基于TTR的汽车侧翻预警研究
2014-06-27陈毅华徐健康毛建国金智林
陈毅华,徐健康,毛建国,金智林
(1.南京航空航天大学能源与动力学院,南京 210016; 2.南京长江电子信息产业集团有限公司,南京 210038)
基于TTR的汽车侧翻预警研究
陈毅华1,徐健康2,毛建国1,金智林1
(1.南京航空航天大学能源与动力学院,南京 210016; 2.南京长江电子信息产业集团有限公司,南京 210038)
提出了一种基于TTR的汽车侧翻预警算法。建立了3自由度线性汽车侧翻模型,推导了基于汽车侧倾角度变化的TTR侧翻预警计算公式,提出了TTR侧翻预警算法。以某轻型卡车为研究对象进行了汽车侧翻过程中侧倾角变化的仿真分析,获得了TTR侧翻预警算法的汽车侧翻预警时间。仿真结果表明:该侧翻预警算法能准确地对汽车侧翻时间进行预测,从而为汽车侧翻预警控制器开发提供理论依据。
汽车侧翻;侧翻预警;汽车主动安全
汽车侧翻是一个重要的交通安全问题。根据美国公路安全局(NHTSA)的数据统计,汽车侧翻事故的危害程度仅次于汽车碰撞事故,居第2位[1]。由于汽车侧翻时,驾驶员感觉不到具体征兆而来不及采取有效措施,使得汽车侧翻事故的危害是致命的,因此汽车侧翻已经成为全世界关注的安全问题,越来越受到重视。
近年来国内外学者对汽车侧翻进行了大量的研究,提出了主动横向稳定杆[2]、主动转向[3]、主动悬架[4]和主动制动[5-6]等抗侧翻措施。但是这些抗侧翻措施都是在侧翻危险已经产生时才开始执行,可以减少侧翻的可能性却不能预见侧翻事件,所以不能给驾驶员或侧翻控制系统提供足够早的预警信号来指导其采取有效的措施。侧翻预警研究的目的是如何在侧翻危险将要发生但是还没有开始时预见到侧翻危险,并给驾驶员或侧翻控制系统提供参考信号。侧翻预警研究主要有基于模型和基于检测2种方法。基于模型的方法首先要建立一个能够准确反映汽车侧翻过程的模型,然后根据当前状态通过模型计算出未来一段时间侧翻判别因子的值,当这个值第1次超过侧翻阈值时记下这一时刻,即得到侧翻预警时间。利用这种方法建立的模型能准确反映实际侧翻过程时可以达到很高的预警精度,但由于需要短时间内进行大量重复的复杂运算,其实时性很难保证。另一种基于参数检测方法是在当前瞬间对汽车运行参数进行检测,通过侧翻预警算法对当前参数进行运算得到侧翻预警时间。这种方法运算速度快,适合工程应用,通过选择合适的预警算法可以获得较高的精度。本文根据已经成功应用于汽车产品的防撞预警及TTR侧翻预警方法建立能准确预警侧翻的基于参数检测的侧翻预警模型,并选取典型工况进行仿真分析。
