永磁同步电机控制硬件在环测试平台的实现
2014-07-02葛宝明毕大强李秋生
林 潜,葛宝明,毕大强,李秋生
(1.北京交通大学电气工程学院,北京100044;2.电力系统国家重点实验室,清华大学电机系,北京100084)
1 引言
永磁同步电机具有结构简单,损耗小,重量轻,效率高,可靠性好等特点,常应用于电动汽车,航天航空等场合。在设计早期阶段,常用离线仿真来完成永磁同步电机的设计和测试工作。但是离线仿真的缺点是,其结果不能对控制器软件的实时参量进行评价,同时由于存在开关元器件的原因,系统的仿真时间过长。而实时仿真技术,如硬件在环(HIL)和快速控制原型(RCP),可以解决这些问题[1-3]。HIL实时仿真是指,用实时的数学模型来模拟被控对象,并与真实的控制器连接,进行整个系统的实时仿真测试。其优点是:可以降低研发成本,缩短系统开发周期,并且实验可重复性好,可进行极端或故障条件下的实验[3,4]。文献[3]提出采用 dSPACE 实现PMSM驱动系统20μs步长实时测试,但开关频率仅为2kHz,目前,PMSM驱动逆变器的开关频率已达到10kHz甚至更高,过低的开关频率影响控制性能。文献[4]提出基于FPGA的PMSM驱动系统模型的HIL实时仿真以50MHz速度运行,累计延迟4.14μs,但采用永磁同步电机DQ模型不能精确地模拟真实电机磁路的特点,同时其建模需要掌握HDL编程方法,过程较为复杂。
随着电机技术的提升,基于有限元分析的仿真软件(如JMAG、ANSYS等)已成为电机设计和开发的必要工具。与传统的永磁同步电机DQ模型相比,JMAG有限元分析模型能够更好地模拟电机磁路的非线性特点,其结果更加精确[5,6]。
本文利用JMAG建立PMSM的有限元分析模型,并结合RT-LAB搭建PMSM及逆变器的实时仿真系统,通过与真实的电机控制器(DSP)相连,实现PMSM硬件在环(HIL)实时测试平台,将该平台下的结果与全实物平台实验的结果进行对比,验证了所建立平台的有效性。
2 永磁同步电机HIL测试平台的结构
PMSM的HIL测试平台如图1所示,包括RTLAB实时仿真模型(永磁同步电机,逆变器)以及真实的DSP控制器两部分。
DSP控制器采用TI公司的 TMS320F2812芯片,采集RT-LAB实时模型输出的电机电流和位置信号,完成矢量控制算法后,输出6路PWM脉冲给实时仿真模型,完成永磁电机模型的控制。
3 RT-LAB实时仿真模型的实现

