利用PCA-BP算法进行激光点云分类方法研究
2014-06-27李广云李明磊王石岩
张 蕊,李广云,李明磊,王石岩
(1.信息工程大学导航与空天目标工程学院,河南郑州 450001;2.华北水利水电大学软件学院,河南郑州 450011;3.河南省基础地理信息中心,河南郑州 450003)
利用PCA-BP算法进行激光点云分类方法研究
张 蕊1,2,李广云1,李明磊1,王石岩3
(1.信息工程大学导航与空天目标工程学院,河南郑州 450001;2.华北水利水电大学软件学院,河南郑州 450011;3.河南省基础地理信息中心,河南郑州 450003)
在阐述现有激光点云分类技术的基础上,为满足高精度、高速度、高可靠性、自动化的数据处理要求,着重研究了基于主成分分析(PCA)和BP神经网络的激光点云分类方法,并通过真实激光扫描数据进行试验,将建筑物和树叶有效分类,达到了预期效果。
激光点云;数据处理;主成分分析(PCA);BP神经网络;点云分类
一、引 言
随着三维激光扫描技术的普及和发展,空间数据的获取从传统的单点数据采集向连续的、密集型自动数据获取技术转变,从而大大增加了数据采集量,提高了效率,使专业技术人员突破了传统的数据处理模式,改进了数据处理理论和方法;尤其对于由激光扫描获取的海量点云数据的后期处理,迫切需要高精度、高速度、高可靠性、自动化的数据处理技术,以满足稳定高效的数据处理要求,这不仅是测绘领域热衷的研究方向,同时由于图形、图像处理技术和大数据处理技术等渗透其中,也成为计算机领域近年来研究的热点。
点云分类是三维激光扫描数据处理的重点和热点问题,也是点云数据处理的一项关键工作。而人工神经网络具有许多优良特性,如具有较强的容错性,能够识别带有噪声的数据;具有较强的自适应学习能力;采用并行工作方式,匹配速度快等。这些特性对解决海量激光点云分类问题是非常适合的。
二、现有激光点云分类技术
激光扫描点云中既含有地面点又包含地物点,若要进行地物的提取和建筑物的三维重建,需要将植被、电线杆、建筑物、道路等进行区分,得到不同类型的点云系列,即激光扫描点云数据的分类。
目前,对于激光点云分类的研究主要体现在道路、植被和建筑物的提取等几个方面,大部分的研究都是针对其中一个方面进行的。如在植被提取方面,文献[1]使用 LiDAR数据生成距离图像,然后使用图像处理的方法提取植被;文献[2]采用区域增长和梯度分割的方法来提取树木;文献[3]通过SVM分类实现城区植被的识别;关于建筑物的提取,文献[4]利用强度信息和高程进行数据分类和分割,利用多次回波进行数据分类,先将植被提取出来,为分割相互毗邻的房屋和树木提供了一种有效的途径;文献[5]采用逐级分类的策略,先将点云数据分为地面点和非地面点,对于非地面点,首先将影像与点云数据套合,将影像的光谱信息赋予点云,根据光谱信息提取出光谱特征较为明显的植被,然后在剩余的点云中利用高程纹理提取出建筑物,最后根据回波次数提取剩余植被点云。