1 3自由度线性汽车侧翻模型
侧翻模型是研究汽车侧翻预警算法的基础,因此建立一个简单且能精确反映汽车侧翻性能的模型对于预警算法的设计至关重要。本文建立了如图1所示的3自由度线性汽车整车侧翻模型。该模型比较简单,且能够反映汽车侧翻的一般规律。
该模型忽略汽车纵向和俯仰方向的动力学特征,并假设汽车左右轮动力学特性关于x轴是对称的,即该模型由“自行车模型”和侧倾平面模型组成,包括y方向的平动横向运动、绕z轴的转动横摆运动,以及绕x轴的转动侧倾运动。在轮胎相对汽车转角很小的情况下,对于每个侧翻预警计算时刻,汽车质心速度u近似为一个常数,则汽车侧翻模型的动力学方程为:
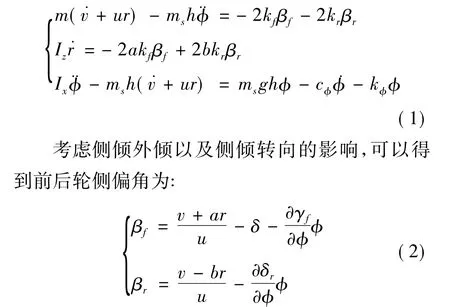

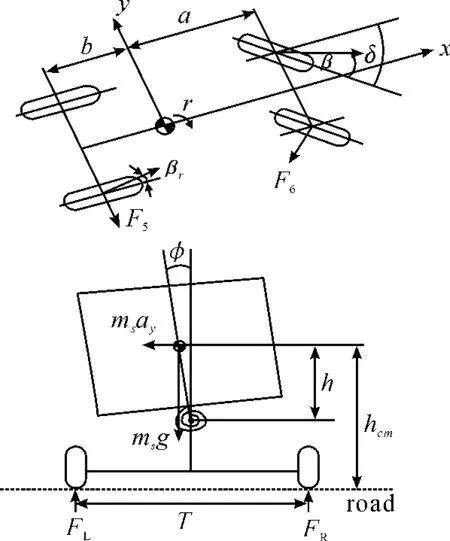
图1 汽车侧翻模型
2 汽车侧翻预警算法
2.1 TTR基本概念
汽车侧翻是指汽车在行驶过程中绕其纵轴线转动90°或更大的角度,以至车身与地面相接触的一种危险的侧向运动。在侧翻研究中可以将车身侧倾到一边轮胎与地面作用力为0时的汽车侧倾角定义为TTR的侧翻参考角,即侧翻阈值。TTR (time-to-rollover)意义为到距离侧翻的时间,在本文中TTR的精确定义为汽车继续保持当前状态行驶时将要侧翻的时间。
在发生侧翻事件后,如果回放整个侧翻过程,在侧翻前的第N s时刻,此时的实际TTR值为N s,也就是在此刻过后的第N s侧倾角将超过侧翻阈值。假设在侧翻前对TTR值的预测绝对准确的话,将得到一条在TTR值和时间值平面内的斜率为-1的直线,如图2所示。
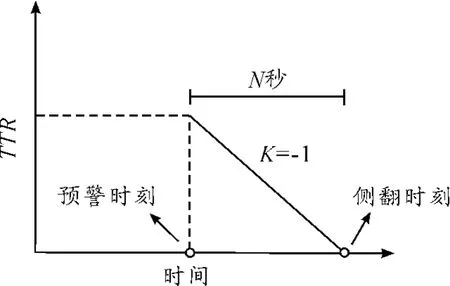
图2 理想的TTR侧翻预警
2.2 TTR算法
TTR对汽车进行x轴横截面内的动力学预警,TTR定义为汽车继续保持当前的横向侧倾角加速度运动时将要发生侧翻的时间,如图3所示。如果在某时刻预见到汽车在足够长的时间内,例如X s内不会发生侧翻,就可以认为汽车不会侧翻。此X s被定义为侧翻预警上限时间,当TTR侧翻预警值超过X,X被设定为TTR值。
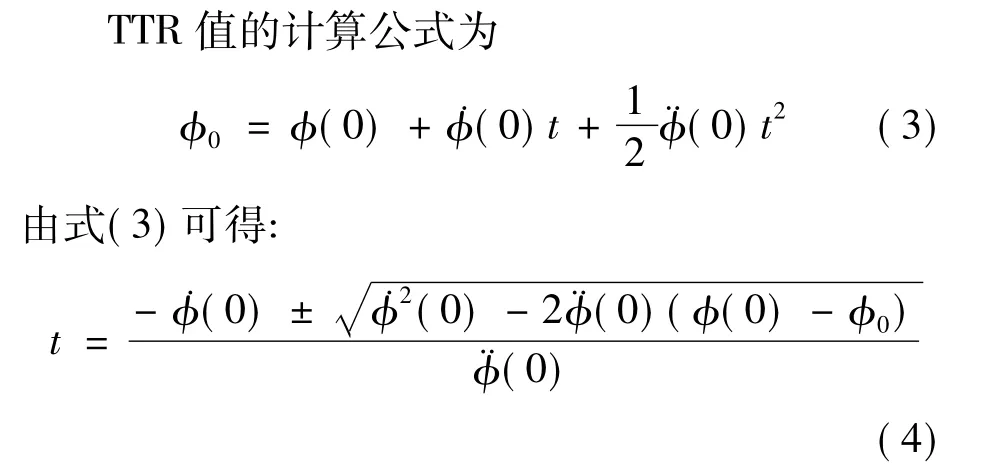
其中:φ0为TTR侧翻阈值,根据汽车参数确定(汽车侧翻过程中车身侧倾到一边轮胎与地面作用力为0时的汽车侧倾角定义为 TTR侧翻阈值); φ(0)为汽车当前的侧倾角度;t为汽车侧翻预警时间;X为侧翻预警的上限时间。
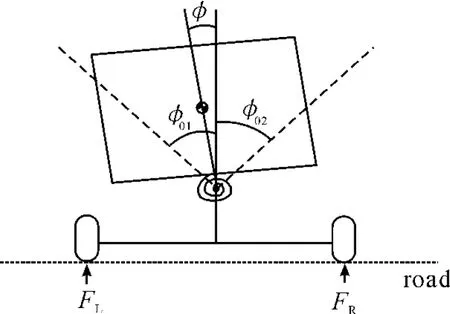
图3 汽车侧翻预警示意图
