基于动力学仿真的特种车辆操纵稳定性试验方法研究
2014-06-27李军苑士华剧冬梅李瑞英
李军,苑士华,剧冬梅,李瑞英
(1.北京理工大学机械与车辆学院,北京 100081;2.中国兵器科学研究院,北京 100089)
基于动力学仿真的特种车辆操纵稳定性试验方法研究
李军1,2,苑士华1,剧冬梅1,2,李瑞英2
(1.北京理工大学机械与车辆学院,北京 100081;2.中国兵器科学研究院,北京 100089)
为研究和制定特种车辆操纵稳定性试验方法,在参照相关国家标准和国际标准的基础上,针对其具体特点,通过整车动力学建模、操纵稳定性仿真、仿真数据处理及计分评价等多工况全流程的动力学仿真计算,分析确立了特种车辆操纵稳定性试验的关键参数,提出了试验方法。经实车验证试验,表明了试验方法的可行性以及通过动力学仿真手段提出的试验方法可以满足特种车辆操纵稳定性试验和计分评价要求。
兵器科学与技术;特种车辆;操纵稳定性;动力学仿真;试验方法
0 引言
特种车辆一般采用6×6,8×8甚至10×10驱动形式,整车结构复杂、满载质量大、重心位置高,同时要求具备在复杂路面上的高速机动能力和主动安全能力,因此对其整车性能特别是决定车辆高速行驶安全性的操纵稳定性提出了更高的要求[1]。汽车的操纵稳定性是指在驾驶员不感到过分紧张、疲劳的条件下,汽车能遵循驾驶者通过转向系及转向车轮给定的方向行驶,且当遭遇外界干扰时,汽车能抵抗干扰而保持稳定行驶的能力[2]。根据文献[3],影响车辆主动安全性因素的依次排序为:转向的瞬态响应特性、转弯制动性能、直线制动性能、转向的稳态响应特性、视见性、耐颠覆性、抗干扰性、回正性、可靠性。在这9种主要因素中,其中5种因素属于操纵稳定性的范畴,进一步体现了操纵稳定性对车辆主动安全性的重要性。
目前,国内对车辆操纵稳定性的研究主要集中在轿车领域,其建模、仿真、试验、评价等方法相对成熟,并且形成了较为完善的技术体系。但在特种车辆领域的研究基础较为薄弱,由于该领域的特殊性,可借鉴经验较少。需要根据其特点,利用车辆动力学仿真的优势,通过多种工况的多次仿真,得出车辆极限安全状态,归纳和总结出适用于特种车辆的操纵稳定性试验方法。
1 车辆操纵稳定性模型的建立
本文以某型8×8驱动型式的特种车辆为研究对象(车辆参数见表1),使用基于拉格朗日方程方法的多体动力学分析软件ADAMS创建整车模型[4-5]。

表1 某特种车辆主要参数Tab.1 Characteristic parameters of a special vehicle
整车模型由底盘模型、双横臂式前悬架模型(一桥、二桥)、双横臂式后悬架模型(三桥、四桥)、双梯形转向系模型、中央传动系模型、轮胎模型等分系统模型组成(见图1)。其中:发动机和变速箱模型简化为传动系统的动态扭矩输入;驾驶员模型采用预瞄跟随模型[6],其基本系统框图见图 2;轮胎模型采用UA模型,性能参数通过试验获得,试验测试如图3所示。

