绕线式异步电机转子变频矢量控制系统研究
2014-06-26程国栋夏帅
程国栋,夏帅
(中国矿业大学徐海学院,江苏 徐州 221008)
1 引言
目前,绕线式异步电机调速大多采用定子变频技术。定子变频技术在中低压电机应用场合中展现了良好的调速性能。在高压电机(6 kV或10 kV)应用场合中,因定子侧电压等级高,通常采用H桥级联式定子变频技术,该技术采用的功率器件多、线路复杂、成本高且可靠性低。
通常,高压绕线式异步电机转子侧电压等级比定子侧电压等级低。利用该特点,文献[1]提出了一种转子变频调速系统,以解决上述高压绕线式异步电机定子变频技术存在的缺点。如图1所示,将绕线式异步电机定子三相绕组短接,转子三相绕组接相应电压等级的变频器。该系统的工作原理为:变频器将三相电送至转子绕组,由转子绕组进行励磁,产生的旋转磁场切割定子绕组,在定子绕组中产生感应电动势及感应电流。旋转磁场和感应电流相互作用,产生电磁转矩,从而带动转子旋转。文献[1]中采用VF控制思想,电机调速动静态性能差,不适用于高性能调速场合。在其基础上,本文提出一种转子变频矢量控制技术,提高了调速系统的动静态性能,可用于高性能调速场合。

图1 绕线式异步电机转子变频主回路Fig.1 Main circuit of wound⁃rotor IM with rotor⁃side converter
针对绕线式异步电机转子变频矢量控制系统,本文推导出基于定子磁场定向的电机数学模型,建立了转子变频矢量控制系统仿真模型,在理论及仿真结果的基础上进行了实验研究。仿真及实验结果验证了绕线式异步电机转子变频矢量控制系统的可行性,并为之提供了理论依据。
2 系统设计
2.1 基于定子磁场定向的矢量控制
绕线式异步电机在两相任意旋转坐标系下的电压方程及磁链方程如下:
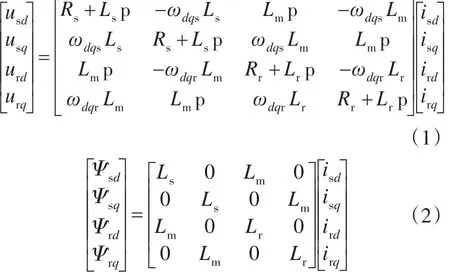
式中:d为旋转坐标系下直轴分量;q为旋转坐标系下交轴分量;ωdqs为旋转坐标系相对定子绕组的角速度;ωdqr为旋转坐标系相对转子绕组的角速度;p为微分算子。
为了方便分析,设转子绕组为参照物,即假设转子绕组静止,定子绕组以ωs旋转。因转子变频时,电机由转子绕组励磁,旋转磁场角速度等于转子频率的同步角速度ω1。所以在两相同步旋转坐标系下,坐标系相对转子绕组的角速度ωdqr等于转子频率的同步角速度ω1,坐标系相对于定子绕组的角速度ωdqs=ωdqr=-ωs=ω1=ωs=ωs1,即为滑差角速度。
将ωdqr=ω1,ωdqs=ωs1带入式中,可得两相同步旋转坐标系下的电压方程为
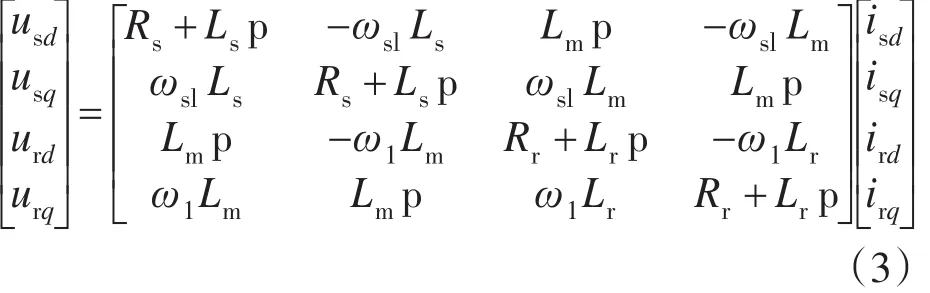
按定子磁场定向,则由式(2)可得:

考虑定子三相绕组短接,可知:

