人工角反射器辐射特性及其像素级精定位参数
2014-06-22张桂芳郭利民单新建屈春燕
张桂芳 郭利民 单新建 屈春燕
(中国地震局地质研究所,地震动力学国家重点实验室,北京 100029)
0 引言
雷达遥感中的角反射器是指能够对雷达波束产生强烈反射,并且使其能够逆向反射的地物。雷达角反射器可分为两大类:一是天然角反射器,即永久散射体(PS点),一般指靠向雷达波束入射方向的裸露山峰、山脊、巨石等天然地物,还包括尺寸不统一和形状不规则的人工地物,如靠近水面的金属塔、路面、堤岸等;二是人工角反射器(CR点),特指那些利用导电性能和导磁性能良好,电容率大的金属材料做成的一种点状人工地物目标。角反射器最初被用于雷达系统的外部定标(Ulander,1991;Mohr et al.,2001)。
CR-InSAR技术是对危险地段特定结构(活动构造、大坝、桥梁和核电站等)形变监测的有效手段,在进行构造微形变监测时,安装在活动断层两侧的角反射器可补充构成高精度控制点网络(张景发等,2006)。利用CR-InSAR技术对形变进行监测的文献很多:Xie等(2002,2004,2008)最早利用人工角反射器方法对滑坡进行监测;程滔等(2007)提出了CR和PS两种高相干散射点联合解算算法;Renaud等(2010)用2台CR监测冰川移动速率;邢学敏等(2011)利用CR-InSAR与PS-InSAR联合算法探测区域线性沉降;许才军等(2012)利用CR-InSAR技术进行鲜水河断层的形变速率监测。尽管国内外学者开展了CR技术用于形变监测的研究,但都侧重于论述CR点形变获取方法,而对CR点像素级精确定位提及的甚少。在能查阅到的几篇相关文献中(Sakurai-Amano et al.,1999;范景辉,2008;Renaud et al.,2010),均利用搜索最大幅度值定位角反射器像素。但由于角反射器散射幅度受背景影响大,加之聚焦性差,会使复杂背景条件下的角反射器出现定位偏差。
角反射器微形变研究需要解决的第1个难题是角反射器的精确定位。如果角反射器定位错误,那么基于角反射器的形变研究除了得到错误结论外,就没有任何意义了。本文将通过分析角反射器影像特征,确定角反射器精确定位的最佳参数。
1 数据介绍及其预处理
研究区位于北京西北部的延怀盆地及其周边地区,图1中三角形给出的是研究区内架设的三角形三面角角反射器,角反射器(特指三角形三面角角反射器,下同)实物照片见图2。文中用到2种SAR数据:一种数据是c波段的ENVISAT ASAR的升轨数据,波长为5.6cm,获取时间是2008年12月12日,其覆盖范围见图1中黑色实线,有18台角反射器被其覆盖;另一种数据是x波段的TerraSAR升轨数据,波长是3.1cm,获取时间是2012年12月6日,其覆盖范围见图1中黑色虚线,有12台角反射器被其覆盖;有7台角反射器同时被上述2种数据覆盖(表1)。

图1 Envisat数据(黑色实线方框)和TerraSAR数据(黑色虚线方框)覆盖范围以及角反射器分布图(白色三角)Fig.1 The coverage area of Envisat and TerraSAR data,and CRs distribution map.

图2 研究区内角反射器照片Fig.2 Photograph of CR.