图1 整车模型组成图Fig.1 Composition of full vehicle model

图2 驾驶员预瞄跟随模型基本结构框图Fig.2 Basic structure of pre-aim and follow driver model

图3 轮胎参数测试试验Fig.3 Parameter testing of tire
整车模型中共有94个物体(不包括地面)、137个约束副,整车系统共有24个自由度,包括底盘的6个自由度、各个悬架上下摆动的8个自由度、转向系统的一个方向盘转动自由度和一个转向系刚度自由度、传动系统中7个差速器的7个自由度和一个扭矩输入的自由度。
2 车辆操纵稳定性仿真和试验
特种车辆的操纵稳定性试验主要包括稳态回转、转向回正、转向轻便性、转向瞬态响应(方向盘转角阶越输入)和蛇形试验等5项试验。
2.1 稳态回转试验仿真和试验
稳态回转试验中的两个关键参数是稳态回转路径半径和车辆最大侧向加速度,其中,稳态回转路径半径在文献[7]中推荐为30 m或40 m,在文献[8]中推荐15 m或20 m,回转半径越大,处理数据时的相对误差就越小,我国相比国际推荐的回转路径小主要是受国内试验场地限制所致。通过稳态回转特性的预仿真分析,车辆在回转半径分别为15 m、20 m、30 m,侧向加速度分别达到2.8 m/s2、3.9 m/s2、5.2 m/s2时,发生后轮侧滑不稳定现象。结合给定试验区域的场地情况,将车辆的回转路径确定为30 m.受车辆具体结构的影响,经过仿真分析,车辆在侧向加速度不大于5 m/s2的范围内,车辆处于稳定状态,因此将车辆的最大侧向加速度确定为5 m/s2.
以此方法为指导的车辆稳态回转试验仿真轨迹见图4,仿真和试验数据曲线见图5~图7.

图4 车辆稳态回转试验仿真的运动轨迹Fig.4 Moving trace of vehiclein steady static circular simulation

图5 车辆转向半径比特性曲线Fig.5 Curves of vehicle steering radius radio
2.2 转向回正试验仿真和试验
转向回正试验的两个关键参数是转向路径半径和最大侧向加速度,参照文献[9],车辆在转向路径上需加速至侧向加速度达到4±0.2 m/s2时,测量车辆的响应特性。因此,车辆的侧向加速度达到4 m/s2是这项试验的关键,根据2.1节,为了保证车辆可以安全圆周行驶至侧向加速度4 m/s2,将圆周半径确定为25 m.
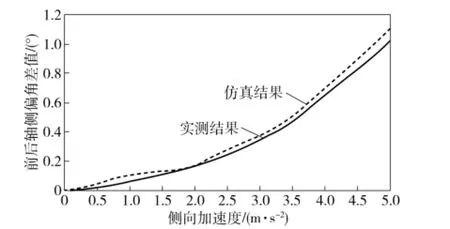
图6 前后轴侧偏角差值特性曲线Fig.6 Difference between vehicle sideslip angles

图7 车身侧倾角特性曲线Fig.7 Curves of vehicle body roll angle
以此方法完成的转向回正试验仿真轨迹见图8,仿真和试验数据曲线,见图9.

图8 车辆转向回正试验仿真的运动轨迹Fig.8 Moving trace of vehicle in steering returnability simulation
2.3 转向轻便性试验仿真和试验
转向轻便性试验的两个关键参数是车辆的稳定速度和双纽线的最小曲率半径。参照文献[10],要求车辆以10 km/h速度在最小曲率半径为汽车最小转弯半径1.1倍的双纽线上行驶一周,通过转向盘作用力矩进行转向轻便性的评价。根据文献[11],汽车最小转弯半径一般是汽车轴距的2~2.5倍。本车最小转弯半径是其轴距的2.06倍,在此设计范围之内,因此,其双纽线的最小曲率半径确定为最小转弯半径1.1倍,即9.5 m;经过仿真计算,车辆以10 km/h速度可以安全地在双纽线上行驶一周,即行驶车速也可以按文献[11]执行。

图9 车辆横摆角速度响应时间历程曲线Fig.9 Curves of vehicle yaw velocity-response time
以此方法完成的转向轻便性试验仿真轨迹见图10,仿真和试验数据曲线见图11.

图10 车辆转向轻便性试验仿真的运动轨迹Fig.10 Moving trace of vehicle in steering efforts simulation

图11 转向盘转向作用力矩时间历程曲线Fig.11 Curves of vehicle steering moment-time
2.4 转向瞬态响应(方向盘转角阶越输入)试验仿真和试验
转向瞬态响应(转向盘转角阶越输入)试验的重要参数是试验车速、转向盘转动起跃时间、侧向加速度。参照文献[12],规定汽车按最高车速70%的试验车速直线行驶,以不大于0.2 s起跃时间转动转向盘至预选位置并固定,使车辆的稳态侧向加速度达到1~3 m/s2.根据车辆性能参数,确定试验车速为110 km/h,根据预仿真计算,转向盘在0.2 s内转至57°时,车辆的稳态侧向加速度达到2 m/s2.
以此方法完成的转向瞬态响应(转向盘转角阶越输入)试验仿真轨迹见图12,仿真和试验数据曲线见图13.

