度数值最大为3.01 cm,外符合精度数值最大为3.24 cm。第8分段由于面积控制范围相对较大,已知点相对较少,内、外符合精度数值较其他分段大,但其结果也优于系统设计的拟合精度要求。整个长江江苏段的似大地水准面精化系统综合的内符合精度指标为1.83 cm,外符合精度指标为2.17 cm。总体精度较好,满足RTK三维水深测量系统的水位测量的精度要小于5 cm的要求。
4.1.2 连续运行参考站精度测试结果
根据长江江苏段沿线17座连续运行参考站资料,计算出控制点的高程异常已知值,然后利用本文拟合后的高程异常值,再进行分析比较。具体数据如表3所示。
从表3可知,外符合精度为4.08 cm,相对上节结果精度偏低。经分析主要是由于连续运行参考站均建设在楼顶,高差均用三角高程方法向楼顶进行传递,可能存在一定误差;另外连续运行参考站成果资料可能与上节已知点之间存在一定的系统误差,但其最终结果也优于设计的拟合精度要求(小于5 cm)。
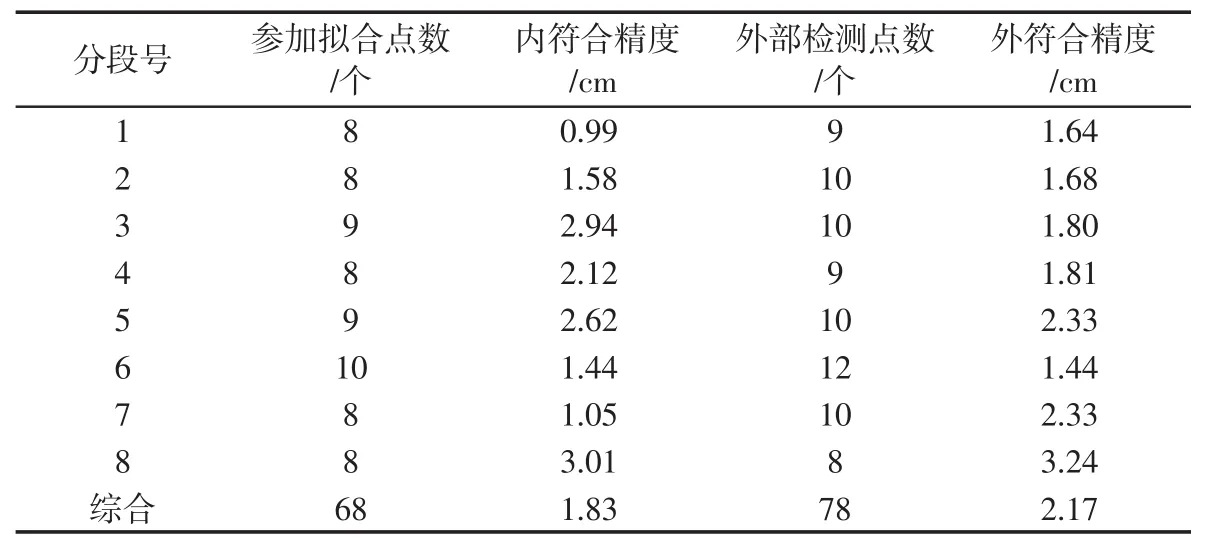
表2 长江江苏段似大地水准面精化各分段拟合情况统计表Tab.2Statistics of quasi⁃geoid fitting for each section in Jiangsu

表3 连续运行参考站测试拟合精度统计表Tab.3Statistics of cors fitting precision
4.2 水下地形对比精度测试
在长江江苏段所属某区段的典型江面上进行精度测试。分别用验潮法和RTK三维水深测量两种方法进行,对比两种方法水下河床的离散点高程,再进行分析统计:
测试选取了1条测线,共1 590个水下地形点进行统计分析,对比误差在0~3 cm的点占60%,对比误差在3~6 cm的点占29%,对比误差在6~8 cm的点占11%,对比误差大于8 cm的点占0%,符合正态分部。对比精度为3.8 cm,相对较小,说明两种进行的水下地形内业处理结果具有一致性。产生误差的原因初步判定为:验潮方法的水位测量误差、河心比降引起的水位误差、测量过程中船身动态吃水误差等综合影响,而这些误差正是RTK三维水深测量系统中所克服掉的。
经过似大地水准面的精度测试和水下地形对比精度测试两部分后,说明RTK三维水深测量系统总体精度较好(小于5 cm),满足规范要求。
5 结论
(1)本文研究通过GPS测高直接得出水底点高程,无需验潮便可完成水下地形测量工作。相对传统方法,RTK三维水深测量具有方便、简单和快捷等特点,能够有效消除动吃水以及波浪上下对水深测量的影响,能够避免水位测量误差、模型改正误差、水面比降等因素对整体测量精度的影响。(2)本文研究了一种基于二次曲面拟合和BP神经网络的似大地水准面精化方法,并开发了应用于长江江苏段RTK三维水深测量的转换模型软件,经多方面的精度测试,整体精度优于5 cm,满足设计需要和规范要求。(3)考虑到常规RTK差分技术作用距离受限,本文采用了JSCORS定位技术方案,与常规RTK三维水深测量系统相比,能够有效克服其作业范围小,高程精度受改正模型影响较大且改正精度不均匀、受参考站电台距离作业距离影响等缺点。(4)本文研究开发的长江江苏段似大地水准面精化软件,不改变传统测量方式,能够与常规海洋测绘软件无缝衔接,易于推广使用。
[1]殷晓东,陈跃.海道测量学[M].大连:海军大连舰艇学院,2006:172-174.
