基于地理坐标系组网雷达目标速度转换方法研究
2014-06-23李浩正
李浩正 杨 璇
(西安电子工程研究所 西安 710100)
0 引言
在组网雷达系统中,为了实现通过融合中心统一处理数据,就必须将各个分站的目标坐标实时的转换到某一统一坐标系下。现在工程中应用普遍的方法是,首先把目标的坐标从站心坐标转换到地心坐标,再根据融合中心的地心坐标,把该目标转换到融合中心的站心内;对于目标速度信息的上报大部分是直接上报给融合中心[1]。这种直接上报速度的处理方法,由于受地球曲面的影响,存在误差。本文提出了一种实用的方法,有效的减小了地球曲面的影响。
1 常用坐标系
雷达系统用到很多种坐标系,坐标系的选择将会影响到计算量的大小和雷达跟踪的精度,目标的测量一般用到的是极坐标系,而数据处理却是在直角坐标系里完成。另外,当雷达安装在战车上,又有很多不同的坐标系,有相对地心的直角坐标系,有相对站心的直角坐标系等。本节主要介绍与本文相关的地球坐标系、战车坐标系。
介绍数据处理坐标系前,首先对地球的参考椭球进行介绍。具有一定的参数、定位和定向,并用来代表某一地区大地水准面的地球椭球,叫做参考椭球。一定的参考椭球确定了一定的大地坐标系。现在应用的参考椭球是世界大地测量系统1984(World Geodetic System1984)(WGS-84)椭球[2],其定义见表1。

表1 WGS-84参数
1.1 地球坐标系[3]
地球坐标系有两种表达式,地心空间直角坐标系和地心大地坐标系,其规定如下。
地心空间直角坐标系:地心直角坐标系的定义如图1,它的原点O位于地球的质量中心,Z轴平行于地球的自转轴,X轴和Y轴相互垂直固定在赤道面上,X轴由地心向外指向格林威治子午圈与赤道的交点,Z轴与地球自转轴重合,指向北极,Y轴和Z、X轴构成右手坐标系,任意一目标点P在地心空间直角坐标系中的坐标可表示为P(x,y,z)。

图1 地心空间直角坐标系与地心大地坐标系
地心大地坐标系:地球椭球中心与地球质心O重合,椭球的短轴与地球自转轴相吻合,大地纬度φ为过地面点的椭球法线与椭球赤道面的夹角;大地经度J为过地面点的椭球子午面与格林尼治平大地子午面之间的夹角;大地高H为地面点沿椭球法线到椭球面的高度;如图1所示。任意一目标点P在地心大地坐标系中的坐标可表示为P(φ,J,H)。
1.2 战车坐标系
战车坐标系包括战车大地直角坐标系、战车大地球坐标系,规定如下。
战车大地直角坐标系OEXEYEZE:战车大地直角坐标系是一种局部坐标系,其原点OE设在载体质心上;ZE轴与OE点处的地球椭球法线相重合,即OEZE轴指向天;XE轴垂直于ZE轴指向地球椭球的短轴,即 OEXE轴指向正北方向;YE轴垂直于XEOEZE平面,即OEXE轴指向正东方向;实际是一种北东天左手坐标系,如图2所示。任意一目标点T在战车大地直角坐标系中的坐标为T(xE,yE,zE)。

