一种三电平逆变器SVPWM快速算法研究
2014-06-23夏加宽
夏加宽 范 倩
(沈阳工业大学电气工程学院,沈阳 110870)
随着电力电子技术的飞速发展,多电平逆变器拓扑在工业领域中应用广泛,其中 NPC三电平逆变器应用最多[1]。三电平逆变器的输出性能主要取决于调制算法,SVPWM 技术以其易于数字实现,电压利用率高等特点,在三电平逆变器中得到广泛应用[2-3]。三电平可以看成上下两个两电平的组合,谐波含量大约为两电平的1/3,主要高次谐波远高于开关频率。其SVPWM调制原理与两电平逆变器是一致的,但其需控制的矢量比两电平的多,因此算法也复杂。传统三电平逆变器的SVPWM算法,在进行参考矢量扇区判断及计算基本矢量作用时间方面,这些操作给控制器带来了很大负担[4-8]。
因此本文针对三相永磁同步电动机,提出了一种改进的 SVPWM 算法,并将它运用于三相永磁同步电动机的控制系统。通过Vref与α轴的夹角为θ,就可以进行扇区判断,再利用查表得到基础矢量的作用时间,简化了算法步骤。最后,在三电平SVPWM 方法的基本原理和算法的基础上,详细介绍了在Matlab/Simulink环境下对算法仿真的方法,并给出了仿真结果。
1 三电平逆变器主电路结构
中点电压箝位型三电平逆变器主电路结构如图1所示。其每一相桥臂上都有4个开关管、4个反向恢复二极管和 2个箝位二极管。如 B相,当 Sb1、Sb2导通,Sb3、Sb4关断时,输出电平Ud/2,令开关状态为2;当Sb2、Sb3导通,Sb1、Sb4关断时,输出电平为0,令开关状态为1,;当Sb3、Sb4导通,Sb1、Sb2关断时,输出电平为-Ud/2,令开关状态为0。因此总共有 3种开关状态,即 2、1、0,则三相三电平逆变器共有33=27种开关状态。
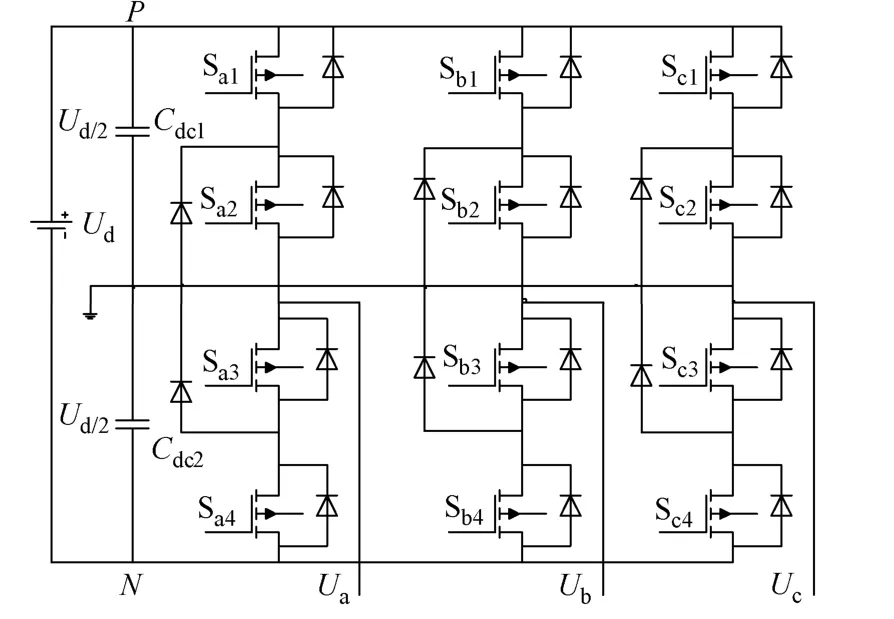
图1 三电平逆变器主电路结构
Sb1和 Sb3,Sb2和 Sb4的工作状态恰好相反,即工作在互补状态。零矢量包含3个冗余开关状态,每个小矢量包含两个冗余开关状态,因此27个开关状态实际只对应于 19个开关矢量,即 1个零矢量V0;6个小矢量V1、V2、V3、V4、V5、V6幅值、为Ud/3;6 个中矢量 V8、V10、V12、V14、V16、V18幅值为和 6 个大矢量 V7、V9、V11、V13、V15、V17幅值为2Ud/3。
三电平的空间矢量图由这19个空间矢量组成,如图2所示。空间矢量的主要思想是,判断出参考电压所在区域后,选择该区域中离参考矢量最近的三个矢量合成参考矢量,并通过计算得到每个矢量的作用时间,将矢量作用时间转换到开z关管的通断时间,得到每一个开关管的PWM脉冲。

