三维模型几何质量评价方法
2014-06-27李满春
张 雯,程 亮,张 群,李满春
(南京大学江苏省地理信息技术重点实验室,江苏南京 210000)
三维模型几何质量评价方法
张 雯,程 亮,张 群,李满春
(南京大学江苏省地理信息技术重点实验室,江苏南京 210000)
随着三维可视化技术的广泛应用,高精度三维模型在生产应用中具有迫切需求。然而,目前大部分研究集中在如何提取三维空间信息,而对重建后三维模型的质量问题研究相对较少。本文将三维模型分解到基元点、基元线和基元面,提出一种评价三维模型几何质量的方法。以南京大学校园为试验区,针对人工建模获得的三维建筑物模型,随机选取其中30个模型进行质量评价试验。结果表明该研究能有效地对三维模型的几何质量进行定量评价,对人工或自动三维建模作业有重要的指导意义。
几何精度;质量评价;三维模型;可视化技术
一、引 言
三维可视化技术是GIS研究与应用的重要方面之一,其发展极大提高了高精度三维模型的获取能力,也推动着三维模型及三维可视化技术在众多领域的应用。目前,高精细、高逼真的三维模型是许多应用领域迫切需要的,如城市规划、数字地球、公共安全、宣传展示等。三维模型的质量直接影响着模型的最终应用效果和应用范围。如何评价三维模型的质量,以满足不同单位的生产应用需求,是亟须解决的问题。
通过自动或半自动的方法提取建筑物信息从而重建三维模型一直是国内外学者的关注的热点问题,并已有大量深入的研究[1-2]。然而,专门针对模型质量评价的研究相对较少。目前,大部分情况下还是通过主观判断,没有一套较为科学有效的判别方法,其重要原因在于三维模型的构建本身较为复杂,无法通过单一指标来衡量。
高玉荣等探讨了平面地图符号与三维模型的区别与联系,阐述了三维模型的确立、定位、简化描述和逻辑性设计,认为三维模型应该按照一定的原则与规律构建[3]。该研究对三维模型构建质量有一些初步理论想法,但并未给出具体的结论。Mang Lung Cheuk和May Yuan研究了建筑物复杂度等因素对航空LiDAR数据提取三维模型顶部轮廓精度的影响情况[4]。Sander Ouder Elberink和 George Vosselman指出数据源和算法对三维建筑物模型自动提取具有存在一定的影响[5]。以上研究在GIS三维模型评价方面均有一些理论和试验,但多集中于对提取三维模型影响因素的探讨,对三维模型的精度质量缺少具体的评价方法。
本文提出了一种评价三维模型几何质量的方法,以南京大学为试验区针对人工构建的三维建筑物模型进行了测量评价,并对基元点、线、面的精度影响因素作了进一步分析。通过试验,希望能对用户如何评价三维模型的质量起到一定的参考作用。
二、三维模型几何质量评价方法
理想情况下,三维模型应与真实建筑物形状、尺寸等一致。但在实际操作过程中,由于数据源、构建方法等问题,不可避免地会出现一定的误差。为了验证和评价三维建模的几何质量,本文将三维模型分解到基元点、线和面,以局部精度评估整体质量。
1.基元点评价a
点是三维模型最基础的单元,其精度直接反映三维模型精度。以全站仪测量获取建筑物角点坐标作为真值,与三维模型对应的点一一进行比对,获得基元点的精度。
根据真实建筑物的复杂程度,随机选取n个角点,得到三维模型的角点坐标串如下

与之相对应的建筑物真值角点坐标串为

计算得到点与点之间的距离差值为

求取三维模型和真值之间的距离偏移的均值a,即三维模型基元点的精度值

2.基元线评价
线的种类多样,如样条曲线等。本文仅讨论可由两个端点确定的最基本的直线段。
(1)长度差值b
设三维模型中获取线段 LA端点坐标分别为A1(x1,y1,z1)、A2(x2,y2,z2),则LA长度值

