基于遗传算法寻优的双电机控制系统研究
2014-06-26王桂荣马梦娜刘大亮
王桂荣,马梦娜,刘大亮
(1.中国计量学院机电工程学院,浙江杭州310018;2.河南送变电工程公司,河南郑州450051)
1 引言
对于双直线电机同步驱动的龙门运动平台,两电机之间运行的同步性是实现精确控制的必要条件。由于多电机系统存在耦合性、非线性与负载扰动等因素的影响,易使双轴间产生同步误差,造成运动精度降低甚至损坏机械结构。为提高控制精度,减小双轴间运动误差,PID控制被广泛应用,但由于PID 控制器参数难以自调整的局限性,在非线性、复杂时变系统中,很难获得较好的控制效果。在目前的PID 参数的优化方法中,单纯法、Z-N 整定[1-2]法等基于特定的经验公式,整定精度低,在复杂系统对象中难以达到良好的控制效果;随着计算机技术与智能优化算法的发展,遗传算法优化因其不需初始信息、寻优快速高效等优点,克服了常用整定方法的不足,经常应用在抑制非线性时变干扰方面并有显著成效[3-4]。
针对常规的遗传算法存在的易陷入“早熟”、搜索速度过慢、算法品质依赖算子的选择等缺陷[5],本文对标准遗传算法进行改进,设计了一种自适应的遗传算法对PID速度控制器参数进行优化。通过在优化过程中不断改变交叉、变异率,提高了遗传算法的优化精度与收敛速度;同时基于偏差耦合策略设计了双直线电机同步控制系统模型,提高了系统的同步控制精度与响应速度。仿真结果验证了所设计系统方案的有效性与实用性,将该方案用于双电机运动平台中,系统具有良好的动态性能与同步精度,鲁棒性强,并且易于实现。
2 控制系统设计
本文的直线运动平台具有高加速、精度高的性能要求,控制系统需具备较高的动态响应与轨迹跟踪能力。目前的多电机同步控制策略中,常用的方法包括非耦合控制与耦合控制[6]。非耦合控制结构简单,但受外界干扰后同步特性较差;交叉耦合控制能够跟踪每台电机的负载变化,但只适用于2台电机的情况。本文采用偏差耦合策略,将2台电机速度输出进行比较,得到的速度偏差作为该电机的速度补偿信号,以模糊PID 控制器作为速度补偿器;系统仅对主动电机1 使用位置控制,主动电机的位置控制器输出作为两直线电机的速度指令信号,实现定位自由度唯一[7];并增加前馈控制以提高系统的响应速度。该控制策略跟随性好、同步精度高、不易造成电机之间失步。系统整体控制结构如图1所示。
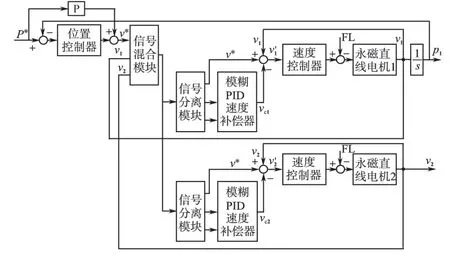
图1 控制系统结构图Fig.1 Structure diagram of control system
图1中,p*为位置给定,p1为电机1位置输出;v*为参考速度信号,v1,v2分别为两运动轴的实际输出速度。位置控制采用P 控制器,速度控制采用PI控制器。
该方案主要思想是:将每台电机的速度反馈与速度给定作差,取得的偏差信号作为速度控制器的输入:

将2台电机速度反馈作差,得到同步偏差e:

e作为模糊PID 速度补偿器的输入,补偿器的输出信号vcn作为该轴的速度补偿信号,将其差值送入电机速度控制器。即最终速度给定v′n为

式中:n为电机序号。
该控制策略提高了多电机之间的协调控制性,改善了电机之间受负载扰动的动态响应性能,并能适用于多于2 台电机的控制系统,有利于后续研究。
3 PID控制器设计
3.1 遗传算法优化PID原理
遗传算法模拟自然界的生物遗传进化机制对个体进行筛选,算法简单,可并行处理,并能够得到全局最优解,被大量用于科学和工程等领域。
PID控制器将偏差的比例(P)、积分(I)、微分(D)通过线性组合构成控制量,对被控对象进行控制。将PID 中的Kp,Ki与Kd串接在一起作为遗传算法群体中的个体,并计算出每一组个体的适应度函数值;然后,对整个群体进行选择、交叉和变异等遗传操作,不断地优化,直至满足精度要求。遗传算法优化PID控制器参数原理图如图2所示。