图1 HIL测试平台原理图Fig.1 Schematic diagram of HIL test platform
如图2所示,RT-LAB实时仿真模型包括基于有限元分析的永磁同步电机模型,三相逆变器两个部分。
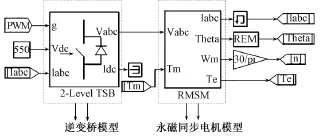
图2 RT-LAB实时仿真模型Fig.2 RT-LAB real-time simulation model
永磁同步电机模型根据电机的数学模型方程建立,其中电机的电感参数和磁链参数由JMAG的有限元分析模型生成(具体方法见第4节)。基于有限元分析的模型可以提高电机模拟的精确度。
逆变器的模型采用RT-EVENT模型库中带时间戳的三相逆变桥(Time-Stamp Bridge,TSB),它可以补偿由采样时间产生的误差,对高开关频率下的PWM信号特别有优势。
RT-LAB实时仿真模型,经过编译后下载到RTLAB实时仿真器中,利用RT-LAB仿真器中的模拟输出和数字输入信号调理板卡,把永磁同步电机的三相定子电流和位置信号输出给DSP控制器,同时采集DSP控制器输出的PWM脉冲。
4 基于JMAG的永磁同步电机模型
利用JMAG软件,在RT-LAB中建立PMSM的有限元分析模型的步骤如下:
(1)在JMAG中构建永磁同步电机的几何模型,设定材料属性和边界条件,并剖分网格。对建立的电机模型进行有限元分析,并生成包含电机电感参数和磁链参数的RTT文件。
(2)对比JMAG电机模型和实际电机的空载反电动势大小,验证JMAG电机模型的正确性。
(3)在RT-LAB中,根据永磁同步电机的数学方程,结合JMAG-RT工具库中的模块,构建PMSM的模型,该模型可以实时调用JMAG生成的RTT文件。
用于实验的电机为内装式转子结构的永磁同步电机,其定子直槽,槽数24个,转子内径60mm,极数4极,定子匝数40匝,额定功率1.5kW,定子电阻5.5Ω。如图3所示,根据实际电机的参数,在JMAG软件中建立电机的几何模型后,并进行了剖分网格。
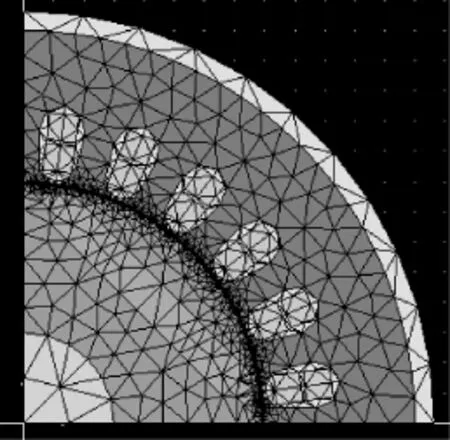
图3 永磁同步电机的有限元分析模型Fig.3 Finite element analysis model of PMSM
JMAG支持全域模型和周期模型分析,本文建立的是1/4的周期模型。接着设置电机的定子、转子、永磁体材料的特性等。在网格剖分设置后,便可以进行有限元分析,建立永磁同步电机的模型。
在JMAG中,设定电机模型运行在1500r/min条件下,测出电机定子输出的空载反电动势,如图4所示。从图4中的波形看出,相对于理想的电机DQ数学模型,它更好地模拟了电机的齿槽效应和电感的非线性特性。对该波形进行FFT分析,基波的峰值为318.9V。真实的电机试验得到的电压的基波峰值为318V,其误差范围在1%内,从而验证了电机模型的正确性。
永磁同步电机在自然坐标系下的数学方程[7]为:

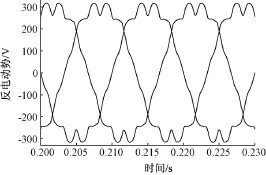
图4 永磁同步电机的空载反电动势Fig.4 Back-EMF waveform of PMSM

式中,p为电机的极对数。

式中,Ω为电机的机械角速度;RΩ为电机的旋转阻力系数;J为转动惯量。
应用上述三个方程,在RT-LAB中搭建永磁同步电机的模型,其中电机的电感参数L和磁链参数ψabc由JMAG的RTT文件提供。
5 硬件在环测试平台的实验验证
全实物平台和硬件在环测试平台的实际硬件如图5和图6所示。

图5 HIL实验平台Fig.5 HIL test platform
两个平台采用相同的DSP控制处理器,控制器实现id=0的矢量控制算法。控制软件包括初始化程序、主程序和中断程序。主程序主要功能是完成系统初始化、变量的初始化、等待中断响应等。定时中断程序主要功能是完成电流、位置信号的采集,坐标变换,转速、电流闭环调节和空间矢量脉宽调制等[8]。主程序和定时中断程序的流程图如图7所示。