将式(4)和式(5)带入式(3)和式(2)中,即可得:
式中:ω1为转子频率的同步角速度;ωsl为转差角速度。
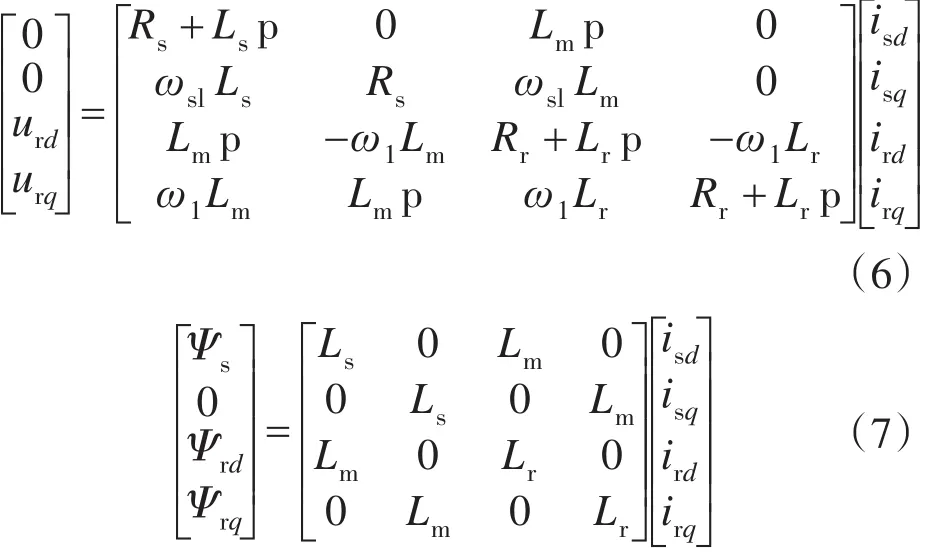
结合式(6)、式(7),可得:
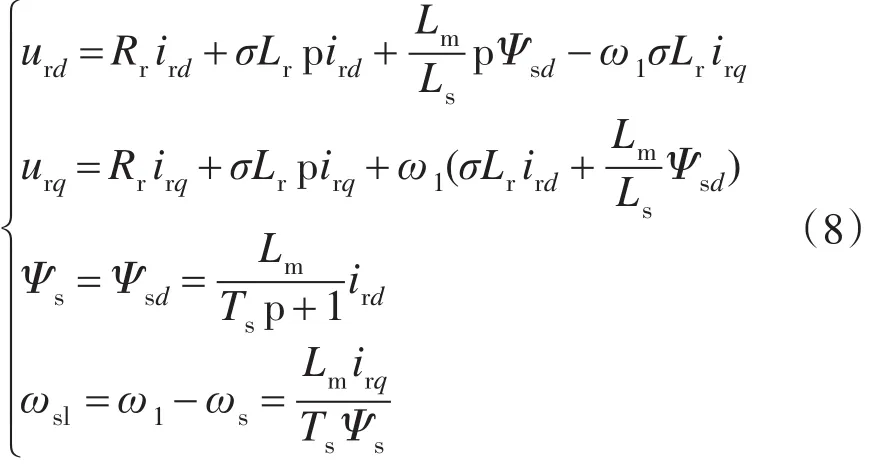
式(8)即构成转子变频矢量控制系统的方程式。
由式(8)构成的绕线式异步电机转子变频矢量控制系统原理框图如图2所示。
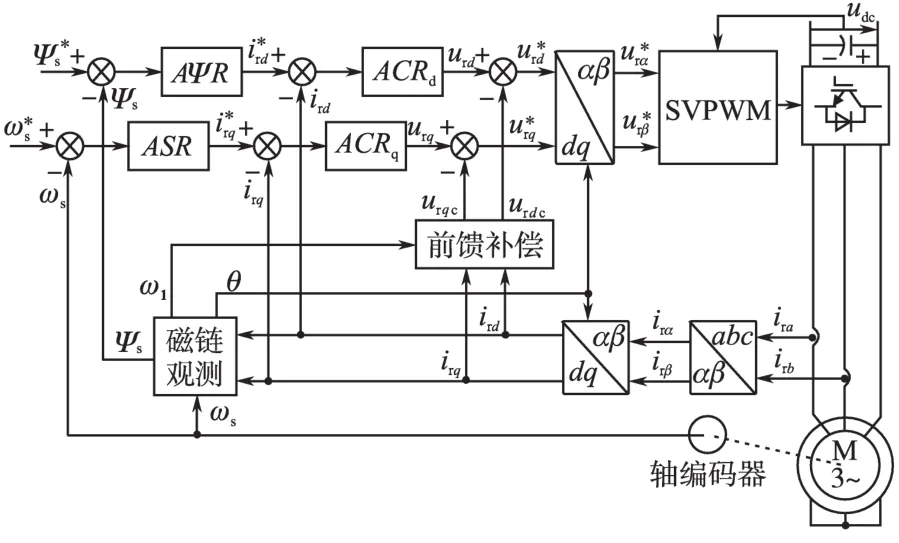
图2 转子变频矢量控制系统原理框图Fig.2 Vector control system block diagram of IM with rotor⁃side converter
从图2可以看出,与传统定子变频矢量控制系统类似,转子变频矢量控制系统采用双闭环控制方式,内环为转子电流环,外环为转速环和定子磁链环。通过电流互感器检测电机转子两相电流,经过坐标变换,反馈至电流内环,形成电流闭环控制;通过轴编码器检测电机转速,反馈至转速外环,形成转速闭环控制;根据磁链观测器观测定子磁链,反馈至定子磁链外环,形成定子磁链闭环控制。
2.2 定子磁链观测器
本文采用定子磁场定向的矢量控制,因此定子磁链观测非常重要。常用磁链观测模型有:电流模型、电压模型。
2.2.1 定子磁链电流模型
定子磁链电流模型为
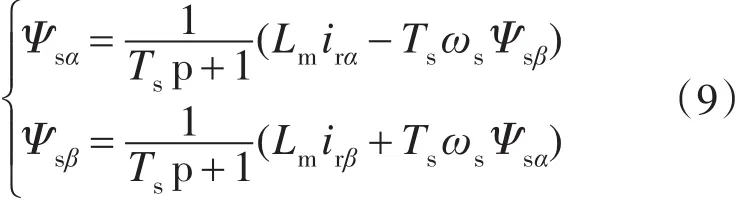
由式(9)构成的电流模型如图3所示。可以看出,该模型需要实测的转子电流和定子速度(转子速度的负值)信号。受电动机参数变化的影响,电流模型一般在低速时使用。