图2 遗传算法PID优化方案原理图Fig.2 Schematic diagram of genetic algorithm PID optimization
PID 控制器将系统输出y(t)与系统给定r(t)比较得出闭环误差e(t)=r(t)-y(t),给出控制信号u(t),即
阅读一个民族的历史小说是了解这个民族历史和精神气质的有效途径。这也符合苏格兰文学的传统,即通过小说来讲述历史。然而,苏格兰历史小说浪漫化的特点并不能真正展示苏格兰历史的全貌。正如苏格兰历史研究专家科林·基德(Colin Kidd)指出的,尽管苏格兰的过去生动而独特,却因其浓重的地方色彩和演义性质,无法为现代苏格兰社会提供一个可供参考、逻辑完整的意识形态。(转引自Craig 1999:118)苏格兰人留给苏格兰的历史如同《兰纳克》中的“时光隧道”,没有时间的流动,完全处于真实的历史因果之外。这种状况在苏格兰进入工业化社会之后也未得到改善,它成功抹去了浪漫化的过去,却仍未架起通往现在的桥梁。

式中:Kp,Ki,Kd分别为比例、积分、微分常数;t为时间变量。
在PID 控制器的设计中,Kp,Ki,Kd3个参数直接影响到控制器的动、静态性能。因此,确定最优的Kp,Ki与Kd组合,才能使双电机控制系统性能指标达到最优化,也是遗传算法寻优的目标所在。
3.2 自适应遗传算法设计
3.2.1 适配函数选择
适应度函数是遗传算法对个体“优劣”的评价标准,适应度函数的选取直接影响遗传算法收敛速度与最优解的寻找。从控制系统稳定性、准确性、快速性3个方面来考虑,本文选取系统误差e,控制器输出u,与调节时间t作为约束条件;同时为避免超调,采取惩罚功能,一旦产生超调,将超调量作为最优指标的一项[8]。将这4个目标量按照一定的权重求和,则参数选择的最优指标J 为

式中:e(t)为系统误差;u(t)为控制器输出;tu为上升时间;w1,w2,w3为权值,且w4≫w1;ey(t)=y(t)-y(t-1),y(t)为被控对象输出。
由式(5)可知优化是求目标函数J 的极小值问题,因而相应适应度函数f 可以通过对性能指标函数J 做适当的变换得到,将极小值问题转换为极大值问题,f 的选取要避免进化初期出现的早熟现象与进化后期的退化现象[9]。这里取适应度函数f为

3.2.2 遗传算子的设计

式中:C1≤0.9,C2≤0.033;fimax为进行交叉操作个体中较大的适应度;fi为进行变异操作个体适应度;fmax为此个体最大适应度;favg为此个体平均适应度。
这种pm,pc随适应度f 变化的调节方法[10]有更高的优化精度与效率,在进化初期有较强的全局搜索能力,后期则局部搜索能力增强,防止早熟现象产生。
本文利用比例选择算子进行选择操作,适应度高的个体被遗传到下一代群体中的概率较高,个体被选中的概率pi为

