经验法设计气动程序电控系统
2014-07-01袁小会蔡逸飞
袁小会, 蔡逸飞
(1.武汉软件工程职业学院,武汉430205;2.阿尔斯通武汉工程技术有限公司,武汉430061)
经验法设计气动程序电控系统
袁小会1, 蔡逸飞2
(1.武汉软件工程职业学院,武汉430205;2.阿尔斯通武汉工程技术有限公司,武汉430061)
经验法设计气动程序电控系统的关键是干扰信号的处理。文中以定尺切断装置气动程序电控系统设计为例,阐述了经验法设计气动程序电控系统的过程及采用隔离继电器消除干扰控制信号的处理方法。
气压传动;电控系统;干扰信号;时序逻辑图
0 引言
气动程序电控系统是一种利用设计好的电气控制回路控制电磁换向阀,使各执行元件有序工作的一种控制系统[1]。其设计步骤为:绘制步序线控制信号总图、检查有无干涉信号、处理干涉信号、绘制电气控制状态时序逻辑图和控制电路、优化处理[1]。其中,检测及消除信号干涉是关键,若处理不当,系统运行时很容易出现误动作或故障。干涉主要有机械干涉(多个执行元件相撞)和控制信号干涉(在不同步序线上出现相同的控制信号)两大类。机械干涉比较直观,很容易发现;控制信号干涉需通过步序线控制信号图判断。控制信号干涉通常采用隔离的方式处理,其实质就是引入隔离继电器,将复现的控制信号与隔离继电器组合形成新的控制信号,与另外步序线上的控制信号区分开。本文以定尺切断装置气动系统程序电控系统设计为例,阐述经验法设计气动程序电控系统的过程及控制信号干涉消除的方法。
1 定尺切断装置气动系统工作过程
定尺切断装置气动系统原理图如图1所示。生产过程中,当产品达到预定尺寸时,电磁线圈CT1得电,夹紧缸5(A缸)伸出,产品被夹紧,行程开关a1发信,电磁线圈 CT2得电,切割缸6(B缸)带动切割刀片伸出进行切割。切割完毕后触发行程开关b1,CT2失电,电磁换向阀2在弹簧的作用下复位,切割缸B缩回,缩回到位后触发行程开关b0,CT1失电,电磁换向阀1在弹簧的作用下复位,夹紧缸A缩回,等待下一次切割。
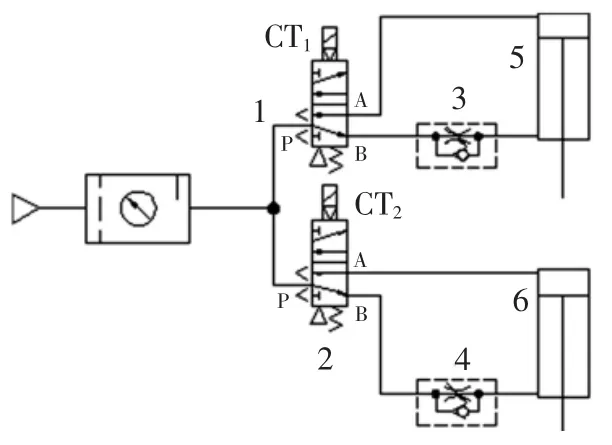
图1 定尺切断装置气动系统原理图
2 气动程序电控系统设计
根据上述分析,定尺切断装置气动系统工作过程可简化为A+→B+→B-→A-。下面利用经验法设计气动程序电控系统的步骤进行设计。
2.1 步序线控制信号总图
定尺切断装置气动系统的步序线控制信号总图如图2所示,凸起的为1,未凸起的为0。
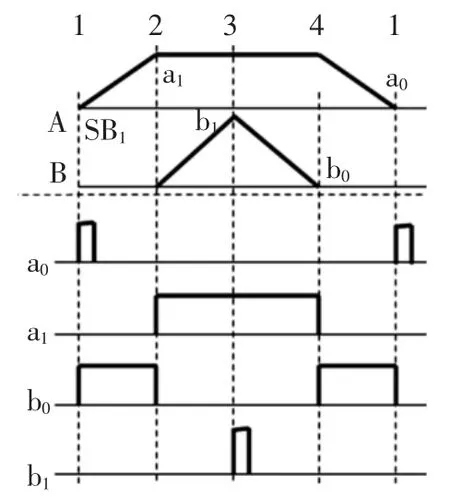
图2 步序线控制信号总图
2.2 控制信号干涉的消除
由图2可知:2号步序线和4号步序线上的a0、a1、b0、b1均为0、1、1、0,控制信号完全一样。4号步序线上的b0是A-的启动信号,无论与4号步序线上的其它控制信号怎么组合均与2号步序线上的控制信号一致。这就是说,在2号步序线上A会提前缩回,这与要求的动作顺序不符,动作过程紊乱。为了避免此现象,必须引入额外的继电器(记为K1),让它与b0组合形成新的控制信号,从而与2号步序线上的控制信号区分开。