图2 战车大地直角坐标系
战车大地球坐标系:战车大地球坐标系也是一种局部坐标系,实际就是战车直角坐标系下的球坐标系,如图3所示,假设目标点为T,以战车大地直角坐标系OEXEYEZE的原点为原点;OET在XEOEYE平面上的投影与战车大地直角坐标系的XE轴(即北向轴)的夹角αE为方位角(顺时针方向为正);OET与XEOEYE平面的夹角βE为俯仰角(向上为正);目标点T与原点OE的径向长度为距离RE。任意一目标点T在战车大地球坐标系中的坐标为T(RE,αE,βE)。
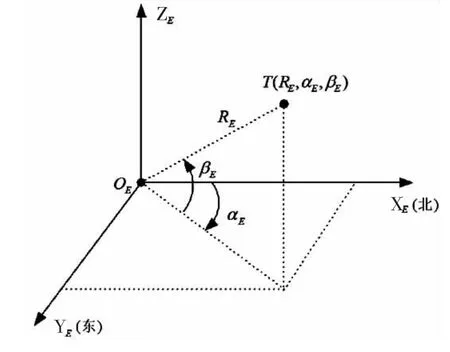
图3 战车大地球坐标系
2 坐标转换
2.1 地心大地坐标系到地心空间直角坐标系的转换
假设空间有一目标P,其地心空间直角坐标系是 P(x,y,z),地心大地坐标系是 P(φ,J,H),则其转换关系[3]:

其中N为椭球的卯西圈曲率半径,且

2.2 战车大地坐标系与地心空间直角坐标系之间的转换关系[4]
战车大地坐标系与地心空间直角坐标系之间的转换关系如下:

其中T0(x0,y0,z0)为战车在地心空间直角坐标系中的坐标。
3 速度转换方法
对于组网雷达系统,要有效利用系统内各雷达站点的数据,必须将各雷达站点的数据通过坐标转换和时间外推转到统一的时空里,这就是组网雷达系统里面的时间对准和空间对准,本节内容主要讨论空间对准相关方面的问题,即速度转换[5]。雷达系统的坐标转换技术已经基本成熟,在组网雷达系统中,大部分采用的是把协作雷达站里的目标站心坐标,通过站心坐标到地心坐标的转换,转换到地心坐标系下,再根据融合中心的地心坐标,把目标的地心坐标转换到融合中心的坐标系中。
在实际的工程应用中,会根据具体的情况,采用一些简捷的方法。比如两个雷达站间距离比较近的时候,可以忽略地球曲面的影响,两个雷达站的坐标系可近似为平行的,通过坐标平移来进行坐标转换,同时各站的各个坐标轴向上的速度也近似相等,可以把一个站的速度直接上报给另一站;但是,当两站距离较远的时候,地球曲率就不能忽略了,不能直接上报速度信息,需要进行上报速度的转换[6]。
本文提出的算法与某雷达项目中采用的点外推速度转换方法进行了对比,两种方法都假设目标是匀速运动的,接下来对这两种方法分别进行介绍。
点外推速度转换法,核心思想是把已知速度的雷达站的一点,根据速度外推得到另外一点,把这两点通过坐标转换,得到在另一雷达站中的坐标,然后求的该站坐标系下的速度,具体算法过程如下:
a.已知1#雷达站和2#雷达站的位置GPS坐标为 P(φ1,J1,H1)、Q(φ2,J2,H2),1#雷达站时刻 t1目标点M的坐标为M(x0,y0,z0),该点在1#站内的速度为 v1=(vx1,vy1,vz1)。
b.根式公式1、2分别求的1#雷达站与2#雷达站的地心坐标系。
c.根据公式4求的目标的地心坐标。
d.根据公式3,利用目标的地心坐标和2#站的地心坐标,求的目标在2#站内的坐标。
e.根据速度v1把目标点M外推到时刻t2,再重复(3)、(4)步骤,可以得到t2时刻目标在2#站内的坐标。
f.利用2#站内两点坐标值和时间差求的转换后的速度值 v2=(vx2,vy2,vz2)。
上述算法,虽然能够解决速度转换的问题,但是计算过程涉及到的矩阵运算较多,转换所需的计算量比较大。针对该问题,本文提出了一种利用全微分求转移矩阵的方法进行速度转换,本算法只需要进行一次矩阵相乘就能够求的新坐标系下的速度。在介绍具体算法前,先对本算法进行分析,描述其推导过程。
本算法应用环境目标是一匀速运动过程,已知1#站和2#站的地心坐标分别是x1=(x1,y1,z1)、x2=(x2,y2,z2),GPS 坐标值分别是 P(φ1,J1,H1)、Q(φ2,J2,H2),假设某一时刻在1#站内有一目标点的坐标为x10=(x10,y10,z10)。利用坐标转换公式

