潜艇悬停水舱排注水控制方式比较
2014-06-27,
,
(海军工程大学 舰船工程系,湖北 武汉 430033)
悬停是潜艇水下停泊的重要方式之一,通常是指潜艇水下航行状态停车后,经准确均衡,利用专用水舱的注、排水(不操舵),实现潜艇无航速下深度控制的操艇方式[1]。潜艇悬停水舱的排注水控制有多种方式,不同的控制方式各有优劣。本文将对潜艇悬停水舱不同的排注水控制方式进行比较研究,采用综合评价的方式,分析不同控制方式的特点,在定性分析与定量计算的基础上提出最为合理的悬停水舱排注水控制方式。
1 悬停水舱的注排水控制方式
潜艇水下悬停,是通过悬停水舱的注排水,改变潜艇的水下受力情况,保持受力平衡,从而实现潜艇水下零航速或者极低航速下的深度控制。根据不同的排注水动力,可分为三种控制方式:气排注、泵排自注和泵排注[2]。
1.1 气排注
气排注控制方式以美国“海狼”级潜艇的悬停控制系统为参考。气排注控制方式采用两个悬停水舱(1号和2号),利用中压空气控制系统使水舱与舷外形成一定的压差Δp,从而实现水舱的注排水。基本工作原理如下:初始状态时,1号水舱压力低于舷外海水压力Δp,用于注水;2号水舱压力高于舷外海水压力Δp,用于排水。当1号水舱注满或者2号水舱排空时,利用气压控制系统改变两水舱与舷外海水的压力差,实现其功能互换。
1.2 泵排自注
泵排自注控制方式设置两个悬停水舱(1号和2号)[3],容积为9 m3×2,两水舱通过管路连接,利用悬停水舱供、排气系统,使悬停水舱压力低于舷外海水压力Δp。当悬停水舱需要注水时,海水由于压差Δp从舷外自动注入悬停水舱;悬停水舱排水时,1号悬停水舱的海水经管路系统通过悬停水泵排出舷外。管路系统在悬停水泵的出口设有回流管路,通过海水流量自动调节阀、电液球阀可将海水回流到2号悬停水舱。悬停水泵一直运转,通过海水流量自动调节阀调节回水流量来控制系统排水流量,当不需排水时,悬停水泵抽出的海水全部经回流管路返回2号悬停水舱。
1.3 泵排注
泵排注控制方式设置一个悬停水舱,利用悬停水泵管路和气压调节回路实现悬停水舱的排注水控制。系统利用压缩空气使水舱压力和舷外海水压力保持基本一致,悬停控制台根据指令深度与实际深度的偏差以一定的控制规律计算出注排水量或注排水速度(流量),启动、停止悬停水泵并控制相关阀件的启闭,控制悬停水舱排注水。
2 不同控制方式分析比较
2.1 噪声源分析
隐蔽性对于潜艇至关重要,因此噪声水平是衡量潜艇装置系统的一项重要性能指标。潜艇悬停控制系统工作时,噪声主要来自于气压调节系统和排注水管路。
根据三种悬停水舱注排水控制方式的基本原理可知,三种控制方式所采取的气压调节系统结构与工作原理基本相同,输出压力分别为气排注控制方式p±Δp,泵排自注控制方式p-Δp,泵排注控制方式p,在采取相同的降噪措施下,三种控制方式下气压调节系统的噪声水平相当。