SAR系统能以图像的形式记录地物后向散射电磁波的幅度和相位信息,根据雷达波与地物所产生的不同散射机制,可以将地面目标分为两大类:点目标和分布目标。点目标是在像素分辨单元内占主导地位的散射体,在进行距离向和方位向多视处理时,其光谱能量基本保持不变。考虑点目标这一特性,基于SLC(Single Look Complex)图像的频谱差异(spectral diversity)性,设置距离向和方位向视数为4,用3×3的像素窗口统计生成强度图、光谱相关图和光谱离散指数图。
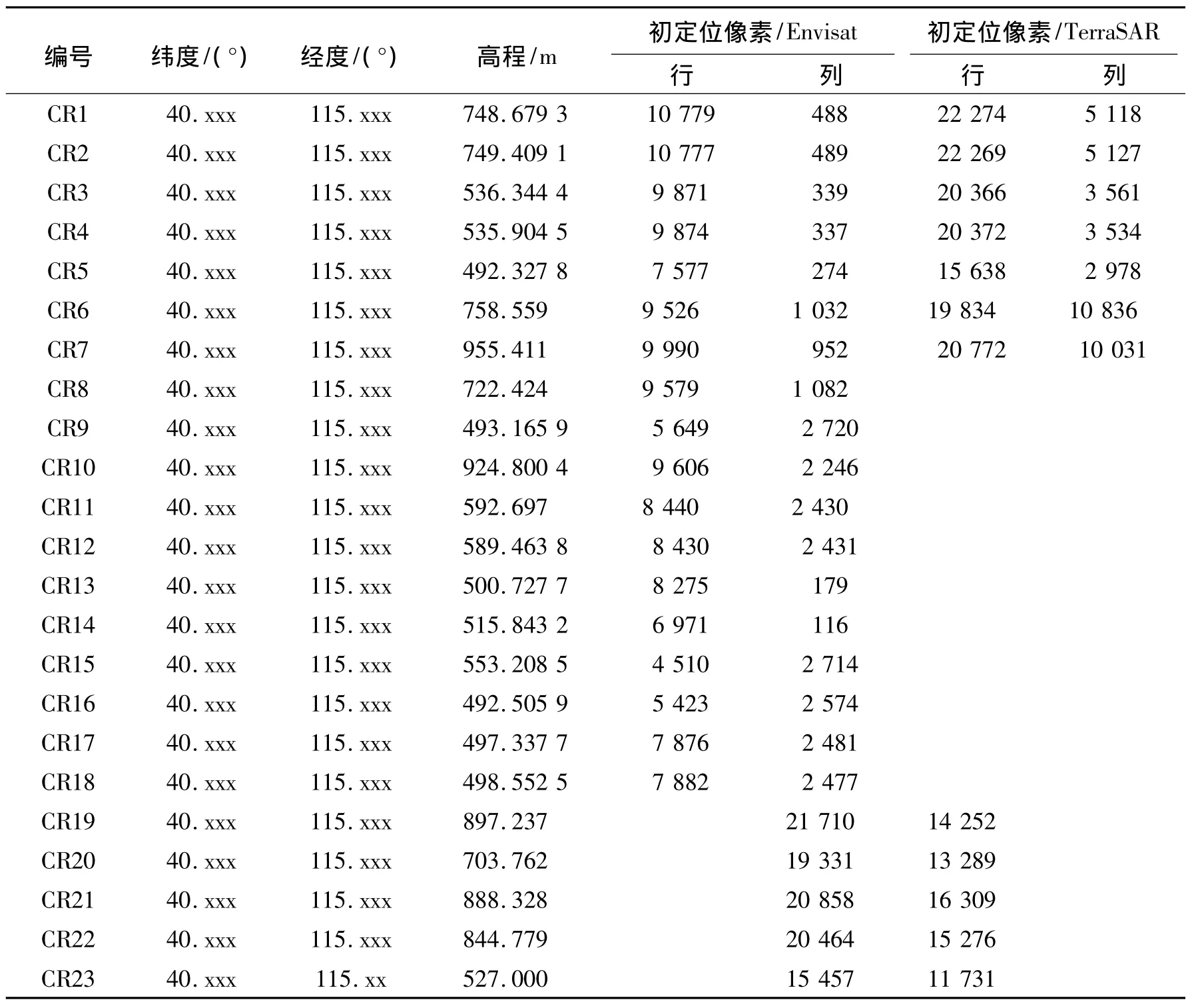
表1 角反射器初始定位像素Table 1 The initial pixels of CRs
2 角反射器初始定位
利用GPS定标得到的实测角反射器三维信息一般是以WGS84椭球体为基准,用大地坐标系下的纬度、经度、高程来表示,即(Φ,Λ,h),而ENVISAT卫星的状态矢量是在以WGS84椭球体为基础的地心旋转(Earth Centered Rotating,ECR)坐标系中进行描述的,也称地心直角坐标系(范景辉,2008)。要在影像上对角反射器定位,首先需要进行坐标转换,也就是大地坐标向ECR坐标转换,即P(Φ,Λ,h)→P(X,Y,Z)。在DORIS精确轨道进行校正后的SLC参数文件中提供了有限的卫星位置数据,为了获得SAR影像中任意一行对应的卫星位置矢量,需对精轨数据进行插值,得到卫星位置矢量和速度矢量随成像时间t的函数。对于已处理至零多普勒成像参数的SLC数据,一行像元对应着同一成像时间tl,在与SLC对应的参数文件中,给出了SLC数据成像的开始时刻t0,以及每行数据对应的时间间隔Δtl。