其中x00表示目标的地心坐标x00=(x00,y00,z00),上标T表示向量的转置;然后,根据目标的地心坐标x00和2#站的地心坐标x2,得到目标在2#站内的坐标 x20=(x20,y20,z20),具体转换过程:

把得到的式(5)带入式(6)得:


左右两面同时对时间t求导数,由于x1、x2与t无关,所以左右两边同时对t进行求偏微分,可以得到则可得到=H,其中v2是目标在2#站里的速度,v1是目标在1#站里的速度,H代表上式左边两矩阵的乘积。根据上述分析,目标速度转换可以直接通过1#站目标的速度与一转换矩阵H相乘即可。具体算法过程如下:
a.已知1#雷达站和2#雷达站的位置GPS坐标为 P(φ1,J1,H1)、Q(φ2,J2,H2),目标在 1#站内的速度是 v1=(vx1,vy1,vz1)。
b.根据 P(φ1,J1,H1)、Q(φ2,J2,H2),得到转换矩阵H。
4 仿真分析
本文利用matlab平台,对速度误差随两雷达站间距离变化的情况进行了仿真。假设单目标匀速飞行,协作雷达站(1#站)的位置固定,融合中心雷达站(2#站)通过经纬度的调节,距离逐渐增大,具体仿真参数见表2。

表2 仿真参数
a.雷达站距离近
从图4可以发现当两目标具体较近时,各个轴的速度误差相对比较小,即基本可以忽略,所以工程中大部分采用了直接上报本站航迹速度给融合中心。

图4 两站距离较近时的速度误差
b.雷达站距离远
从图5可以看出,当两站距离较远时候,各个坐标轴带来的速度误差较大,上图中z轴的速度偏差在200km处已经达到20m/s,主要原因是此时两站距离较远,受到地球曲面影响比较明显,速度不能直接平移到新的雷达站内,需要根据地球曲面的变化进行调整。

图5 两站距离较远时的速度误差
为了突出地球曲率的影响,下面仿真分析了一种极限情况,另一站绕地球一圈,通过仿真结果,观察影响速度偏差的主要因素。
c.绕地球一圈
从图6这种极限情况可以看出,速度误差并不是随着距离的增加递增的,误差最大值不是出现在距离最大的地方,主要是因为影响速度偏差的因素是地球的曲面,沿着地球面,相对1#站曲率最大的地方并不是在距离最远处;同时,通过第3节的分析,选取不同的坐标系,带来的各个轴的误差也会不同。

图6 两站距离较远时的速度误差
5 总结
本文通过介绍组网雷达系统中所用到的坐标系及它们之间的转换,讨论了工程中速度转换的方法,分析了地球曲率对目标速度误差的影响;并提出了一种利用求全微分矩阵的方法,进行速度转换。该方法较工程中应用的两点外推法,该算法的计算量和复杂度得到了有效降低,适用于雷达组网融合系统中目标速度在不同站点转换,具有有较高的理论价值和工程应用价值。
[1]金宏斌,徐毓,董峰.雷达信息处理系统中的坐标变换问题研究[J].空军雷达学院学报,2003.17(3):54-58.
[2]李杰涛,郭敏.雷达组网中的坐标变换问题[J].火控雷达技术,2007.36(1):38-42.
[3]何友,修建娟,张晶炜等.雷达数据处理及应用[M].北京:电子工业出版社,2008.
[4]李锋,金宏斌,马建朝.多雷达数据处理中坐标转换的新方法[J].微计算机信息,2007.23(2-1):203-305.
[5]石章松,刘忠等.目标跟踪与数据融合理论及方法[M].北京:国防工业出版社,2010.
[6]唐小明,王贞杰,张涛.GPS转换为雷达坐标的误差分析[J].雷达科学与技术,2012.10(3):246-256.