除了常用的激光点云分类算法,还可利用专业的激光雷达点云数据处理软件,如TerraScan、LASEdit等。其中TerraScan软件是国内外处理激光扫描点云数据的主要软件,可以完成海量点云数据的读取、分类、处理、建模等相关工作。对于分类,可以完成对建筑物、电线、植被等点云的自动分类提取[6]。如需要专业模块,也可以人工手动提取,但工作量巨大。
以上分类算法一般都是半自动或人工操作方式,计算量大,处理过程复杂。在研究现有激光点云分类技术的基础上,本文提出先根据主成分分析(principal component analysis,PCA)得到不同地物点在三维空间的几何特征分布,然后将其特征送入神经网络进行训练,构建神经网络模型,最后通过该模型对激光点云进行分类。本文把其命名为PCA-BP点云分类算法。
三、PCA-BP激光点云分类算法
基于PCA-BP算法的激光点云数据分类算法包括主成分分析、BP神经网络构建、BP神经网络训练及BP神经网络分类4个步骤,其算法流程如图1所示。
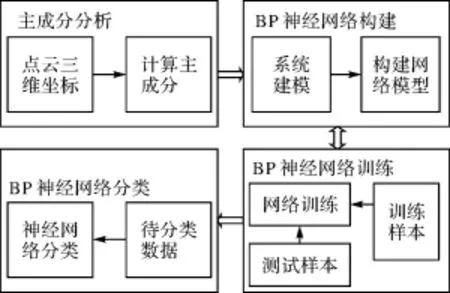
图1 PCA-BP算法流程
1.主成分分析
主成分分析是一种数学变换的方法,又称主分量分析或矩阵数据分析,是指当变量之间存在一定的相关关系时,将相关变量通过线性组合变换成另一组不相关的变量,这些新的变量按照方差依次递减的顺序排列。在数学变换中保持变量的总方差不变,使第一变量具有最大的方差,称为第一主成分,第二变量的方差次大,并且和第一变量不相关,称为第二主成分,依次类推。
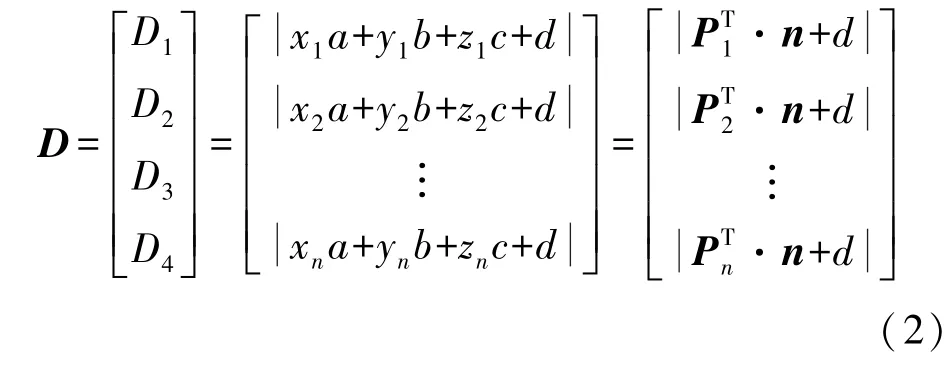
基于主成分分析的点云分类使用扫描点的空间分布统计对点云局部几何特征进行描述。对于平面点集

激光点云几何特征的分布通过构造协方差矩阵(公式(4))并对该矩阵进行主成分分析得到。三维点集的协方差矩阵为三阶,共3个主成分,从主成分的几何意义出发,第一和第二主成分代表曲面上的主趋势,第三主成分(最小主成分)代表了三维表面法向方向的趋势(平面度越好的点集第三主成分越接近零),如图2所示。
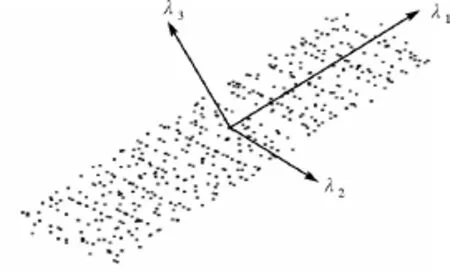
图2 主成分对应特征向量几何示意图
不同地物的扫描点在三维空间中呈不同的分布形态。为了得到扫描点的统计描述信息,对式(4)所示的协方差矩阵进行主成分分析得到按降序排列的特征值λ1≥λ2≥λ3[8]。若被扫物体为树叶,则三个主成分满足 λ1≈λ2≈λ3,见表1;若被扫物为墙面,则有λ1,λ2≥λ3,见表2。
2.BP神经网络模型的率定
