一种基于手机加速度传感器的三维手势身份认证方法*
2014-07-01孙子文周治平
王 尧, 孙子文, 周治平
(江南大学 物联网工程学院,江苏 无锡 214122)
一种基于手机加速度传感器的三维手势身份认证方法*
王 尧, 孙子文, 周治平
(江南大学 物联网工程学院,江苏 无锡 214122)
针对手机用户安全问题,提出一种基于手机加速度传感器的手势身份认证方法。采用均值—方差归一化方式对三维手势数据进行归一化处理;采用门限值方法截取手势动作,去除干扰数据;认证算法采用模板匹配的方式,通过设计的均值—动态时间归整(A-DTW)算法对参考模板和测试模板进行比较,判断用户的真实性。仿真结果显示:该算法方便可行,具有较高的识别率。
身份认证; 加速度传感器; 手机安全; 手势识别
0 引 言
智能手机为实现手机支付、手机优惠券、手机银行、和移动VIP客户服务等移动电子商务提供了移动终端平台[1]。然而,手机的安全性问题阻碍了基于手机终端的移动交易业务的更深层次的应用研究和使用推广,手机用户身份认证问题是解决手机应用安全面临的严峻挑战。
基于智能手机传感器的用户身份认证为模式识别研究领域提供了新的研究空间。目前对于三维手势特征的研究多集中在手势识别领域[2],类似于手写识别[3],即识别不同人的相同手势动作。近期,少量的文献开始了基于加速度传感器的三维手势用于身份认证的研究[4~7]:利用手机加速度传感器采集得到用户摇晃手机的三轴加速度序列,并求序列的均值、最大值等作为用户的相关行为特征,通过支持向量机(support vector machine,SVM)对特征数据进行训练归类,以区分出不同用户[4];采用加速度传感器与方向传感器相结合采集得到三维手势动作的三轴加速度和角度序列,并利用动态时间归整(dynamic time warping,DTW)算法对不同序列进行匹配,求出序列之间的差异,根据差异值大小区分出不同用户,实现身份认证[5];采用加速度传感器采集三维手势动作的三轴加速度序列,通过序列对齐的方式,求出对齐后加速度序列之间的绝对值距离并采用模板更新的方式实现身份认证[6];通过方向传感器采集手腕转动时的三轴角度序列,以序列的均值、最大、最小值等作为特征,通过k最邻近(k-nearest neighbor,kNN)节点分类器训练样本,并根据训练出的模型区分出不同用户[7]。文献[4~7]提出的手机用户身份认证方式类似于传统的二维签名识别[8],是一种入侵者知道怎么去做但很难模仿成功的身份认证方式,但是,三维手势比二维手写签名更难被模仿[9],基于SVM和kNN分类器的算法中对经过分类训练的用户具有很好的区分能力,但是,对未经训练的用户区分能力较差,而且在训练时需要大量的样本数据,过程较复杂;基于模板匹配的算法需要的样本数据相对较少,但是,目前并没有取得较高的识别率,有待于进一步改进。
本文提出一种基于加速度传感器的三维手势身份认证方法,通过手机内置的加速度传感器采集得到三维手势的三轴加速度数据,对数据进行预处理操作,提出了DTW的改进算法:A-DTW(average-DTW)算法,计算不同手势序列之间的最小累积平均距离,并采用模板注册和模板匹配的方法实现身份认证,仿真实验表明算法具有较高的识别率。
1 手势数据预处理
1.1 数据的获取
三维手势动作的数据通过手机内置的加速度传感器获取,单位是m/s2。
定义手势的三轴加速度序列Ak,描述为


1.2 数据的归一化
基于手势动作的快慢会影响加速度数据的幅值大小,因此,采用均值—标准差归一化方式对加速度数据进行归一化处理,尽可能多地保留区分不同手势的距离信息。其计算公式如式(1)

(1)


(2)
(σxk,σyk,σzk)=

(3)
原始手势加速度数据经过归一化处理后,三轴加速度序列NAk描述为
1.3 手势动作数据的截取
为准确提取出手势动作的加速度数据,采用基于门限值的方法对手势动作的开始和结束进行判断[10],如果采集到的数据超过预先设定的门限值,则认为手势开始;手势开始之后如果在一段时间内数据都未超过门限值,则认为手势结束。
同时,考虑加速度传感器的三轴加速度值的开始和结束的不同步问题,为尽可能多地捕捉各轴加速度值对手势特征识别的贡献,分别对X,Y,Z轴进行手势动作加速度数据的截取,三轴手势动作数据的开始点定义为三轴手势动作数据的最早开始点,三轴手势动作数据的结束点定义为三轴手势动作数据结束点的最后点。
手势动作截取后的三轴加速度数据CAk描述为