图2 区域判断仿真波形
2 三电平逆变器SVPWM方法原理
2.1 参考矢量Vref所在扇区判断
1)判断大扇区号N
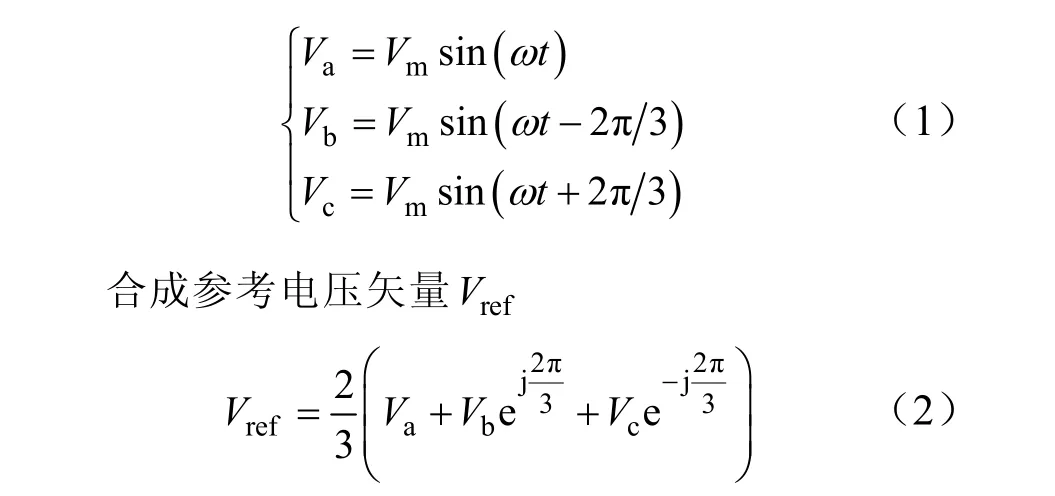
永磁同步电动机的A、B、C三相定子轴线在空间沿逆时针方向排列,三个幅值相同并且相位互差120°正弦量按照公式,此时电动机定子上的三相瞬时电压为
2)判断小扇区号n

图3 三电平逆变器空间矢量分布图

表1 小扇区判断表

(续)
2.2 判断基础矢量作用时间
三电平 SVPWM 逆变器开关顺序设计要求如下:
1)从一种开关状态切换到另一种开关状态的过程中,仅影响同一桥臂上的两个开关器件:一个导通,另一个关断。
2)从一个扇区(或区域)转移到另一个扇区(或区域)时,无需开关器件动作或只需最少的开关动作。
3)开关状态对中点电压偏移的影响最小。
以第一扇区为例,当Vref位于Ⅰ扇区(1)时,即N=1,n=1,如图4所示。

图4 Vref位于Ⅰ(1)
设T1、T2、T3是V0、V1、V2的作用时间,定义三电平逆变器的调制比,为了方便计算引入Ta、Tb、Tc,令

小扇区为基本单元,改变小扇区内三个基本矢量作用时间的顺序,用一个大区的作用时间可以得到另外五个大区的所有作用时间。利用表2可以计算各个区域矢量作用时间T1、T2、T3。

表2 N=1~6扇区基础矢量作用时间
2.3 时间状态分配
得到每个区域的矢量作用时间后,在每个区域中进行矢量时间分配,应满足以下几个基本规则。
1)为了优化开关频率,每次开关矢量变化时,只有一个开关函数改变,且不能跃变。
2)为消除偶次谐波,实现控制方便,在一个开关周期中,以某个矢量为中心轴对称分布选择开关矢量。
3)等分分配等效矢量作用时间。
第一步,实现七段式时间分配,以Ⅰ扇区4小区域为例,如图 5所示,矢量作用顺序:211 →210 →110 →100 →110 →210 →211