BP(back propagation)神经网络是一种基于误差反向传播算法多层前馈神经网络,其具有分层结构,信息从输入层传递到隐含层,逐层向前传递,最后到输出层,除输入层之外,每一层的输入是上一层的输出,如果输出层的实际输出与期望输出不符,则误差反向传播,即输出误差以某种形式通过隐含层向输入层逐层反传,并将误差分摊给各层的所有单元,以该误差为依据对网络权值和阈值进行调整。信号正向传播与误差反向传播的各层权值调整过程,周而复始地进行,该过程就是神经网络的学习训练过程,一直进行到网络的输出误差减少到可接受的程度,或进行到预先设定的学习次数为止[9]。
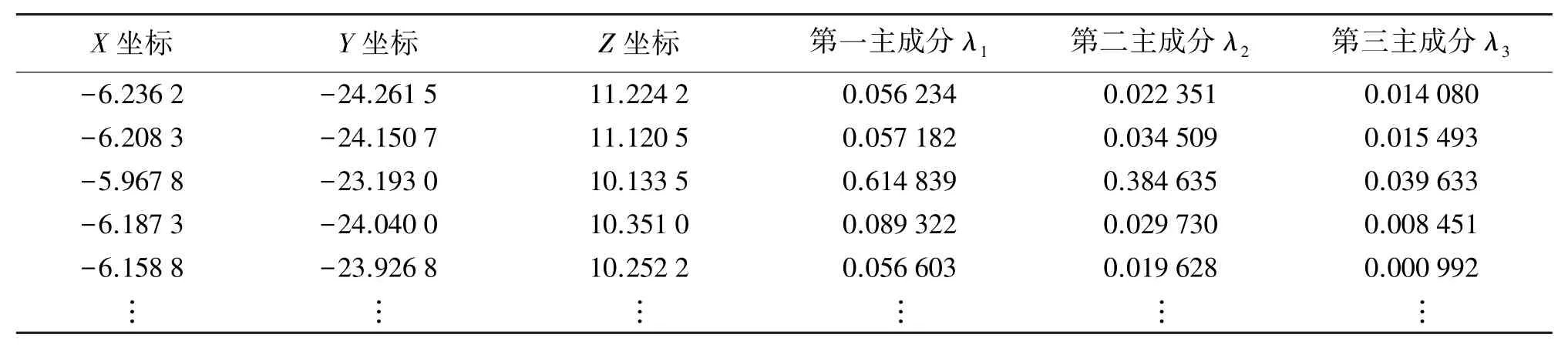
表1 树叶激光点云三维坐标及主成分示例
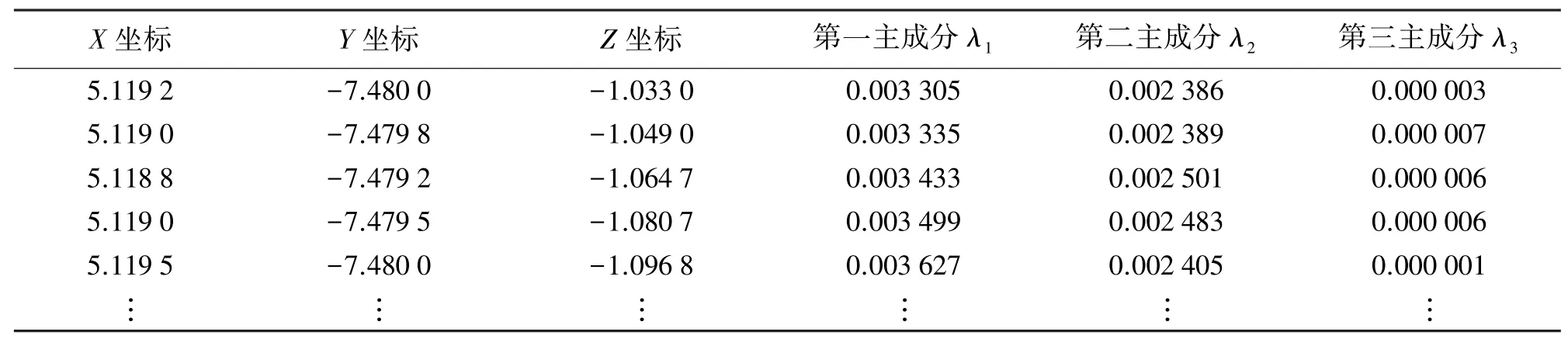
表2 面状激光点云三维坐标及主成分示例
本文采用的BP神经网络结构如图3所示。其中,λ1、λ2、λn是BP神经网络的输入;Y1、Ym是 BP神经网络的预测输出;ωij和ωjk为权值;N、M、L分别表示输入层、隐含层和输出层神经元的个数。由于表示点云空间几何特征的输入信息为三维,待分类的点云共有2类,因此本文采用的BP神经网络结构为3-4-2,即输入层有3个节点,隐含层有4个节点,输出层有2个节点。
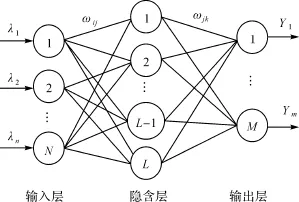
图3 BP神经网络结构
四、试验结果与分析
本文试验所用数据为自新校区幼儿园室外扫描数据,包含有2 151 693个扫描点,通过地面激光扫描仪采集获得。计算机硬件环境为 Intel Core i5 CPU 2.6 GHz,内存为8 GB,软件环境为Win7、Matlab7.0、VS2012和PtCloudPro。试验步骤如下:
1)主成分分析。对式(4)所示的协方差矩阵进行主成分分析得到3个特征值λ1、λ2、λ3。
2)为训练样本增加类别标识。由于树叶点和平面点3个主成分之间的关系有显著差异,依此给两类点云增加类别标识1和0,其中标识为1的点为平面点,标识为0的点为树叶点。
3)建立BP神经网络模型。经过反复试验和验证,最终采用newff建立一前向BP网络,训练函数为 trainlm,隐含层传递函数为 logsig,学习率为0.05,训练步数为50 000,训练目标误差为1e-6。
4)训练神经网络。把平面样本和树叶样本进行合并,随机选取部分数据作为训练样本,其余作为测试样本,λ1、λ2、λ3作为输入,1、0组成的矩阵作为输出,对神经网络进行训练,当在指定的训练次数范围之内达到指定的目标,训练成功。
5)点云分类。将待分类样本输入已训练好的BP网络,根据输出的值1或0确定是平面点或树叶点。分类效果如图4所示,从图4(a)和(b)可以看出,建筑物点云与树叶点云基本分开。
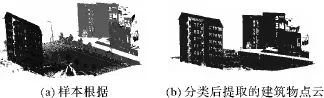
图4 分类前后效果图
五、结束语