同时获取相对应的实际测量真值LB的长度值,比较两条线段的长度差异情况。
随机选择n条建筑物基元线,最好为比较明显的轮廓边缘线,求取平均值,获得建筑物三维模型基元线的距离偏移值

(2)距离偏移c

随机选取n条基元线计算距离差值,求取平均值即为基元线的距离偏移c

(3)角度偏移d
在三维空间中构建的三维模型的线元与真实情况下的线元可能为平行、相交或者不相交。测量两条基元线夹角作为几何模型线元的角度偏移值d。设
则LA与LB之间的夹角θ∈(0,90°]为

随机选择n条基元线,求取平均值即为三维模型基元线的角度偏移d
3.基元面评价
本文仅考虑用控制点坐标即可表示的平面,不包括需要用曲率、弧度等来描述的特殊曲面。若实际情况中,基元面的评价需精确到边或点,可进行分解,参照基元点与基元线的评价方法[6]。
(1)边数累积差值e
按照从整体到局部的思路,一般先选择面积较大的轮廓面,然后是局部的窗口轮廓,细部轮廓平面等。随机选取模型基元面A,并在真实建筑物中找到相对应的面B。比较面A的边数EA与面B的边数EB差值。选择n个基元面,统计累计边数差值作为该栋建筑物的边数差e

(2)面积差值f
面积是基元面特有的特征因素,可以直观描述面与面之间的差异。通过控制点坐标Pi(xi,yi,zi) (i=1,2,…,n)计算面积公式为

随机选取n个多边形,计算三维模型基元面A的面积SA和真实建筑物相对应的多边形B面积SB,求取两个多边形面积差值的平均值作为三维模型的面积差值f

(3)两面距离g
选取n个基元面,通过测量基元面A每个控制点坐标Ai(xi,yi,zi)(i=1,2,…,k)到真值基元面B的距离的均值作为该栋建筑物三维模型基元面的距离偏移值g

(4)两面夹角h
三维模型的基元面A

设其法向量为

任意选取基元面A的3个控制点坐标A1、A2、A3,得到

求解得到法向量m。同理求出基元面B

法向量为
根据三维空间两条直线的向量夹角公式可得法向量m与n的夹角θ∈(0,90°]为

随机选择三维模型n个基元面,求取平均值作为该栋建筑物基元面的角度偏移h
三、试验与分析
1.试验对象
本文以南京大学校园为试验区,在以激光雷达数据为基础数据源,人工建模获得的106个高精度三维建筑物模型中,随机抽样选取了30个进行试验分析。南京大学三维建筑物模型如图1所示。以全站仪实地测量获取建筑精确尺寸信息作为真值,对三维建模几何质量进行评价。