作为一种利用了合成孔径技术的雷达系统,SAR不仅可以通过记录地物反射信号的时间信息求得传感器与地物目标间的距离,还能记录下地物反射信号的多普勒信息。基于SAR数据的这些特点,研究者发展了距离-多普勒模型(R-D模型)(Curlander,1982),用以描述卫星状态矢量、地面目标状态矢量、成像参数以及参考椭球体之间的关系。利用R-D模型,采用牛顿迭代法(李庆扬等,2000;范景辉,2008)可以求解出角反射器瞬时成像时间t。则角反射器所在像素的行l和列s可分别用下面的公式来计算:

式(2)中:ceil(l)表示对l向上取整;r_s表示距离向采样数。表1中分别列出了研究区内角反射器在Envisat数据和TerraSAR数据中初始像素位置。
3 角反射器辐射特性研究
3.1 RCS定义
雷达横截面是描述目标回波强度的物理量,简称RCS。RCS的正式定义为(Merrill,2008):

式(3)中:R是目标到雷达的距离;E0是目标接收到的入射波电场强度;Es是目标散射波的电场强度。
简单角反射器RCS的近似值可表示为

式(4)中:Aeff是贡献多重内部反射的有效面积,可以通过对每个反射面在视线方向的投影面积求和来确定(Kbittm,1981);λ是入射波波长。
由式(4)可知:角反射器RCS主要与其有效面积和接收的入射波波长有关。除了用m2为单位反映雷达散射截面外,另一种更通用的方法是用雷达散射截面对数值的10倍来表示,符号是σdBsm,单位是分贝平方米(dBsm),即σdBsm=10lgσ。
3.2 角反射器影像特征分析
SAR以图像的形式记录角反射器后向散射电磁波的幅度和相位信息,将幅度值定标并平方后就可得角反射器的强度图,在强度图上可求得角反射器RCS,单位是m2。角反射器对SAR的后向散射信号可看作是脉冲响应函数(Curlander,1991),则角反射器的回波信号包络面可表示为(薛笑荣等,2009):

式(5)中:x为方位角(azimuth coordinate),t为斜距时间(slant range time),Ls为合成孔径长度;τp为脉冲长度;ρr为斜距向分辨率;ρa为方位向分辨率。
由式(5)可知,在理想状态下,角反射器强度在斜距向和方位向都呈现为sinc函数形状,其模拟图像是对称的十字型。