本文提出的基于PCA-BP算法的激光点云分类方法,首先根据协方差矩阵由点云三维坐标计算出3个主成分,然后依此对BP神经网络进行训练,最后用训练好的网络对待分类点云进行分类,试验结果表明该方法能有效地将地物点云(建筑物和树叶)进行分类。BP神经网络具有很强的自学习能力,能够通过大量的训练样本,自动对权值等系数进行调整,直到输出误差达到期望误差为止。但是由于激光点云数据量大,训练和分类大量的数据样本需要很长的时间;另外BP神经网络受经验值影响较大,网络层数、各层神经元个数、传递函数、训练样本的选择等因素都会影响模型的建立和分类的效果,且泛化能力较差,可能会造成漏分和误分的情况。因此,如何对BP神经网络进行改进、选择其他类型的神经网络或与传统分类方法相结合等是下一步要研究的内容。
[1] CHEN G,ZAKHOR A.2D Tree Detection in Large Urban Landscapes Using Aerial LiDAR Data[C]∥16th IEEE International Conference.[S.l.]:IEEE,2009:1693-1696.
[2] 张齐勇,岑敏仪,周国清,等.城区LiDAR点云数据的树木提取[J].测绘学报,2009,38(4):330-335.
[3] 刘峰,龚健雅.基于3D LiDAR数据的城区植被识别研究[J].地理与地理信息科学,2009,25(6):5-8.
[4] 张小红.机载激光扫描测高数据滤波及地物提取[D].武汉:武汉大学,2002.
[5] 龚亮.机载LiDAR点云数据分类技术研究[D].郑州:信息工程大学,2011.
[6] 郑斌,包亚东.车载LiDAR数据的初探[C]∥江苏省测绘学会2011年学术年会论文集.[S.l.]:江苏省测绘学会,2011.
[7] 王学民.应用多元分析[M].2版.上海:上海财经大学出版社,2004:232-238.
[8] 梁玉斌.面向建筑测绘的地面激光扫描模式识别方法研究[D].武汉:武汉大学,2013.
[9] 施彦,韩力群,廉小亲,等.神经网络设计方法与实例分析[M].北京:北京邮电大学出版社,2009.
[10] 龚俊,柯胜男,朱庆,等.一种八叉树和三维R树集成的激光点云数据管理方法[J].测绘学报,2012,41 (4):597-604.
Classification of LiDAR Point Clouds Based on PCA-BP Algorithm
ZHANG Rui,LI Guangyun,LI Minglei,WANG Shiyan
P234.5
B
0494-0911(2014)07-0023-04
2014-04-08
国家自然科学基金(41274014)
张 蕊(1980—),女,河南濮阳人,博士生,研究方向为激光点云数据处理、大数据处理。
张蕊,李广云,李明磊,等.利用PCA-BP算法进行激光点云分类方法研究[J].测绘通报,2014(7):23-26.
10.13474/j.cnki.11-2246.2014.0217