图1 南京大学三维建筑物模型整体图
2.三维模型几何质量评价
根据上文方法,对模型和建筑物进行测量计算,每个对象随机选取8个角点、4条线段和4个多边形。计算后误差数据见表1。
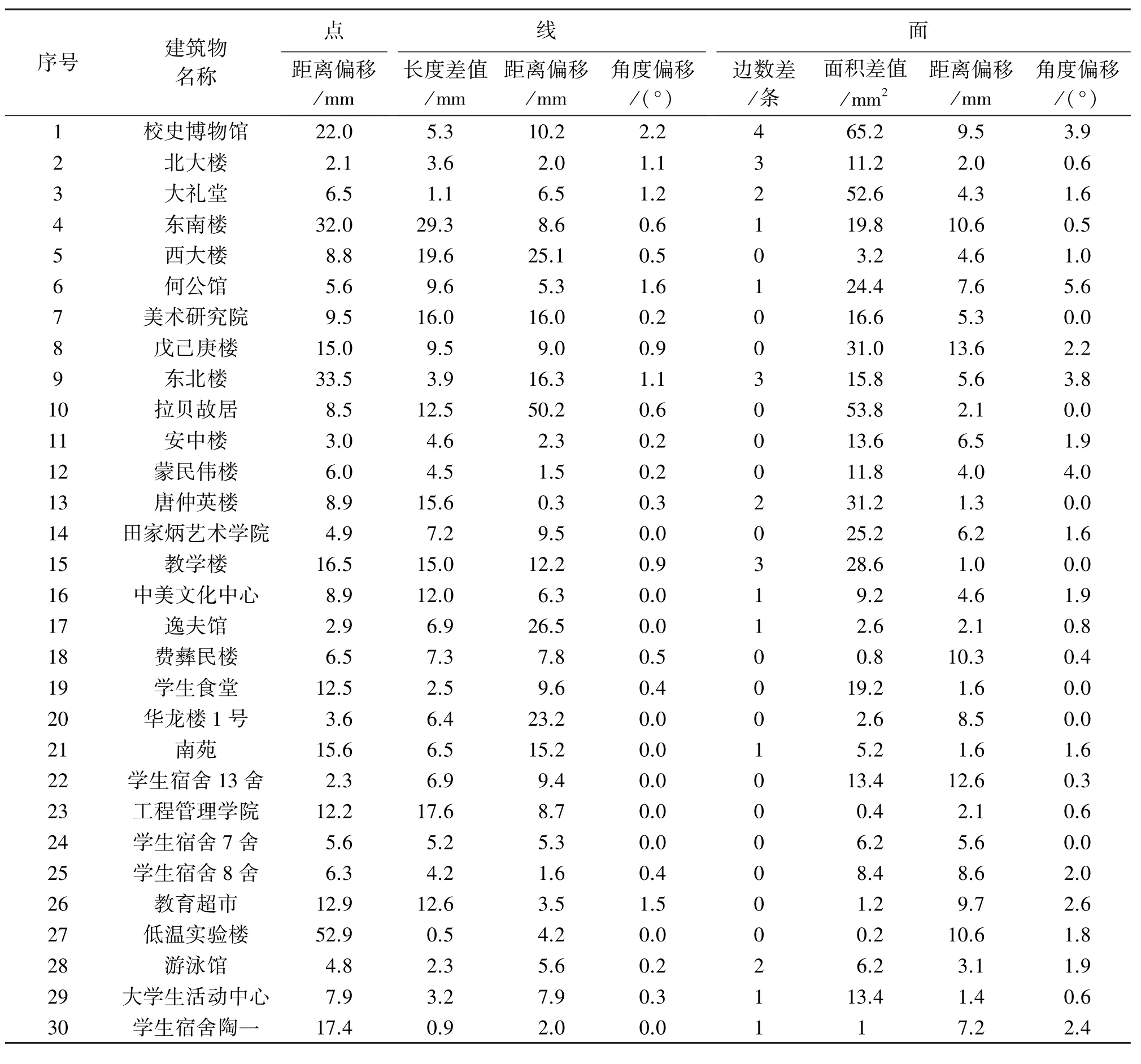
表1 三维模型几何质量评价误差统计表
(1)基元点分析
分析表 1,有 3个模型的点距离偏移在 2~5.5 cm中间,其余均小于2 cm。总体点距离偏移的平均值为1.18 cm,精度较高。
通过对比不同位置的角点误差可以发现,由三个面相交构成的角点最为精确,其位置易识别。位于两个相交平面构成线段端点的基元点精度次之。位于建筑物单一平面轮廓边缘线上的端点,精度较低,因为仅有一个面作为参照,容易出现数据缺失、噪声数据较多的情况,尤其是对一些高程值比较大的角点。
(2)基元线分析
基元线评价中,30个模型的平均长度差值均小于2 cm,总体平均值0.84 cm;距离偏移大部分小于2 cm,有个别建筑物的线距离误差达到了5 cm,与真值偏移较大,总体平均偏移为1.03 cm;因为建筑物大部分都是规整的形状,基元线多为横平竖直,整体角度偏移均较小,仅为0.56°。
由单一平面的边缘构成的线段,一般情况下为三维模型的外边缘轮廓线,数据噪声多,解译精度低。而由两个平面相交形成的基元线,则可识别性较高,但其精度与两个相交面的大小和角度有关。通过结合建筑物线元的一些基本特点,例如垂直线一般为铅垂线,规则排列的线段一般为平行或垂直等,可有效保证三维模型基元线的精度。
(3)基元面分析
在基元面的评价中,有16个模型边数与实际情况一致,部分结构复杂的建筑物,出现了较大边数差值;面积差值大部分小于3 cm2,只有4个模型面积差值在 3~6.5 cm2之间,总体平均面积差值为1.65 cm2;建筑物基元面总体距离偏移均值仅为0.59 cm,角度偏移均值1.52°,其中有7个三维模型的基元面角度偏移为0,说明三维模型与真实情况的多边形重叠度基本一致。
基元面的误差精度与其形状和面积有关。若形状规整,面积轮廓较大,则解译精度较高;相反则精度相对较低。
四、结束语
本文提出了一种三维模型几何质量评价方法,将三维模型分解到基元点、线和面,用随机采样的方法,以局部评估整体,并对高精度三维模型几何质量进行了试验分析,针对不同位置的点线面要素的精度作了进一步研究分析。该研究能有效地对三维模型的几何质量进行定量评价,对人工或自动三维建模作业有重要的指导意义。
[1] 熊友谊,冯志新,陈颖彪,等.利用点云数据进行三维可视化建模技术研究[J].测绘通报,2012(5):20-23.
[2] 陈卓,马洪超.基于机载LiDAR数据的大型立交桥自动提取与建模方法[J].测绘学报,2012,41(2):252-258.
[3] 高玉荣,朱庆,应申,等.GIS中三维模型的视觉变量[J].测绘科学,2005(3):41-43.