式中:M为种群大小。
用这种方法进行选择操作时,可以避免使用度轮盘等方法存在随机性的问题,提高全局收敛性与计算效率。在选择过程中结合最佳个体保留法,适应度最高的个体不参与交叉与变异,用其代替交叉变异后适应度最低的个体,确保较优个体进入下一代种群。
4 仿真实验
本文以直线电机多轴运动平台BJSM-III 中的龙门进给伺服系统为研究对象,在Matlab2012a 环境下,采用Simulink 搭建系统仿真模型并进行仿真实验,验证控制方案的有效性。
使用Matlab 中的FIS 编辑器建立模糊控制算法,模糊控制PID速度补偿器仿真模型见图3。
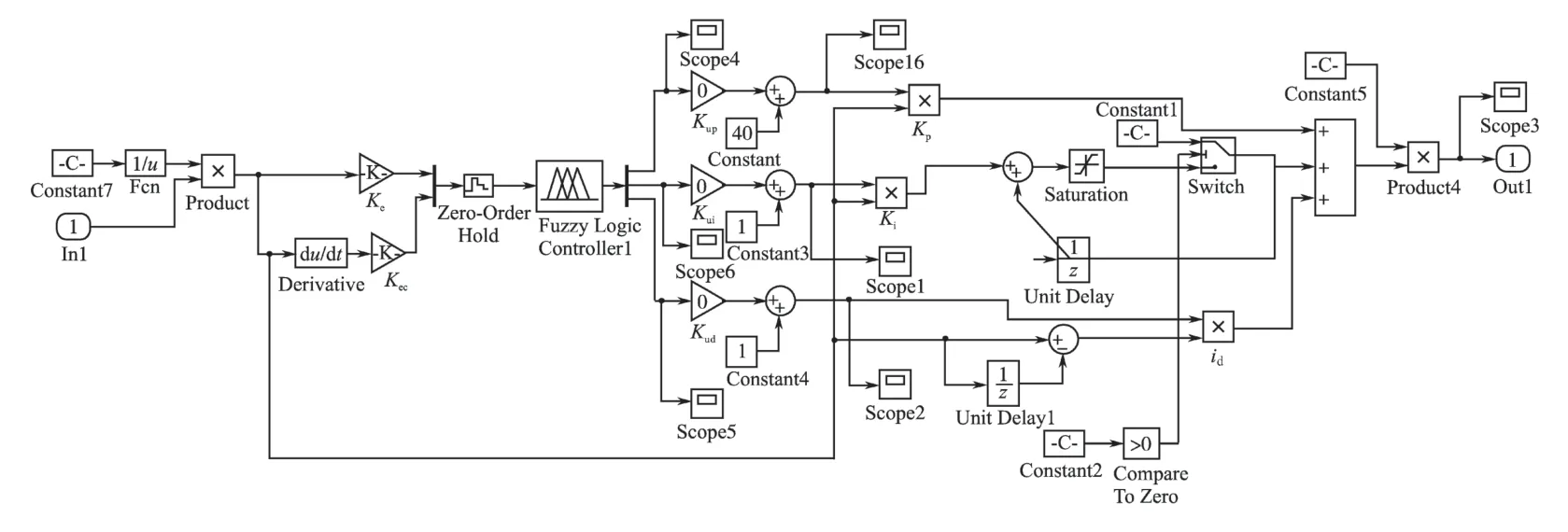
图3 模糊PID调节系统模型Fig.3 Model of fuzzy PID control system
Simulink 中的Mechaware 工具箱提供了所需的永磁同步直线电机与驱动器仿真模型,直线电机参数为:极距32 mm,动子质量3.6 kg,电磁推力系数59.755 N/A,动子电阻2.6 Ω,q 轴电感26.7 mH,额定推力263 N,峰值电流11.3 A,额定电流4.4 A,最大速度6 600 mm/s;采样时间0.000 5 s。
在Matlab 环境中,编写仿真程序,选择合适运行参数,应用所设计自适应遗传算法对系统速度PID 控制器参数进行优化。经过100 代进化,得到Kp,Ki,Kd3个参数的优化结果如表1 所示,代价函数J的优化过程如图4所示。
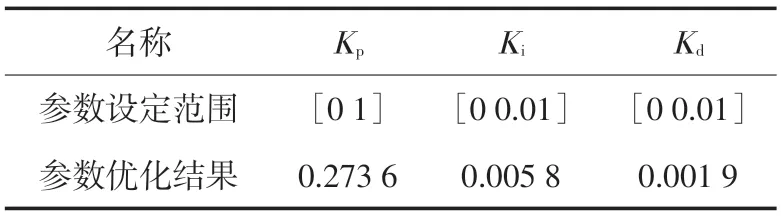
表1 PID参数优化结果Tab.1 The PID parameter optimization results
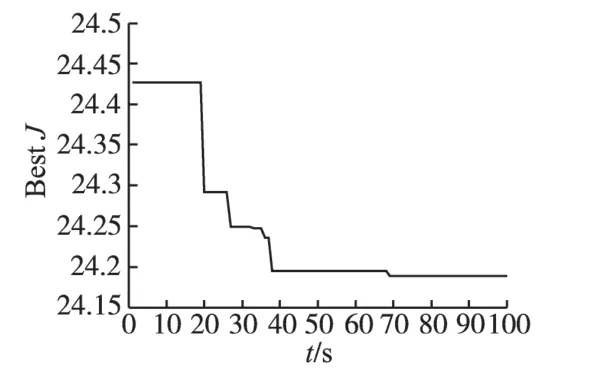
图4 代价函数J的优化过程Fig.4 Optimization of cost function J
给定位置信号为斜率10 mm/s 的斜坡信号,分别对系统采用自适应遗传算法与Z-N 法对PID参数进行优化,观察分析其响应曲线。