相对于其它噪声源,海水管路的振动噪声一直没有得到有效的控制,成为困扰潜艇降噪的一道难题。管路的振动噪声大体可以分为两类:机械噪声和水动力噪声[4-5]。
气排注控制方式下悬停水舱和舷外通过管路和阀件连接,整个管路无水泵;泵排自注控制方式下悬停水舱和舷外通过管路、水泵(持续工作)和阀件连接;泵排注控制方式下悬停水舱和舷外通过管路、水泵(间歇工作)和阀件连接。因此,气排注时海水管路的噪声主要包括阀件工作引起的振动噪声,阀件引起的管路压力脉动引起的噪声;泵排自注时的噪声主要包括泵和阀件工作引起的振动噪声,泵和阀件引起管路流量脉动,进而引起压力脉动,产生振动噪声,其中泵是产生压力脉动的主要因素;泵排注时的噪声主要包括泵启动、停止以及运转引起的振动噪声,阀件工作引起的振动噪声,泵和阀件引起管路流量脉动,进而引起压力脉动,产生振动噪声。
2.2 高压气体消耗量
潜艇携带高压气体是有限的,因此悬停水舱排水时的高压气体消耗量也是选择注排水控制方式的影响因素。参照文献[6]中高压气体计算方法,根据理想气体状态方程,设气压调节系统中气体近似为等温变化,则等温状态过程方程式为
pV=C
(1)
则:
p1V1=p2V2
(2)
(3)
式中:V1——排水体积;
V2——高压气体消耗量;
p1——悬停水舱压力;
p2——高压气体压力。
以高压气体压力p2为24.5 MPa,悬停深度h为50~300 m,悬停过程总排水量V1为9 m3,压差Δp为0.2 MPa进行计算,结果见表1、2。
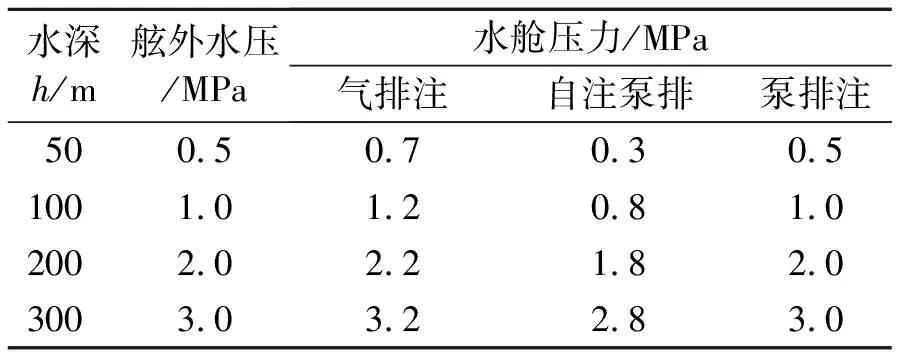
表1 不同悬停深度下水舱压力
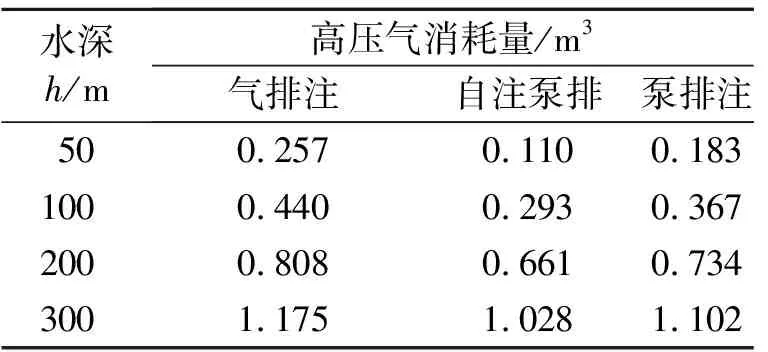
表2 不同悬停深度下高压气体消耗量
通过表1可知,在相同条件下三种控制方式的高压气体消耗量都随悬停深度的增大呈线性增大,并且三种控制方式下消耗量的差值基本保持不变。
2.3 舱室气压增量
当悬停水舱注水时,无论采用何种注排水控制方式,为了维持水舱压力的稳定,系统都会向潜艇舱室内排入空气,从而引起舱室内部气压升高。由于采用不同的控制方式的悬停系统向舱室中排入的空气压力不同,从而引起的舱室气压增量也不同。同样将排气过程近似为等温变化,等温状态过程方程式为
p3V3+p4V4=p5V4
(4)
(5)
舱室气压增量为
(6)
式中:V3——排入舱室空气体积;
V4——潜艇舱室空间总体积;
p3——注水时悬停水舱压力;
p4——初始舱室压力;
p5——排气后舱室压力。
根据气注排控制方式的原理可知,悬停水舱由排水转换为注水时,水舱气压由p+Δp变为p-Δp,注水过程中将压力为p-Δp的空气排入舱室之中,整个过程等效为将压力为p+Δp的空气排入舱室之中。