图6 全实物电机实验平台Fig.6 Real objects test platform
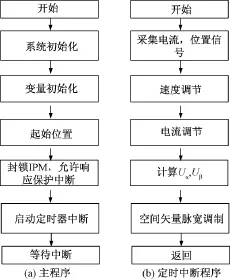
图7 主程序和定时中断程序的流程图Fig.7 Flow charts of main program and timer interrupt program
逆变器的开关频率为10kHz,死区时间为3μs。实时仿真模型运行的步长为20μs,根据模型计算的复杂程度,在该步长下RT-LAB实时仿真器不会出现计算溢出,确保了仿真的实时性。让电机分别运行在转速540r/min,负载转矩5.5N·m(运行状态1)和转速1000r/min,负载转矩5.5N·m(运行状态2)的两种状态,如图8所示。
图9和图10分别是两种运行状态1,2下,全实物电机实验和硬件在环平台实验的三相定子电流的稳态波形。
永磁电机的齿谐波次数v:

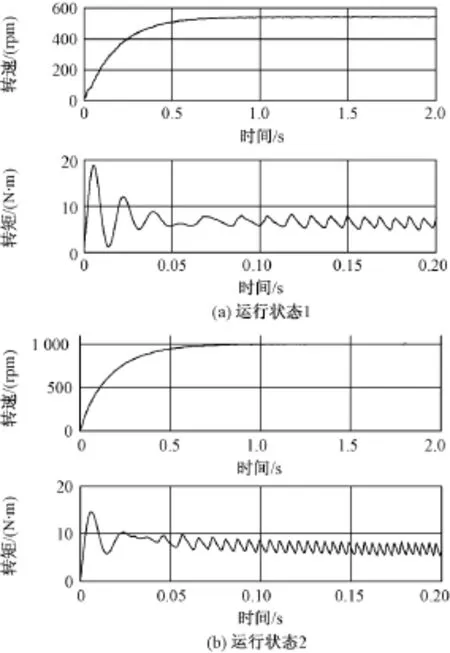
图8 运行状态1,2下HIL实验的转速和转矩波形Fig.8 Speed and torque waveforms of HIL test under condition 1,2