图5 为空载时单个电机位置与速度跟随曲线。可以看出,对于单电机来说自适应遗传算法优化的控制系统相对于利用Z-N 算法整定的系统具有更高的控制精确度、更小的超调量与延时。图6为2种控制方式分别在20 N与200 N不同负载下的速度响应曲线,可以看出负载变化对Z-N法有较明显影响,对自适应遗传算法则影响不大,系统具有较强的抗干扰性。
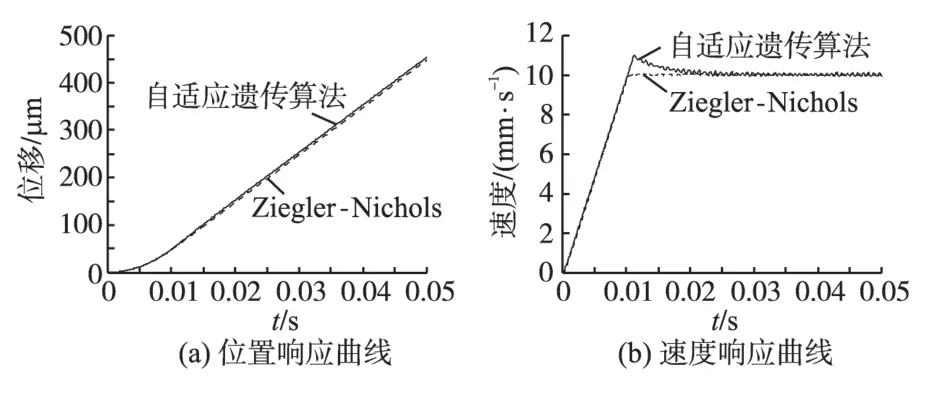
图5 空载时系统响应曲线比较Fig.5 System response curves of empty-load
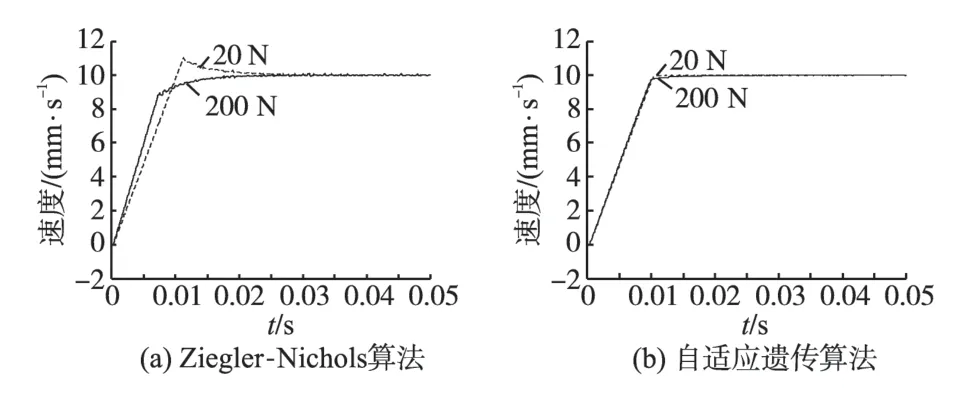
图6 不同负载下两种方案速度响应Fig.6 Velocity response curves with two methods under different loads
当电机运行稳定后,在仿真开始0.2 s时对电机1突加大小为20 N的负载扰动,以检验控制系统抗干扰性。系统对位置与速度的跟踪结果如图7所示;图8为2种方案下突加扰动后2台电机间的速度误差曲线。可以看出与Z-N优化相比,采用自适应遗传算法系统电机间误差较小,受扰动时波动较小,抗干扰能力强,调节时间短,能尽快恢复同步状态。
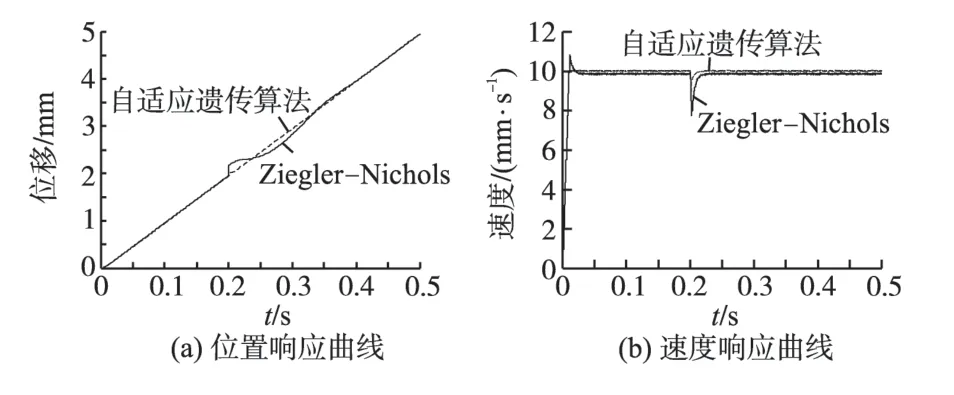
图7 电机1负载突变响应曲线Fig.7 System response curves of motor 1 under abrupt loads
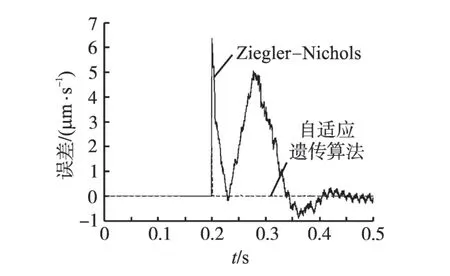
图8 两电机同步速度误差曲线Fig.8 Synchronous speed error curves of two motors with two methods
5 结论
针对双直线电机龙门运动平台系统的非线性、耦合性与干扰不确定性等特点,为提高系统控制进度与同步性能,本文设计了偏差耦合控制策略与模糊控制结合的系统模型,采用自适应遗传算法用于PID 控制器参数的优化,并通过仿真实验对优化结果进行验证。
仿真结果表明,通过自适应遗传算法整定的系统有较高的控制精度,可以有效抑制外部扰动对系统的影响并能较快恢复同步,且有较好的鲁棒性和快速性,效果均优于通过Z-N算法整定的结果。该方案适用于直线运动平台双轴系统,具有较高的工程实用价值;加之选取合适的运行参数,后续可继续对使用遗传算法优化二维运动控制做进一步研究。