图3 引入K1后的步序线控制总图
一个工作循环结束后,下一个工作循环由1号步序线上的控制信号a0启动(即a0控制A+),但此时控制信号b0仍处于发信状态(b0控制A-),控制A缸动作的电磁换向阀两端同时有控制信号(a0和 b0)输入,产生干扰,换向阀阀芯不知如何运动,程序动作紊乱。为消除此干扰,1号步序线上的控制信号a0启动前,控制信号b0必须消除。所以,继电器K1的启动信号为3号步序线上的b1,关断信号为1号步序线上的。引入K1后的步序线控制信号总图如图3所示。
2.3 绘制电气控制状态时序逻辑图和控制电路
1)第1个动作A+。
A+的启动信号为瞬时信号SB1,主控线圈CT1的得电需求从1号步序线一直到4号步序线,启动信号较主控线圈得电需求短,需采用自保持电路。
启动信号较主控线圈得电需求短,采用的自保持电路主要有两种:当有一控制信号发生在主控线圈得电需求的关断时序线上时,用该控制信号的常闭触点关断,组成继电器自保持电路;当有一控制信号发生在启动信号动作之前,结束在主控线圈得电需求的关断时序线上时,用该控制信号的常开触点关断,组成继电器自保持电路[1-2]。
由电器控制状态时序逻辑图可知:控制信号b0与继电器K1相与形成的新的控制信号的常闭触点出现在主控线圈CT1得电需求的关断时序线上,所以控制A+的自保持电路的启动信号为SB1,关断信号为。
2)第2个动作B+。
B+的启动信号为a1(从2号步序线开始,4号步序线结束),主控线圈CT2的得电需求从2号步序线到3号步序线,启动信号较主控线圈得电需求长,需找一控制信号与启动信号相与形成新的控制信号,此新控制信号与主控线圈的得电需求一致,形成是门电路。
由电器控制状态时序逻辑图可知:启动信号a1与关断信号相与后正好与主控线圈CT2得电需求一致。所以控制B+的是门电路由a1和CT2串联组成。
3)第3个动作B-、第4个动作A-。
A缸和B缸的动作由带复位弹簧的二位五通单电控电磁换向阀控制,主控线圈CT1、CT2失电后,B-、A-由换向阀的弹簧复位自动完成,无需设计电路控制。
通过上面的分析绘制出电器控制状态时序逻辑图、PLC梯形图及PLC外部接线图,如图4、图5和图6所示。图5中的I0.0~I0.4表示输入、Q0.0~Q0.1表示输出、M0.1~M0.3为PLC内部继电器,对应元件如表1所示。

图4 电器控制状态时序逻辑图

图5 PLC梯形图

图6 PLC外部接线图
3 结语
本文设计的电控系统成功应用于产品的切断。实践证明,引入隔离继电器消除控制信号干扰的设计方法合理;经验法设计气动电控系统的流程正确。

表1 接口对应表
[1] 廖传林,李维扬.液压与气动技术[M].北京:化学工业出版社,2011.
[2] 廖传林,李维扬.液压传动程序电气控制经验设计法优化分析[J].机床与液压,2013(8):121-123.
(编辑:启 迪)
Empirical Design Method in the Electrical Control of Pneumatic Program
YUAN Xiaohui1, CAI Yifei2
(1.Wuhan Vocational College of Software and Engineering,Wuhan 430205,China; 2.ALSTOM Engineering&Technology Co.,Ltd.,Wuhan 430061,China)
Interference signal process is the key technology in the empirical design method of the pneumatic program electrical control.An electrical control design of pneumatic program for the cut-off device is taken as an example,the design process is explained,and the elimination method of interference signal using the isolation relay is introduced.
pneumatic drive;electronic control system;interference signal;timing logic diagram
TP 272
A
1002-2333(2014)04-0124-02
袁小会(1980—),讲师,主要从事机械设计及电气控制、模具设计方面的教学与研究。
2014-02-19
湖北省教育厅科研项目(B20128803)