图3 定子磁链电流模型Fig.3 Current model of stator flux
2.2.2 定子磁链电压模型
定子磁链电压模型为
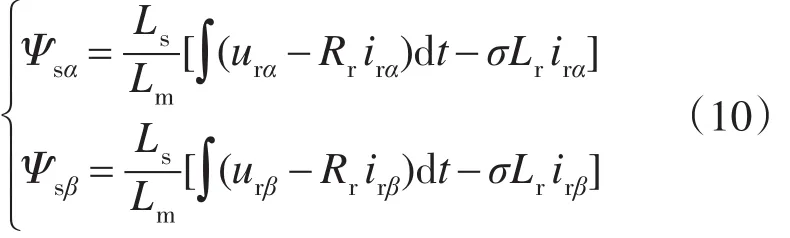
由式(10)构成的电压模型如图4所示。可以看出,它只需要实测的转子电压和转子电流信号,不需要转速信号。但电压模型包含纯积分项,积分初始值和累计误差都会影响计算结果,在低速时,转子电阻压降变化的影响也较大。因此,电压模型更适用于中高速范围。

图4 定子磁链电压模型Fig.4 Voltage model of stator flux
3 仿真研究
为验证上述绕线式异步电机转子变频矢量控制系统的可行性,根据图2所示的转子变频矢量控制原理图,采用Matlab/Simulink进行了仿真。仿真用参数见表1。

表1 仿真用参数列表Tab.1 The list of simulation parameters
以矿井提升机单次提升工况为模型进行仿真,仿真条件为:电机全载启动,转速给定起始值为750 r/min,0.9 s时刻阶跃变为1420 r/min,1.8 s时刻阶跃变为0,待电机完全停止后,转速给定为-1420 r/min,即电机反向运行至全速。
图5为全程速度曲线,给定转速后,电机平稳加、减速,并很快稳定在给定转速。图6为全程转矩曲线,电机保持最大转矩启动,启动结束后,转矩保持在给定转矩。图7为定子磁链曲线,定子磁链响应速度较快,且在电机启动过程中保持恒定。
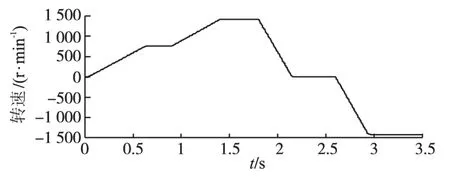
图5 全程速度曲线Fig.5 Speed waveform in the whole process