[1]Millan P.Design and Application of Suboptimal Mixed H2/H∞Controllers for Networked Control Systems[J].Control Systems Technology,2012,20(4):1057-1065.
[2]Lee Jeng-dao.Dsp-based Sliding-mode Control for Electromagnetic-levitation Precise-position System[J].Industrial Informatics,2013,9(2):817-827.
[3]张文辉.自适应神经变结构的机器人轨迹跟踪控制[J].控制与决策,2011,26(4):597-600.
[4]Roberge V.Comparison of Parallel Genetic Algorithm and Paticle Swarm Optimization for Real-time UAV Path Planning[J].Industrial Informatics,2013,9(1):132-141.
[5]Liu Yen-chen.Controlled Synchronization of Heterogeneous Robotic Manipulators in the Task Space[J].Robotics,2012,28(1):268-275.
[6]南余荣.多电机传动系统协调控制及其在直进式拉丝机中的应用[D].杭州:浙江工业大学,2007.
[7]余冬梅.加工中心双直线电机自适应模糊滑模同步控制[J].组合机床与自动化加工技术,2013,50(6):92-94.
[8]刘吉臻.基于自适应遗传算法的协调控制系统优化[J].热能与动力工程,2011,26(4):432-435.
[9]张思才.一种遗传算法适应度函数的改进方法[J].计算机应用与软件,2006,23(2):108-110.
[10]李军民.自适应遗传算法在数控伺服系统控制参数优化中的应用[J].西北大学学报,2011,41(3):430-434.