图12 车辆转向瞬态响应试验仿真的运动轨迹Fig.12 Moving trace of vehicle in steering transient response simulation

图13 车辆横摆角速度响应时间历程曲线Fig.13 Curve of vehicle yaw velocity-response time
2.5 蛇形试验仿真和试验
蛇形试验的重要参数是标桩间距和基准车速。参照文献[13],规定汽车以基准车速(50 km/h或60 km/h)进入标桩区(标桩间距50 m),然后蛇行通过6个标桩,记录各测量变量的时间历程曲线及通过有效标桩区的时间。根据车辆的性能参数,确定基准车速为60 km/h.
以此方法完成的蛇形试验仿真轨迹见图14,仿真和试验数据曲线见图15和图16.
3 车辆操纵稳定性计分评价

图14 车辆蛇形试验仿真的运动轨迹Fig.14 Moving trace of vehicle in pylon course slalom simulation

图15 转向盘转角时间历程曲线Fig.15 Curves of steering wheel angle-time

图16 车辆横摆角速度响应时间历程曲线Fig.16 Curves of vehicle yaw velocity-response time
作为新研的特种车型,在没有借鉴经验的情况下,其操纵稳定性试验具有一定的风险性,因此,按照第2节确定的基本试验方法,首先进行操纵稳定性仿真,验证试验方法的可行性和获得初步的车辆性能数据,然后指导完成车辆操纵稳定性的实车测试。按照文献[14],对仿真结果和实车测试结果进行计分评价,见表2.通过表2可以看出,仿真实验与实车测试计分结果基本一致,表明此方法的置信度满足实际使用要求。
4 结论
1)本文建立了基于拉格朗日方程的动力学分析整车模型,针对操纵稳定性每项试验的特点和关键参数,通过模型参数设置、多种工况仿真、每项试验计分评价等全流程工作,分析和确立了多轴特种车辆操纵稳定性的试验方法。
2)经过实车验证试验,多轴特种车辆的操纵稳定性仿真实验与实车测试计分结果基本一致,表明此方法的置信度满足实际使用要求,可用于指导实车操纵稳定性试验和计分评定。