[2]GB12327-1998,海道测量规范[S].
[3]赵建虎,刘经南,周丰年.GPS测定船体姿态方法研究[J].武汉测绘科技大学报,2000,25(4):353-357. ZHAO J H,LIU J N,ZHOU F N.Method in Determining Vessel Attitude with GPS[J].Journal of Wuhan Technical University of Surveying and Mapping,2000,25(4):353-357.
[4]刘基余,陈小明.The Confidence Evaluation on GPS Kinematic Data[R].Colorado:XX I General Assembly,1995.
[5]卢军民,安延云,张东明,等.无验潮测深技术中影响水深测量精度的几个问题探讨[J].水运工程,2010(5):47-51. LU J M,AN Y Y,ZHANG D M,et al.Some issues affecting the accuracy of non⁃tide sounding survey[J].Port&Waterway Engi⁃neering,2010(5):47-51.
[6]颜惠庆,张俊.GPS⁃RTK无验潮水深测量技术在长江口航道治理工程中的应用[J].水运工程,2002(10):79-80,93. YAN H Q,ZHANG J.Application of GPS⁃RTK Bathymetric Survey Technique without Tidal Observation in Yangtze Estuary Chan⁃nel Regulation Project[J].Port&Waterway Engineering,2002(10):79-80,93.
[7]周丰年,田淳.利用GPS在无验潮模式下进行江河水下地形测量[J].测绘通报,2001(5):28-30. ZHOU F N,TIAN C.Underwater Topographic Survey with GPS under No⁃tidal Mode[J].Bulletin of Surveying and Mapping,2001(5):28-30.
[8]聂建亮.BP神经网络拟合似大地水准面的应用分析[J].测绘工程,2012(2):21-24. NIE J L.The analysis of BP neural network fitting the quasigeoid[J].Engineering of Surveying and Mapping,2012(2):21-24.
[9]张青贵.人工神经网络导论[M].北京:中国水利水电出版社,2004:11-14.
[10]刘雁春.海洋测深空间结构及其数据处理[M].北京:测绘出版社,2003:154-155.
[11]赵建虎.海洋测量内外业一体化软件包的研制[D].武汉:武汉测绘科技大学,1998.
[12]林辉,吴立新,方兆宝.水深测量的误差因子分析[J].海洋测绘,2005,25(2):2-3. LIN H,WU L X,FANG Z B.Analysis for Error Factor in Sounding[J].Hydrographic Surveying and Charting,2005,25(2):2-3.
Non⁃tide sounding survey technique on combination of conicoid fitting and BP neural network
LI Yu,LIU Jie
(Changjiang Nanjing Waterway Bureau,Nanjing 210011,China)
Taking Jiangsu section of the Yangtze River as an example,a non⁃tide sounding survey technique was presented in this paper.Using the data of Jiangsu section of the Yangtze River coast,the quasi⁃geoid model was established based on the combination of conicoid fitting and BP neural network.The sounding point elevation data files were converted by this model,and the data mapping was outputted.According to the comparison of precision tests,this method can get high precision elevation of underwater point.
non⁃tide sounding survey;quasi⁃geoid determination;conicoid fitting;BP neural network
P 229.3
A
1005-8443(2014)06-0633-04
2014-02-26;
2014-04-01
李昱(1983-),男,江西省九江人,工程师,主要从事测绘、航道、智能水运研究工作。
Biography:LI Yu(1983-),male,engineer.