解卷积锐化算法在导引头前视成像中的应用
2014-06-23吴一龙万红进刘辉磨国瑞
吴一龙 万红进 刘辉 磨国瑞
(西安电子工程研究所 西安 710100)
0 前言
本世纪的几次局部战争经验表明,与常规武器相比,精确制导武器的作战效能有着显著提高。雷达制导技术虽有较好的全天候性能和对目标的快速搜索能力,作用距离远,但目标分类识别能力较差,利用雷达成像技术可以提高目标识别和抗干扰能力。在运动平台下的雷达对地成像过程中,为了获得方位高分辨率,在弹目夹角较大时,往往采用合成孔径雷达(SAR)或多普勒波束锐化(DBS)技术,此类技术的共同点是利用成像区内不同散射点间多普勒频率的差异来实现目标在方位向上的分辨,具备全天时、全天候、高分辨的特点。然而,随着弹目夹角降低或者变为零时,回波的距离-方位信息耦合程度会逐渐加深,导致SAR与DBS技术的方位分辨率急剧下降,形成前视成像盲区。通常多在弹目夹角大于30°时使用SAR成像,在弹目夹角处于10°至30°时使用DBS成像。
在前视成像状态下,通常采用实波束成像,但由于使用条件的限制,不能直接将天线孔径做成满足方位精度需求的尺寸[1],所以使用实波束成像虽然可以一定程度上弥补SAR与DBS技术前视成像的不足,但其角度分辨率仍然较低,无法满足实际应用的需求,因此需要对实波束进行锐化。本文采用解卷积方式对实波束进行锐化。
1 解卷积成像算法原理分析
众所周知,雷达传感器输出的时间序列信号在方位域可视为天线波束与目标角度信息的卷积,在距离域可视为发射信号与目标距离向RCS信息的卷积[6],因此目标的距离和角度信息会得到一定程度的展宽。当两个目标处于同一波束内时,每个目标的回波信息会发生重叠,通过实波束无法区分两个目标。此时若直接进行实波束成像,则无法得到准确且清晰的目标图像。为了得到目标确切的位置信息,需要对波束进行锐化。
通过提升器件性能来得到窄波束的方式很大程度上被技术条件所限制,需要从算法的角度来寻找实现波束锐化的方法。由于回波信息实际上是目标信息和天线波束卷积得到,理论上可以通过解卷积的方式得到目标的位置信息。解卷积实际上是一种压缩波束的方法,可以把天线波束等效压缩变窄,从而获得较高的测向精度和角分辨力。
利用天线方向图解卷积的过程如图1所示。

图1 天线方向图解卷积示意图
天线扫描过目标后得到的回波为天线方向图与目标位置信息的卷积,通过将回波与天线方向图解卷积,即可得到目标的位置信息。
假设某一点目标的位置信息为S()t,天线的方向图为F()t,整个系统噪声为N()t,则该目标的雷达回波满足

为了求解方便,我们先将关系式转化到频域,即有

通常情况下,我们很容易知道X()ω、F()ω的频谱,只需要根据已知求得有关目标的函数S()ω。
短短2个小时的访谈,3万多字的记录,原本4页的人物故事,被扩展成6页,还外加3篇文章。因为,写他的人虽多,但一席谈之后,发现他身上真的有很多值得大家关注和学习的地方,包括一开始就能对自己的选择作出分析和规划,还有选择之后找对方法并一直不懈坚持,更有他的谦和和责任感,还有对给予了他所有一切的葡萄酒的这份回馈之心。
因此有