图5 Vref位于Ⅰ(4)七段式开关模式图
每个区域的基本矢量作用时间 T1、T2、T3,是按照以正小矢量为每个采样周期起始矢量的次序排列的,因此所有区域的七段式时间分配是一样的,但T1、T2、T3的值不同。当N=l或3或5时,如图6(a);当N=2或4或6时,如图6(b)所示。
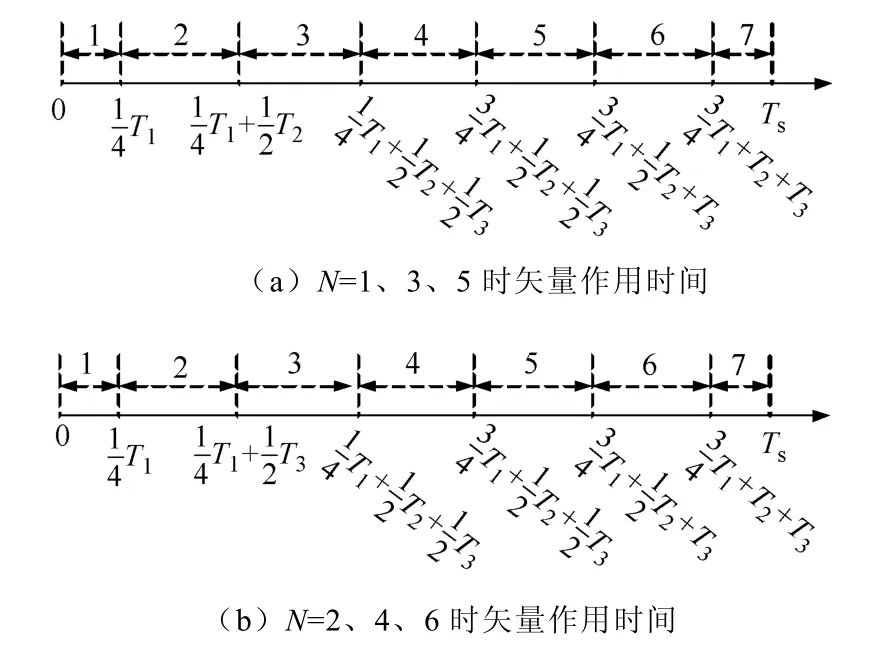
图6
为实现矢量作用时间的分配,根据矢量作用顺序改变每个大区域中T1、T2、T3的顺序,如图7所示。

图7 矢量作用时间计算
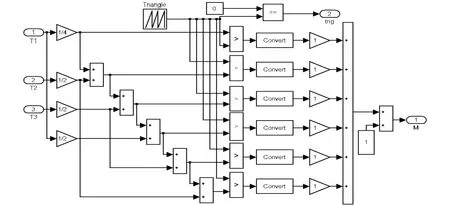
图8 矢量作用时间分配
本文采用分布法七段式,通过时间叠加产生含有与矢量状态相对应时间的梯形波M,作为矢量状态次序模块的分配信号,如图8所示。以M为载体,代表一个周期中第M个作用矢量,通过M值完成时间分配,改变工作矢量的切换。其中三角波的幅值和周期相等,均为开关周期Ts,三角载波幅值零点作为触发。
仿真结果看出,每个周期含有高度分别为l,2,3,4,5,6,7的七级阶梯,作为矢量状态多路选择开关器件的控制信号输入。每级阶梯的宽度即为相应矢量状态的作用时间。
第二步,矢量状态次序分配。依据状态作用次序原则,每个采样周期以正小矢量作为起始矢量,0、1、2表示矢量状态N,O,P。
第三步,矢量状态转成开关状态。矢量状态指低电平、零电平、高电平,开关状态表示逆变器主电路中的开关器件工作状态为关断或导通。用0、1、2分别表示低电平,零电平,高电平的三种电平状态,用0,1分别表示关断、导通开关器件的工作状态。其中每相的开关器件按从上到下的顺序编号,根据矢量状态与开关状态的对应关系以及每相开关器件的编号顺序,具体的对应关系为:0对应0011、1对应0110、2对应1100,矢量状态转化为开关状态的仿真模型如图9所示。