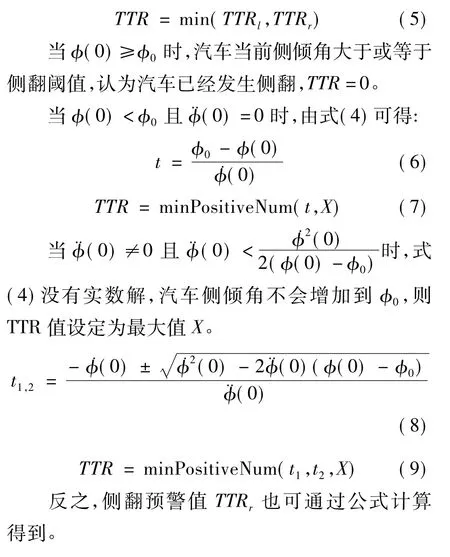
设定汽车逆时针侧倾为正向,正向侧倾角为正,如图3所示。正向侧倾TTR侧翻阈值为φ0l,汽车顺时针侧倾为反向,反向侧倾角为负;反向侧倾TTR侧翻阈值为φ0r。φ0l和φ0r根据汽车相关参数确定,φ0r=-φ0l。由于汽车在行驶过程中正反方向的侧翻均有可能,因此,侧翻预警值TTR应取正向侧翻预警值TTRl和反向侧翻预警值TTRr之间的最小值,即
3 某轻型卡车侧翻预警仿真
选取某轻型卡车作为侧翻预警仿真对象,卡车参数见表1。
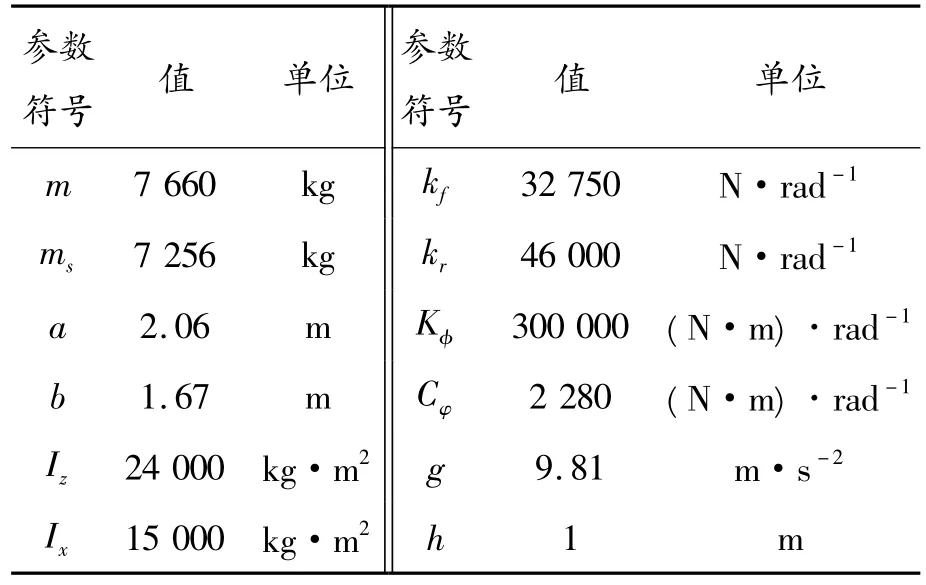
表1 卡车参数表
选取汽车最坏操作情况转角变化作为侧翻仿真模型的输入,汽车最坏操作转角变化如图4所示。汽车方向盘正反方向不停地做类似阶跃转动,车速设定为30 m/s,φ0l=10°,φ0r=-10°,X= 3 s。汽车侧倾角如图5所示,TTR侧翻预警如图6所示。
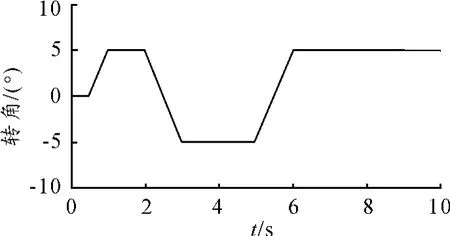
图4 汽车最坏操作情况转角输入
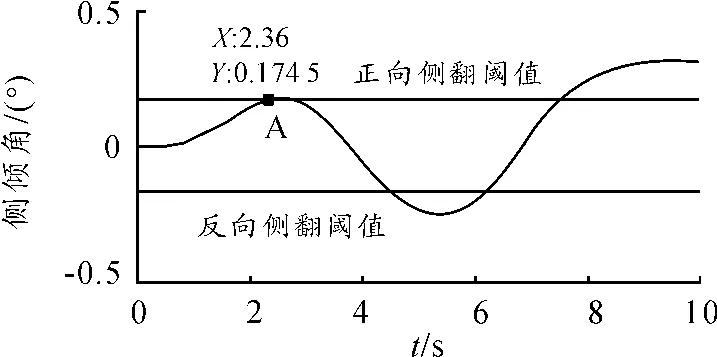
图5 汽车侧倾角变化
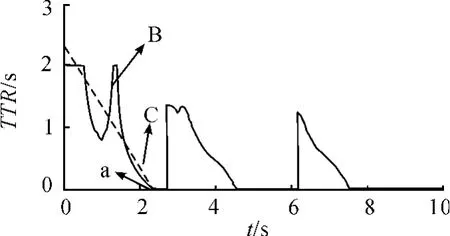
图6 TTR侧翻预警结果
汽车在A点(图5)发生侧翻,侧翻时间为2.36 s。TTR侧翻预警模块预测到汽车在a点(图 6)发生侧翻,计算得到的TTR值为2.36 s,与实际侧翻时间吻合。
在侧翻危险区间C区(图6),实际侧翻时间在0~1 s。由图7可知,此间的TTR侧翻预警值曲线近似一条斜率为-1的直线,表明侧翻预警效果较好,此时的TTR值可作为驾驶员和侧翻控制系统的控制信号。在B区由于输入转角信号有不符合现实的突变,导致TTR值在B区形成上下2个突变点,在平滑转角输入信号的突变点使其更符合实际情况后,在B区也有很好的预警效果,非危险区域误差最大只有8.1%,危险区域误差最大为2%,能给驾驶员提供有效的危险信号。如图7所示,基于TTR的侧翻预警模型在整个仿真试验中都能有效地预测侧翻发生的时间。
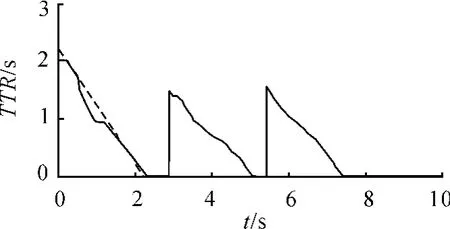
图7 修整输入转角突变点后的TTR侧翻预警效果
4 结论
3自由度线性汽车侧翻模型和TTR侧翻预警模型仿真试验结果表明:根据TTR的侧翻预警方法计算侧翻过程中侧倾角变化,可有效地预测汽车可能发生侧翻的时间,从而为驾驶员和侧翻控制系统提供预警信号,提醒其进行相应处理,以避免汽车发生侧翻。