当目标回波的信噪比较高时,即满足N()ω≪X()ω时,有S()ω≈X()ω/F()ω。
最后将S()ω再转化到时域,就得到需要的S()t。
2 波束锐化算法分析
该文献所提出的多通道解卷积算法要求每个通道的卷积器互质,并且每个通道的卷积器与解卷积器的乘积之和为1。由于通道卷积器互质,因此在实际工作时只有一路通道解卷积是有解的,多通道的意义在于在某一路通道无解时可以由另一路通道完成解卷积计算,多通道解卷积实际上是对多个卷积器互质的单通道解进行遍历。而由于体积的限制,弹体不可能安装太多的天线,因此多通道解卷积方式受到很大的限制。
想要避免无解的情况发生,就要减少N()ω扰动造 成 的 影 响。因 此 需 要 满 足 X(ω)H(ω)>N(ω)H(ω)。也即满足X()ω>N()ω这一条件。因此提高X()ω/N()ω,也即提高回波的信噪比,有助于避免无解的情况发生。
设天线的扫描速度为ω,脉冲重复时间为T,则天线扫描的步进量为ωT,若已知天线的3dB波束宽度θ3dB,则同一个目标最多积累的次数为n=2θ3dB/ωT。通过相参积累后,信噪比提高程度和脉冲积累次数n有关。若回波信噪比较高,可以进行快速扫描,减少积累时间,提高运算速度;若回波信噪比较低,则需要进行慢速扫描,增加积累时间。可以看出,通过脉冲积累,使一些原本信噪比不高目标也能够用波束锐化算法进行处理,增大了算法的应用范围。
当对回波进行相参积累时,系统采用如下的扫描方式。根据天线扫描的步进量,将天线主瓣的方向图和扫描区域划分成若干个小区域,按照一定的方式,将每次的回波以矩阵的方式存储下来,经过处理后,根据天线和目标的相对运动状态,再按照角度将对应的项进行积累[7-8],最终得到所需的结果。
另外,为了得到更好的锐化效果,天线方向图必须与回波匹配。对于不同的目标,天线方向图需要的最小宽度也不相同。后向散射系数较大的目标所必须的方向图宽度小,后向散射系数较小的目标所必须的方向图宽度大。当天线方向图截取的宽度小于必须宽度时,会导致目标积累次数不足,造成目标淹没在杂波当中而无法分辨;当天线方向图截取的宽度大于必须宽度时,尽管一些无用的噪声信号也被引入,增加了噪声的输出功率,但经过算法处理后,这些噪声只是抬高了噪声幅度,并不影响目标的分辨和最终成像。
通常情况下,目标回波的强弱程度和许多因素有关,对其量化是一件比较困难的事情,并且我们无法预知目标信号的强弱,因此普遍采用3dB波束宽度,这样既保证了回波能量的充分利用,不会引入过多无用的噪声,也可以满足大多数目标的处理需求。
3 成像算法仿真及分析
图2是利用理想天线方向图和仿真获得的角度相隔很近的两个理想目标回波,其中波束宽度(3dB):1.4°;目标角度:-0.22°,+0.22°。