(4)
其中,CXk,CYk,CZk分别为X,Y,Z轴截取后的加速度序列,p1,q1为手势动作开始和结束时刻。
2 手势匹配算法
2.1A-DTW算法
DTW算法是在动态规划的思想上,把时间规整和距离计算结合起来[11,12],具有非线性时间归一化效果的模式匹配算法。
DTW算法反映的是两序列之间的总体差异,并没有具体反映出序列对齐点之间的差异,而通过对齐点之间的差异能更好反映不同手势序列之间的差异,因此在DTW算法的基础上,本文提出对DTW算法中的最小累积距离进行改进的A-DTW算法,A-DTW具体描述如下
假设T(N)=(t1,t2,…,tn,…,tN),R(M)=(r1,r2,…,rm,…,rM),分别表示数据总个数为N的测试模板和数据总个数为M的参考模板。采用绝对值距离计算测试模板与参考模板数据之间的匹配距离

(5)
其中,tn为测试模板的第n个数据,rm为参考模板的第m个数据,d(tn,rm)为tn与rm的距离。
为避免匹配路径过于倾斜,本文将斜率限定在0~2范围内,路径的最小累积平均距离计算公式为

(6)

2.2 身份认证机制
2.2.1 模板注册
1)用户确定自己身份认证手势后,重复身份认证手势动作k次,采集得到k组加速度数据A1,A2,…,Ak,k取正整数。
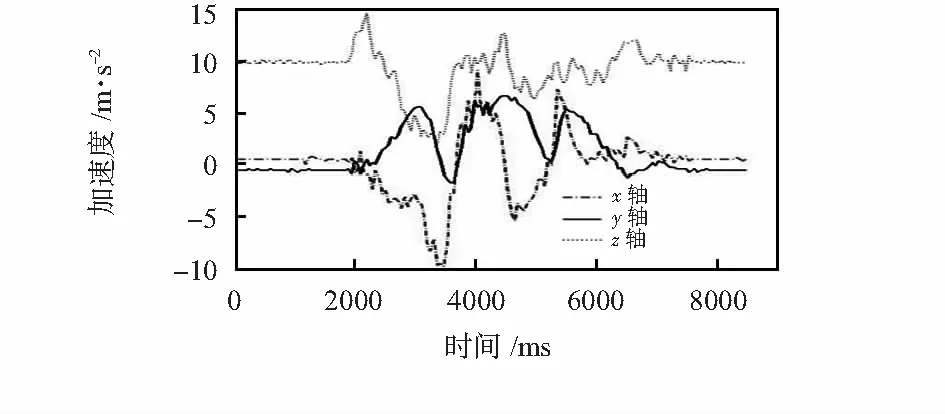
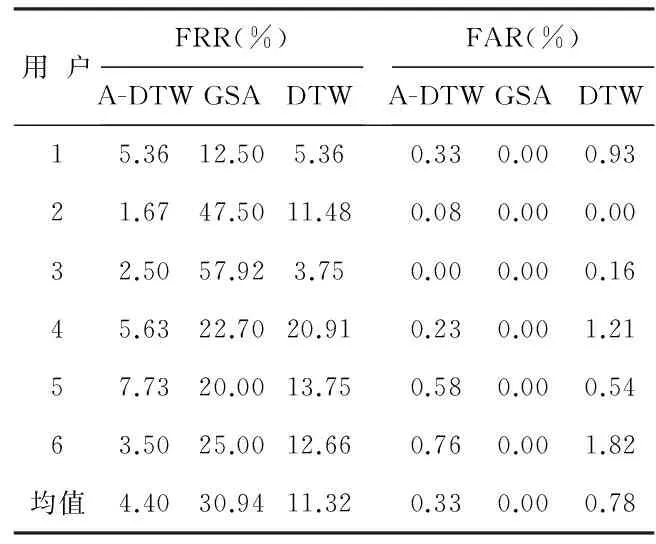
2)通过手势数据预处理后得到手势动作的加速度数据CA1,CA2,…,CAk,分别以CAi为测试模板CAj为参考模板,其中,1≤i 3)运用式(5)、式(6)分别计算对应X轴、Y轴、Z轴的最小累积平均距离,如计算组合(CAi,CAj)可分别得到D(CXi,CXj),D(CYi,CYj),D(CZi,CZj),并求average(D(CXi,CXj),D(CYi,CYj),D(CZi,CZj))得到三轴最小平均累积距离的平均值ω(CAi,CAj)。类似地计算以上 (k-1)!种组合并求得其平均值μ,将μ与CA1,CA2,…,CAk作为用户身份认证手势的模板存入系统。 用户在选取身份认证手势时应遵循以下原则: a.选取自己较熟悉且易重复做出的手势; b.整个手势动作的时间不宜太长或太短; c.手势开始和结束时手机应处于平稳状态; d.手势应相对复杂,不易被他人立即学会。 2.2.2 模板匹配 1)用户手持手机做身份认证手势一次得到加速度数据At,经过手势数据预处理后得到手势动作加速度数据CAt。 2)以CAt为测试模板,CAt,CA2,…,CAk为参考模板,计算测试模板与参考模板的三轴最小累积平均距离的平均值分别得到: ω(CAt,CA1),ω(CAt,CA2),…,ω(CAt,CAk),类似的计算其均值得到值ψ。 3)用户身份认证决策规则如式(7) (7) 其中,θ为阈值,θ的取值与识别精度相关,如果θ过大,则手机真实用户通过身份认证的概率将会增大,同时入侵用户通过身份认证的概率也会增大;如果θ过小,则相反。 4)模板更新:由于手势的多义性和多样性,即使是同一个用户执行同一个手势,每次采集的数据也存在差异[11],因此,本文采用模板更新的策略达到降低用户本人行为习惯对识别系统影响的目的,当测试模板通过身份认证且ψ与μ的比值小于α时,则用测试模板交替更新3个参考模板,当参考模板被更新产生变化时, 值也会改变。 3.1 数据采集与预处理 仿真设置:选用三星GT—I9001手机采集加速度数据,以Matlab7.11.0作为仿真平台。加速度数据库由6个不同用户连续24天采集得到,每人每天采集10组数据,即总共采集得到1 440组数据,用户身份认证手势均为在空中画出数字‘6’。选取错误拒绝率(falserejectionrate,FRR)和错误接受率(falseacceptancerate,FAR)2个参数评估算法的准确度,FRR表示真实用户被拒绝通过身份认证的概率,FAR表示入侵用户通过身份认证的概率,即FRR,FAR的值越小表示算法的识别精度越高。 选取用户1采集的某一组数据为例,其波形图如图1所示。通过均值—标准差归一化对三轴加速度数据进行归一化处理后得到的波形如图2所示,归一化使得三轴加速度数据约束在一定范围内,能在一定程度上减少手势匹配算法的计算量,提高匹配精度及系统效率。通过门限值的方法分别对三轴加速度数据进行截取,得到的波形如图3所示。 图1 原始手势数据Fig 1 Original gesture data 图2 归一化后手势数据Fig 2 Gesture data after normalization 图3 截取后手势数据Fig 3 Gesture data after interception 3.2 参数设置与仿真结果分析 阈值的确定原则:选取用户2的100组数据作为真实用户的数据,其他用户各取20组数据作为入侵用户的数据,分别求出不同阈值θ下的FRR和FAR,结果如图4所示,从图中可以看出:FRR曲线与FAR曲线的交点在1.5~1.6之间,此交点即为模式识别中的等错率点,为最优的分类点,因此,本文中阈值θ取1.56。 