[1] Traffic safety facts 2009:A compilation of motor vehicle crash data from the fatality analysis reporting system and the general estimates system,National Highway Traffic Safety Administration[Z].US,Department of Transportation,Washington,DC,2011.
[2] Cronje P H,Els P S.Improving off-road vehicle handling using an active anti-roll bar[J].Journal of Terramechanics,2010,47(3):179-189. [3] Imine H,Leonid M,Madani T.Steering control for rollover avoidance of heavy vehicles[J].IEEE Transactions on Vehicular Technology,2012,61(8):3499-3509.
[4] Yu H,Güvenç L,Özgünerü.Heavy duty vehicle rollover detection and active roll control[J].Vehicle System Dynamics,2008,46(6):451-470.
[5] Huang H H,Yedavalli R K,Guenther D A.Active roll control for rollover prevention of heavy articulated vehicles with multiple-rollover-index minimisation[J].Vehicle System Dynamics,2012,50(3):471-493.
[6] 金智林,马翠贞,张甲乐,等.采用电控液压制动系统的SUV防侧翻鲁棒控制[J].重庆理工大学学报:自然科学版,2014,28(1):1-6.
(责任编辑 刘 舸)
Vehicle Rollover Warning Based on TTR
CHEN Yi-hua1,XU Jian-kang2,MAO Jian-guo1,JIN Zhi-lin1