表2 操纵稳定性指标评价(仿真结果和实车试验结果)Tab.2 Evaluation of vehicle handling and stability (simulation and test results)
3)多轴特种车辆的操纵稳定性试验流程在参照文献[8-10,12-13]国家标准的基础上,需要调整试验设置参数,以满足试验和计分评定要求,本文从虚拟仿真实验的角度验证了提出的试验参数设置方法的可行性。
References)
[1] 杜志岐.轮式装甲车总体设计的概念、思路与特点[J].兵工学报,1999,20(11):351-356.
DU Zhi-qi.Wheeled armored vehicle and some of its design aspects[J].Acta Armamentarii,1999,20(11):351-356.(in Chinese)
[2] 余志生.汽车理论[M].北京:机械工业出版社,2011.
YU Zhi-sheng.Theory of automobile[M].Beijing:China Machine Press,2011.(in Chinese)
[3] 佐野彭一.操纵稳定性的评价[J].自动车技术,1980,34(3): 211-219.
ZUO-YE Peng-yi.Evaluation of vehicle handling[J].Journal of Society of Automotive Engineers of Japan,1980,34(3):211-219.(in Japanese)
[4] 李军,邢俊文,覃文浩,等.ADAMS实例教程[M].北京:北京理工大学出版社,2002.
LI Jun,XING Jun-wen,QIN Wen-hao,et al.ADAMS living example course[M].Beijing:Beijing Institute of Technology Press, 2002.(in Chinese)
[5] 孟红,项昌乐,孙旭光,等.轮式装甲车辆不同差速器方案操纵稳定性仿真研究[J].兵工学报,2009,30(3):262-267.
MENG Hong,XIANG Chang-le,SUN Xu-guang,et al.Simulation research on wheeled armored vehicle operating stability in differentialmechanism schemes[J].Acta Armamentarii,2009, 30(3):262-267.(in Chinese)
[6] 郭孔辉,潘峰,马凤军.预瞄优化神经网络驾驶员模型[J].机械工程学报,2003,39(1):26-29.
GUO Kong-hui,PAN Feng,MA Feng-jun.Preview optimized artificial neural network driver model[J].Chinese Journal of Mechanical Engineering,2003,39(1):26-29.(in Chinese)
[7] ISO 4138—2012乘用车·稳态环行驾驶·开环试验方法[S].北京:中国标准出版社,2012.
ISO 4138—2012 Passenger cars·steady-state circular driving behaviour·open-loop test methods[S].Beijing:China Standards Press,2012.(in Chinese)
[8] GB/T 6323.6—1994汽车操纵稳定性试验方法稳态回转试验[S].北京:中国标准出版社,1994.
GB/T 6323.6—1994.Controllability and stability test procedure for automobiles—steady static circular test procedure[S].Beijing:China Standards Press,1994.(in Chinese)
[9] GB/T 6323.4—1994汽车操纵稳定性试验方法转向回正性能试验[S].北京:中国标准出版社,1994.
GB/T 6323.4—1994 Controllability and stability test procedure for automobiles—returnability test[S].Beijing:China Standards Press,1994.(in Chinese)
[10] GB/T 6323.5—1994汽车操纵稳定性试验方法转向轻便性试验[S].北京:中国标准出版社,1994.
GB/T 6323.5—1994 Controllability and stability test procedure for automobiles—steering efforts test procedure[S].Beijing:China Standards Press,1994.(in Chinese)
[11] 刘惟信.汽车设计[M].北京:清华大学出版社,2006.
LIU Wei-xin.Automobile design[M].Beijing:Tsinghua University Press,2006.(in Chinese)
[12] GB/T 6323.3—1994汽车操纵稳定性试验方法转向瞬态响应试验(转向盘角脉冲输入)[S].北京:中国标准出版社, 1994.
GB/T 6323.3—1994 Controllability and stability test procedure for automobiles—steering transient response test(steering wheel angle pulse input)[S].Beijing:China Standards Press,1994. (in Chinese)
[13] GB/T 6323.1—1994汽车操纵稳定性试验方法蛇形试验[S].北京:中国标准出版社,1994.
GB/T 6323.1—1994 Controllability and stability test procedure for automobiles—pylon course slalom test[S].Beijing:China Standards Press,1994.(in Chinese)
[14] QC/T 480—1999汽车操纵稳定性指标限值与评价方法[S].北京:中国标准出版社,1999.
QC/T 480—1999 Criterion thresholds and evaluation of controllability and stability for autobiles[S].Beijing:China Standards Press,1999.(in Chinese)
Research on Test Methods for Special Vehicle Handling and Stability Based on Dynamics Simulation
LI Jun1,2,YUAN Shi-hua1,JU Dong-mei1,2,LI Rui-ying2
(1.School of Mechanical Engineering,Beijing Institute of Technology,Beijing 100081,China; 2.China Research and Development Academy of Machinery Equipment,Beijing 100089,China)
In order to study and lay down the test methods of special vehicle handling performance and stability,the test method of special vehicle handling and stability is set up by considering the characteristics of special vehicle on the basis of the test methods in GB and ISO.The key parameters of vehicle handling and stability test are determined and analyzed through special vehicle dynamics modeling,handling and stability simulation,data processing and score evaluation.Based on this method,the test of sample vehicle is completed.The test results show that the test method is feasible,and meets the test and scoring evaluation requirements of special vehicle handling and stability.
ordnance science and technology;special vehicle;handling and stability;dynamics simulation;test method
U462.3;U467.1
:A
1000-1093(2014)02-0262-06
10.3969/j.issn.1000-1093.2014.02.019
2013-09-25
李军(1969—),男,研究员。E-mail:lijun_cn@sina.com