以悬停深度h为50~300 m,悬停过程向舱室排气总量V3为9 m3,舱室空间总体积V4为1 000 m3,压差Δp为0.2 MPa进行计算,结果见表3。
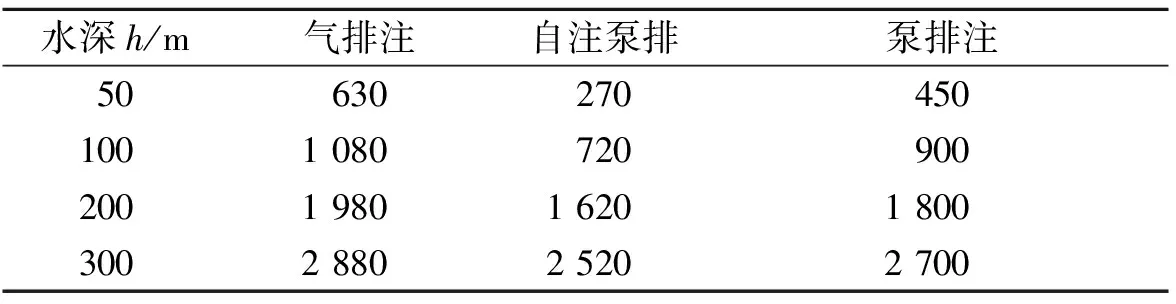
表3 不同悬停深度舱室气压增量 Pa
由表3可知,随着悬停水深的增加,舱室气压增量增大,不同的控制方式下增量差值减小;水深在100 m以上时,不同的控制方式下舱室气压增量相差较大,其中气排注最大,泵排自注最小;水深超过100 m之后,不同的控制方式下舱室气压增量相当;水深300 m时,三种控制方式下的舱室气压增量均不超过0.03个大气压,在人体承受范围之内。
2.4 能耗
潜艇水下航行时的能量由蓄电池提供,蓄电池一次充电的电量是有限的,因此能耗水平也是比较不同注排水控制方式的重要方面。潜艇悬停系统注排水的动力是系统的主要能耗来源。见表4。

表4 不同控制方式注排水动力源
在不计阀件启闭消耗能量的情况下,气排注的注排水不需要消耗艇上电源,泵排注仅在注排水时泵要消耗艇上电源,泵排自注虽然在注水时动力来自压差,但是在整个悬停过程中泵一直处于运转状态,因此能耗最高。
3 结论
由于不用设置悬停水泵,气排注相较于其它两种控制方式在噪声水平方面具有明显优势;理论上,三种控制方式在高压空气消耗量、舱室气压增量两个方面性能相当。但是在进行深度稳定控制时,多数情况下注排水量较小,且注水、排水交替进行,若系统允许有一定的气压偏差,则悬停控制时,多数情况下泵排自注和泵排注两种控制方式下既不需要消耗空气也不会向舱室排放空气,因此泵排自注和泵排注两种控制方式在高压空气消耗量、舱室气压增量两个方面具有一定优势;在不计阀件启闭消耗能量的情况下,三种控制方式的能耗水平由低到高依次为:气排注、泵排注、泵排自注。
因此,在潜艇日益重视减振降噪的情况下,付出一定量的多余高压气体消耗量与舱室气压增量是可以接受的,通过以上比较研究,认为潜艇的悬停水舱选择能耗及噪声最低的气排注控制方式最为合理。
[1] 俞科云,戴余良,施生达.潜艇水下悬停运动控制仿真研究[J].中国舰船研究,2010,5(2):18-21.
[2] 潘国良.潜艇水下悬停运动的操纵控制研究[D].南京:东南大学,2005.
[3] 赵秀娟.潜艇悬停控制试验系统研究[D].武汉:华中科技大学,2009.
[4] 程广福,张文平,柳贡民,等.船舶水管路噪声及其控制研究[J].噪声与振动控制,2003(6):31-34.
[5] 郭 涛.管路的流致振动及噪声研究[D].武汉:华中科技大学,2012.
[6] 张宏伟,丁淑华,王晓鸣,等.小型水下自航行器自沉浮装置设计与研究[J].海洋技术,2008,27(1):1-3.