图2 前视成像方位超分辨仿真
可以看出,当两目标相距较近时,无法直接通过雷达回波判断目标个数以及目标的确切位置,而通过解卷积算法处理后,可以很好的区分这两个目标,并且得到目标正确的角度值,波束锐化比实波束至少提高了3倍。理论上只要信噪比足够,解卷积算法的角分辨率就可以非常高。本文对实测数据进行处理时,波束锐化比提高了14倍。
和解卷积算法相比,单脉冲测角因其算法复杂度较小而得到了较广泛的应用,但单脉冲测角无法在真正意义上区分处于同一波束内的两个目标,它主要是根据回波对某一目标的位置进行重新定位,以得到更清晰的雷达图像[5]。因此单脉冲测角需要事先知道目标的个数和大概位置。另外,和差比幅单脉冲测角对杂波也有一定的要求。当杂波类型是点杂波时,单脉冲能较好的区分多个目标;当杂波类型是面杂波时,单脉冲测角的波束锐化效果大大下降。文献[7]对不同目标强度下的单脉冲成像进行了仿真。
和单脉冲测角相比,在信噪比较低时,两种方法都需要通过相参积累提高信噪比。而在信噪比较高时,解卷积算法能够从真正意义上区分处于同一波束内的两个目标。
为了进一步验证波束锐化算法的有效性,我们对实测数据进行处理。系统采用扫描工作方式,对导引头前方的一片区域进行了扫描,其中,天线波束宽度(3dB)为1.4°,发射W波段的线性调频信号,带宽为16MHz,脉冲重复频率10kHz,天线扫描速度0.1°/s。通过实波束成像得到的图像如图3所示。
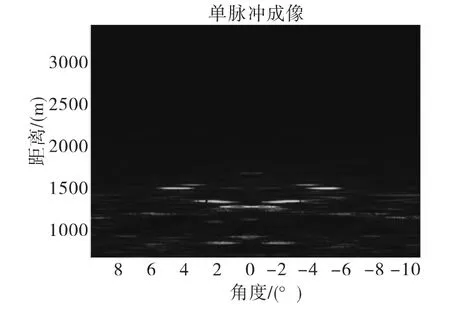
图3 目标区域实波束成像图
由于数据量的问题,我们经过对距离大约1500m,角度在4°~6°处的目标分析,得知该目标的信噪比大约在19dB,对其进行波束锐化处理,来验证锐化效果。最终得到的结果如图4所示。

图4 回波锐化处理前后波形图
图4中,(a)图是目标回波经过锐化算法处理前的波形,(b)图时目标回波经过锐化算法处理后的波形。可以看出,锐化算法很好的恢复了目标的位置信息。由于实测数据的数据量较大,故而在进行波束锐化处理时,对原始数据进行了一定程度的抽取,因此两图中角度单元的点数不同,但这并不妨碍对波束锐化算法的验证。
图5中,(a)图为进行波束锐化后的结果,(b)图为进行波束锐化前的结果。可以看出,未经过锐化处理时,目标几乎占据了整个3dB波束宽度,而经过解卷积算法锐化后,目标占据的角度宽度大幅减小,波束锐化效果十分明显。

图5 目标区域锐化处理前后成像对比图
4 结束语
通过以上的仿真及实测数据的处理结果,解卷积算法的有效性得到了验证。在实际应用中,除了要确定目标的方位角以外,有时还需要确定目标的俯仰角,而俯仰角维度同样可以通过解卷积算法进行处理,得到比实波束时更精确的俯仰角信息。理论上,为了进一步提高波束的锐化程度,在条件允许时还可以采用多通道解卷积的方式。
由于单脉冲成像方式与弹目夹角没有关系,能够在任意弹目夹角下进行成像,弥补了SAR成像和DBS成像的不足,而传统的实波束成像由于条件限制,角度分辨率又无法满足要求。本文采用的算法以实波束成像为基础,采用解卷积方式并对其进行锐化处理,既满足了前视成像的需求,又能够得到较高的角度分辨率。
[1] 贺林峰.单脉冲成像[D].武汉:华中科技大学.2008.
[2] 丁鹭飞,耿富录,陈建春.雷达原理(第四版)[M].北京:电子工业出版社.2012.
[3] 张明友,汪学刚.雷达系统(第三版)[M].北京:电子工业出版社.2011.
[4]雷璐.基于单脉冲测角技术的雷达高分辨率三维成像方法研究[J].科技创新导报.2010,(9):4-5.
[5]吴迪,朱岱寅,田斌,朱兆达.单脉冲成像算法性能分析[J].航空学报.2012,33(10):1905-1914.
[6]李悦丽,梁甸农,黄晓涛.一种单脉冲雷达多通道解卷积成像方法[J].信号处理.2007,23(5):699-703.
[7]吴迪,朱岱寅,朱兆达.机载雷达单脉冲前视成像算法[J].中国图像图形学报.2010,15(3):462-469.
[8]施云飞,宋千,金添,周智敏.前视成像雷达图像序列配准算法研究[J].电子与信息学报.2011,33(6):1427-1433.