[4] CHEUK M L,YUAN M.Assessing Spatial Uncertainty of LiDAR-derived Building Model:a Case Study in Downtown Oklahoma City[J].Photogrammetric Engineering&Remote Sensing,2009,74(12):257-270.
[5] OUDE ELBERINK S,VOSSELMAN G.Quality Analysis on 3D Building Models Reconstructed from Airborne Laser Scanning Data[J].Journal of Photogrammetry and Remote Sensing,2011,66(2):157-165.
[6] 塔怀锁,吴翠兰.空间两条异面直线最短距离的讨论[J].北京工业职业技术学院学报,2010(2):92-94.
[7] NEBIKER S,BLEISCH S,CHRISTEN M.Rich Point Clouds in Virtual Globes—A New Paradigm in City Modeling?[J]Computers,Environment and Urban Systems,2010,34(6):508-517.
[8] KOKKAS N.An Investigation into Semi-automated 3D City Modelling[D].Nottingham:University of Nottingham,2008.
[9] YOU R J,LIN B C.A Quality Prediction Method for Building Model Reconstruction Using LiDAR Data and Topographic Maps[J].IEEE Transactions on Geoscience and Remote Sensing,2011,49(9):3471-3480.
[10] 孙轩,杨必胜,李清泉.基于体元分析的三维建筑物模型结构化分割方法[J].测绘学报,2011,40(5):582-586.
An Evaluation Method for the Geometry Quality of Three-dimensional Models
ZHANG Wen,CHENG Liang,ZHANG Qun,LI Manchun
P208
B
0494-0911(2014)07-0044-04
2013-04-22
国家自然科学基金(41001238)
张 雯(1988—),女,江苏南京人,硕士生,研究方向为三维地理信息系统与可视化技术。
张雯,程亮,张群,等.三维模型几何质量评价方法[J].测绘通报,2014(7):44-47.
10.13474/j.cnki.11-2246.2014.0222