(1.College of Energy and Power Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China;2.Nanjing Changjiang Electronics Group Co.Ltd.,Nanjing 210038,China)
In this paper,a vehicle rollover warning algorithm is proposed.First,a three-DOF linear model of vehicle rollover is established.From the model,the rollover warning algorithm is proposed based on time to rollover(TTR).Also,the TTR value is obtained from the variation of vehicle rollover angel.Then the simulation is conducted for a light truck.And the results show that the rollover warning algorithm can accurately predict the time to rollover,thus providing a theoretical basis for the development of vehicle rollover warning controller.
vehicle rollover;rollover warning;vehicle active safety
U461.91
A
1674-8425(2014)07-0011-04
10.3969/j.issn.1674-8425(z).2014.07.003
2014-03-22
国家自然科学基金资助项目(11202096)
陈毅华(1964—),男,上海人,工程师,主要从事车辆实验学与测试技术研究。
陈毅华,徐健康,毛建国,等.基于TTR的汽车侧翻预警研究[J].重庆理工大学学报:自然科学版,2014 (7):11-14.
format:CHEN Yi-hua,XU Jian-kang,MAO Jian-guo,et al.Vehicle Rollover Warning Based on TTR[J].Journal of Chongqing University of Technology:Natural Science,2014(7):11-14.