图9 矢量状态转化成开关状态仿真图
3 仿真结果与分析
逆变器仿真系统结构图如图10所示,输入直流电压500V,开关频率10kHz,系统分为三大部分,即:三电平SVPWM模块、三电平逆变器模块、永磁同步电动机模块。验证本文所提出的简化三电平SVPWM算法的正确性。
A相桥臂开关管的脉冲波形如图11,可见每相开关管均为第一、三管互补,第二、四管互补,第二、三管必有一个导通。永磁同步电动机线电压波形如图12所示。
图13(a)、(b)分别为三电平逆变器、两电平逆变器FFT分析结果,通过对比谐波分析频谱得出在高频处,载波频率及载波频率倍数处的谐波含量,三电平比两电平有明显的降低。根据公式6 n± 1(n=1,2,3… ) ,低频处主要为 5、7、11、13、17、19次谐波,三电平的 5、7、11、13次谐波明显降低,谐波含量近似为两电平的1/3。实验测得为永磁同步电机90Hz负载运行时的电流波形如图14所示。

图10 三电平逆变器仿真系统结构图

图11 A相桥臂PWM脉冲
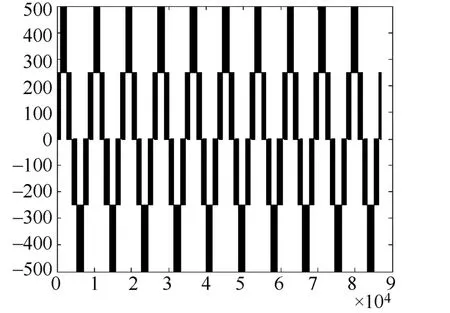
图12 永磁同步电机线电压波形图
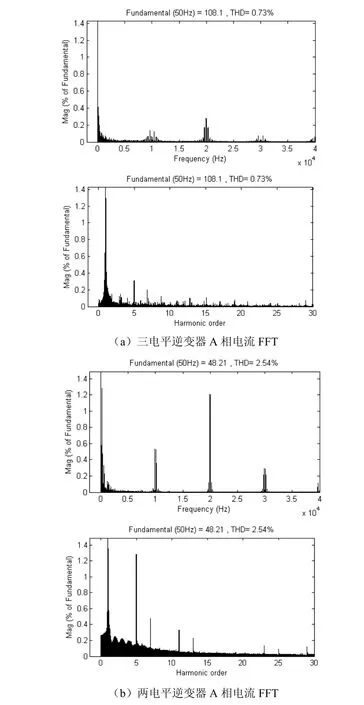
图13

图14 永磁同步电动机A相电流
4 结论
为了解决传统三电平空间电压矢量脉宽调制(SVPWM)实现起来比较复杂的问题,本文通过Vref与α轴的夹角为θ,就可以进行扇区判断,再利用查表得到基础矢量的作用信号时间,这种算法简化了空间电压矢量脉宽调制的实现过程。大大简化了区域判断过程和作用时间计算,为三电平NPC逆变器 SVPWM 实时控制提供了一种十分有效的方法。通过仿真验证了算法的正确性和有效性,具有较高的实用价值。
[1]JIANG X, XIAO X. An improved multilevel SVPWM and its generalized algorithm [J]. Proceedings of the CSEE, 2007, 27(4):90-95.
[2]HE F Y. Study and realization of simplified SVPWM algorithm based on multilevel inverter [J]. Power Electronics, 2008, 42(8): 1-5.
[3]陈娟, 何英杰. 三电平空间矢量与载波调制策略统一理论的研究[J]. 中国电机工程学报, 2013(5).
[4]张传金, 王志业. 基于DSP28335的三电平SVPWM算法研究[J]. 电力电子技术, 2011(6).
[5]SHENG W H, LI CH J, et al. Investigation on space vector PWM method for three-level convertor equipped with IGCT [J].Transactions of China Electrotechnical Society, 2007, 22(8): 1-6.
[6]范必双, 谭冠政, 樊绍胜. 三电平矢量控制变频器随机SVPWM技术[J]. 电机与控制学报, 2013(4).
[7]韩耀飞, 谭国俊. 基于简化三电平 SVPWM 算法的逆变器研究[J]. 电力电子技术, 2008 (1).
[8]旬斌, 冯晓云. 600坐标系下三电平逆变器SVPWM实现[J]. 电力电子技术, 2011(5).