图4 阈值θFig 4 Threshold value θ 确定θ后,以类似的方法计算不同模板更新阈值α对应的FRR和FAR,最终确定阈值α取1.18,选取参考模板k的个数为3。 以某一用户作为真实用户,其余用户均作为入侵用户进行仿真实验,仿真时对全局序列对齐(global sequence alignment,GSA)[6],DTW和A-DTW算法的检测准确性进行对比,仿真结果如表1所示。 表1 不同用户的FRR和FARTab 1 FRR and FAR of different users 由表中数据可知,A-DTW算法中不同用户的FRR最大为7.73 %且均值为4.40 %,FAR最大为0.76 %且均值为0.33 %,表明算法在身份认证中对真实用户具有很高的识别率,同时对入侵用户也有很高的FRR;GSA算法对不同用户的FRR最大为57.92 %且均值达到30.94 %,FAR均为0,表明该算法在身份认证中对入侵用户有100 %的拒绝率,但是对真实用户的识别率却不高,而且不同用户的FRR差别也较大,为用户的识别带来不便;DTW算法中不同用户的FRR均值为11.32 %,FAR均值为0.78 %,表明该算法对入侵用户有不错的拒绝率,但是对真实用户的识别率效果不好;与GSA算法相比虽然A-DTW算法的FAR没有达到0,但是也达到了1 %以下,基本满足要求,且对真实用户的识别率远远高于GSA算法;与DTW算法相比,A-DTW算法的FRR和FAR有所下降,提高了识别的准确性。综上所述,本文的A-DTW算法能有效的实现手机用户的身份认证,并且提高了身份认证的识别率。 本文提出了一种新的基于手机加速度传感器的用户身份认证算法,通过手机加速度采集三维手势数据,经过数据预处理后,采用A-DTW算法和身份认证机制实现身份认证,仿真结果表明:本文的算法具有很高的识别率,并且拥有较高的用户体验度。 [1] Wiengarten F,Humphreys P,McKittrick A,et al.Investigating the impact of e-business applications on supply chain collaboration in the German automotive industry[J].International Journal of Operations & Production Management,2013,33(1):25-48. [2] Ramakrishnan A S,Neff M.Segmentation of hand gestures using motion capture data[C]∥Proceedings of the 2013 International Conference on Autonomous Agents and Multi-agent Systems,International Foundation for Autonomous Agents and Multiagent Systems,2013:1249-1250. [3] 徐 鹏.基于PSO-BP算法的规范手写体数字离线识别[J].传感器与微系统,2009,28(9):9-11. [4] Guo Y,Yang L,Ding X,et al.OpenSesame:Unlocking smart phone through handshaking biometrics[C]∥2013 Proceedings IEEE INFOCOM,2013:365-369. [5] Conti M,Zachia-Zlatea I,Crispo B.Mind how you answer me!:Transparently authenticating the user of a smartphone when answering or placing a call[C]∥Proceedings of the 6th ACM Symposium on Information,Computer and Communications Security:ACM,2011:249-259. [6] Guerra-Casanova J,Sánchez-vila C,de Santos Sierra A,et al.Score optimization and template updating in a biometric technique for authentication in mobiles based on gestures[J].Journal of Systems and Software,2011,84(11):2013-2021. [7] Lin