图6 全程转矩曲线Fig.6 Torque waveform in the whole process
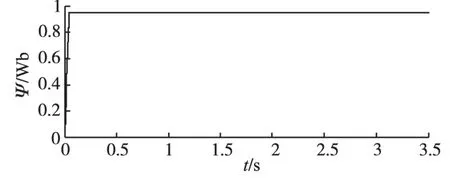
图7 定子磁链曲线Fig.7 Stator flux waveform
4 实验研究
为进一步验证转子变频矢量控制系统的可行性,本文采用DSP F2812进行了硬件平台实验,实验用电机参数如表1所示。
图8为转速响应波形,电机在阶跃给定转速条件下平滑启动,并伴有微小超调,最终可以稳定在给定转速下,符合电机调速的基本特征。图9为定子磁链波形,定子磁链响应速度较快,且在电机启动过程中基本保持恒定,磁链观测器的观测精度满足了电机调速要求。图10为转子电流励磁分量和转矩分量波形,系统实现了转子电流励磁分量和转矩分量的解耦,且励磁分量和转矩分量均较好地跟踪了系统给定值,稳态误差小,验证了电流环PI调节器参数设计的有效性。图11为转子电流ia,ib波形。图12为输出电压重构ua,ub波形。输出至电机转子绕组的电压、电流均呈现正弦化,且相间互差120°。
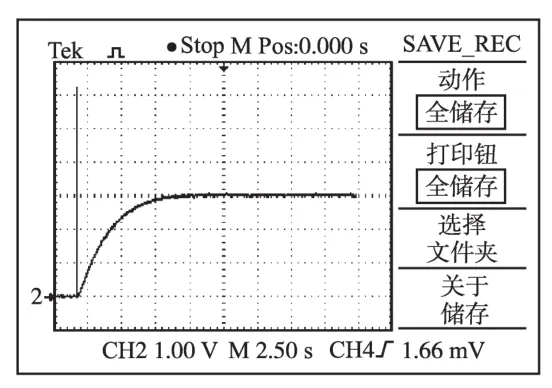
图8 转速响应波形Fig.8 Speed response waveform

图9 定子磁链波形Fig.9 Stator flux waveforms
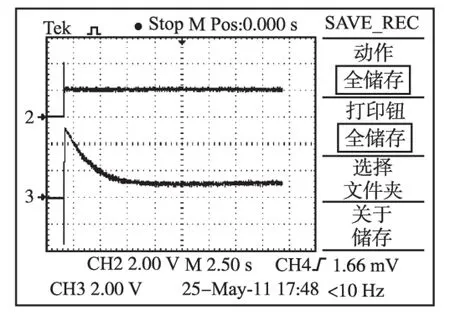
图10 转子电流励磁分量和转矩分量波形Fig.10 Excitation and torque component of rotor current waveforms
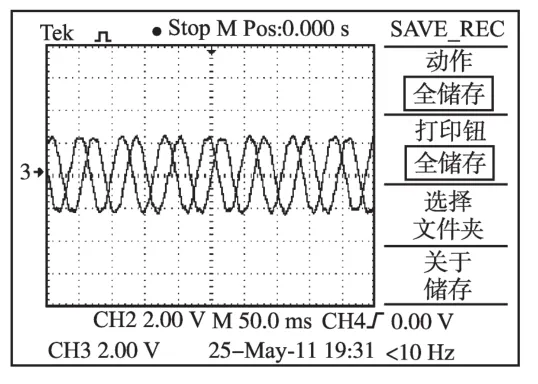
图11 转子电流ia,ib波形Fig.11 Rotor current ia,ibwaveforms

图12 输出电压重构ua,ub波形Fig.12 Reconstructed output voltage ua,ubwaveforms
5 结论
本文提出一种绕线式异步电机转子变频矢量控制系统,推导出基于定子磁场定向的电机数学模型,建立了转子变频矢量控制系统框图,通过Matlab仿真及硬件平台实验,验证了所提出的转子变频矢量控制系统的可行性,有效地解决了传统高压绕线式异步电机定子变频存在的问题,促进低压通用变频器在高压变频调速系统中的应用。
[1]纪胜春.高压交流绕线电机转子变频调速控制系统[P].中国.实用新型专利.CN 200956563Y.2007.
[2]李永东.交流电机数字控制系统[M].北京:机械工业出版社,2002.
[3]陈伯时.电力拖动自动控制系统——运动控制系统[M].第3版.北京:机械工业出版社,2006.
[4]马小亮,王春杰.一种新的中压电机调速法——转子变频调速[J].电力电子技术,2004,38(3):3-5.