图9 运行状态1电流稳态波形对比Fig.9 Current waveforms under conditions 1
式中,Z为定子槽数;k=1,2,3…;p为极对数。
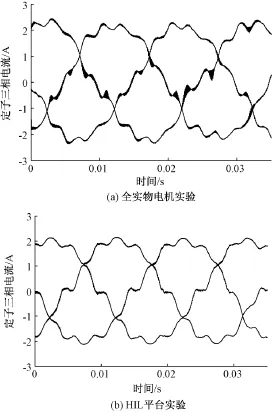
图10 运行状态2电流稳态波形对比Fig.10 Current waveforms under conditions 2
当k=1时,Z=24,p=2,电机的一阶齿谐波次数为11次和13次。三相定子电流经过FFT分析后,对比两次实验下基波和齿谐波的有效值大小,如表1、表2所示。从表1和表2中可以看出,运行状态1、2的基波有效值误差在5%内,齿谐波分量的误差在15%内。这充分验证了所建立的永磁电机HIL平台具有较高的准确度。电流的基波分量上的误差,来源于电流、转矩测量上的误差和电机模型精确度上的差异。
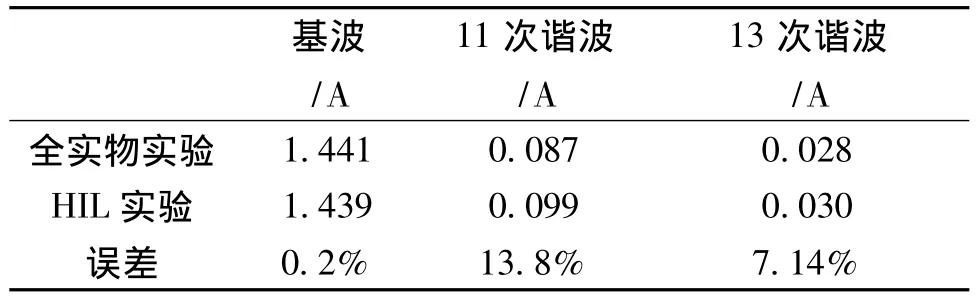
表1 运行状态1下全实物与HIL实验结果对比Tab.1 Results of real objects and HIL tests under condition 1
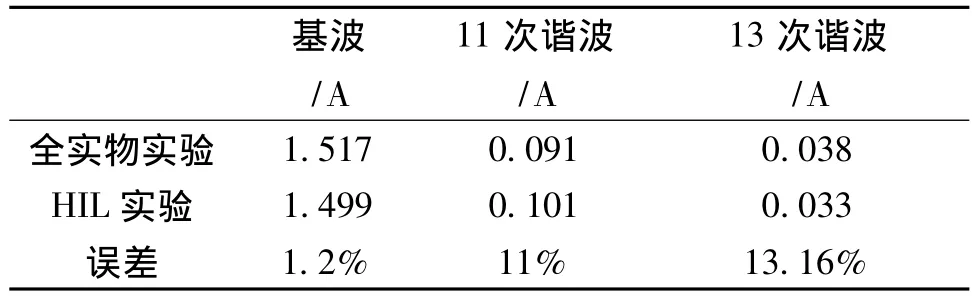
表2 运行状态2下全实物与HIL实验结果对比Tab.2 Results of real objects and HIL tests under condition 2
6 结论
基于JMAG建立的永磁电机有限元分析模型提高了电机模拟的精确度。利用RT-LAB搭建的实时仿真平台与实际的DSP控制器相连,实现了硬件在环的测试实验,其结果与全实物的电机实验对比,电流的基波有效值误差在5%以内,充分验证了该平台的有效性与准确性。硬件在环(HIL)测试平台的应用可以缩短电机设计的周期,节约研发费用。
[1]孙倩,林辉,王志远 (Sun Qian,Lin Hui,Wang Zhiyuan).永磁同步电机HIL仿真研究 (HIL simulation for permanent magnetic synchronous motor research)[J].电子测量技术 (Electronic Measurement Technology),2009,32(1):24-27.
[2]Song Ke,Liu Weiguo,Luo Guangzhao.Permanent magnet synchronous motor field oriented control and HIL simulation[A].IEEE VPPC [C].2008.1-6.
[3]卢子广,柴建云,王祥珩,等 (Lu Ziguang,Chai Jianyun,Wang Xiangheng,et al.).电力驱动系统实时控制虚拟实验平台 (Virtual test platform for real-time control of electrical drives)[J].中国电机工程学报(Proceedings of the CSEE),2003,23(4):119-123.
[4]黄苏融,史奇元,刘畅,等 (Huang Surong,Shi Qiyuan,Liu Chang,et al.).基于现场可编程门阵列永磁同步电机模型的硬件在环实时仿真测试技术(Hardware-in-loop real-time simulation test technology of permanent magnet synchronous motor model based on field programmable gate array)[J].电机与控制应用(Electric Machines& Control Application),2010,37(9):32-37.
[5]Dufour C,Belanger J,Abourida S.FPGA-based real-time simulation of finite-element analysis permanent magnet synchronous machine drives[A].IEEE PESC [C].2007.909-915.
[6]Dufour C,Lapointe V,Belanger J.Closed-loop control of virtual FPGA-coded permanent magnet synchronous motor drives using a rapidly prototyped controller[A].13th PEMC [C].2008.9.1077-1083.
[7]汤蕴璆,张奕黄,范瑜 (Tang Yunqiu,Zhang Yihuang,Fan Yu).交流电机动态分析 (Dynamic analysis of AC motors)[M].北京:机械工业出版社(Beijing:China Machine Press),2008.
[8]王春民,孙淑琴,安海忠,等 (Wang Chunmin,Sun Shuqin,An Haizhong,et al.).基于 DSP 永磁同步电动机矢量控制系统的设计 (Design of PMSM vector control system based on DSP)[J].吉林大学学报 (信息科学版)(Journal of Jilin University(Information Science Edition)),2008,26(4):343-346.