C C,Liang D,Chang C C,et al.A new non-intrusive authentication method based on the orientation sensor for smartphone users[C]∥2012 IEEE Sixth International Conference on Software Security and Reliability(SERE):IEEE,2012:245-252. [8] Liu D,Ge Y J,Zhang X Y.On-line signature verification utilizing 3-axis force features extraction based on DTW[J].Applied Mechanics and Materials,2013,241:2990-2995. [9] Guo J K,Doermann D,Rosenfeld A.Local correspondence for detecting random forgeries[C]∥1997 Proceedings of the Fourth International Conference on Document Analysis and Recognition:IEEE,1997:319-323. [10] Hofmann F G,Heyer P,Hommel G.Velocity profile based recognition of dynamic gestures with discrete hidden markov models[M]∥Gesture and Sign Language in Human-Computer Interaction.Berlin Heidelberg:Springer,1998:81-95. [11] 陈 文.基于加速度传感器的智能终端手势识别关键技术研究[D].长沙:国防科学技术大学,2011. [12] 李 洋.基于改进DTW算法的嵌入式语音识别系统的实现[D].西安:西安理工大学,2011. A method of 3D gesture identity authentication based on mobile-phone acceleration sensor* WANG Yao, SUN Zi-wen, ZHOU Zhi-ping (School of Internet of Things Engineering,Jiangnan University,Wuxi 214122,China) Aiming at mobile-phone users’security issues,a gesture identity authentication method based on acceleration sensor is proposed.3D gesture data are processed by the mean-variance normalization;and the data of the moving gesture are intercepted by using a threshold value to remove interference data;authentication algorithm adopts template matching method.The authenticity of the user can be determined by the average-dynamic time warping(A-DTW)algorithm through comparing reference template with test template.The simulation results show that the proposed algorithm is convenient,feasible and has a good recognition rate. identity authentication; acceleration sensor; mobile-phone security; gesture recognition 10.13873/J.1000—9787(2014)08—0037—04 2014—01—15 教育部—中国移动科研基金资助项目(MCM20122062); 国家自然科学基金面上项目(61373126); 江苏省自然科学基金面上项目(BK20131107) TP 391 A 1000—9787(2014)08—0037—04 王 尧(1990-),男,江苏丰县人,硕士研究生,主要研究方向为模式识别与智能系统。
3 仿真实验与结果分析



4 结束语