当波长、入射角等成像参数为同一模式的SAR传感器对角反射器成像时,角反射器表现出强而稳定的后向散射特性,由于回波信号较强,角反射器在强度图上表现为比较亮的色调。在进行角反射器初定位后,截取大小为25×25像素的影像图,在ENVISAT数据的强度图中18台角反射器表现为亮点(图3),而在TerraSAR数据的强度图中12台角反射器均表现出十字型特征(图4)。角反射器模拟强度图像是十字型,但在实际的SAR强度影像中,角反射器的影像特征主要受其信号强弱的影响。由式(4)可知,当角反射器安装固定后,其后向散射的强度主要受波长影响,波长越短,角反射器后向散射的强度值越大,所以角反射器在TerraSAR数据的强度影像呈十字型。
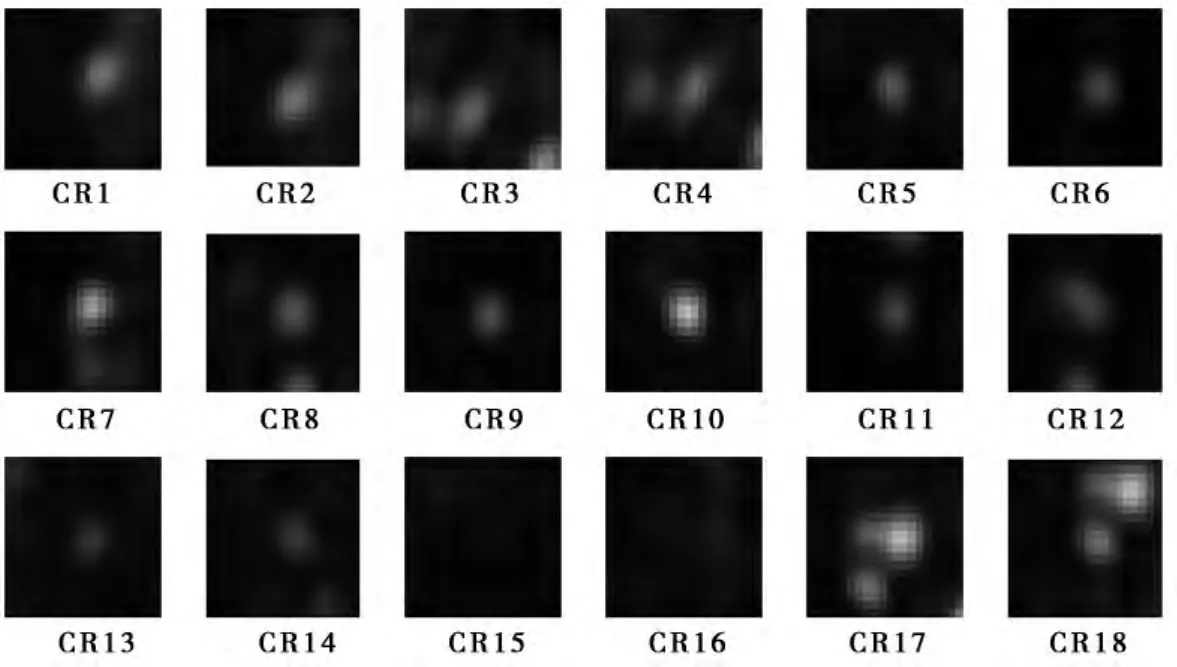
图3 角反射器在Envisat数据中的强度图像Fig.3 The intensity image of CRs in Envisat data.
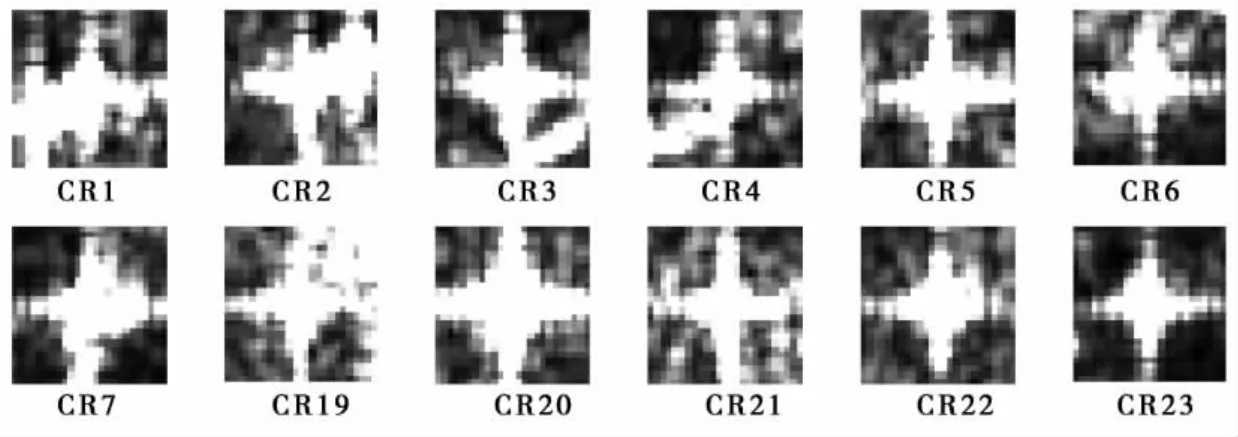
图4 角反射器在TerraSAR数据中的强度图像Fig.4 The intensity image of CRs in TerraSAR data.
MSR图像是光谱信息在距离向和方位向上,取不同带宽进行多视处理后统计的均值和标准差的比率。在ENVISAT数据的MSR图像上,由于角反射器的MSR统计值与背景值差别很小,所以18台角反射器在MSR图像中无法分辨,图像都为黑色(图5)。在TerraSAR数据的MSR图像上(图6),尽管角反射器MSR影像特征明显,但表现在多个像素上。
相关图像记录的是在进行多视处理时光谱的相关性信息。相关性指标的优势在于点目标的高相关值通常仅聚焦在一个像素内。图7和图8分别是ENVISAT数据和TerraSAR数据5×5像素大小的角反射器相关图像,从每个角反射器对应的相关图像上能够直接分辨出中间像素的相关值比较高。
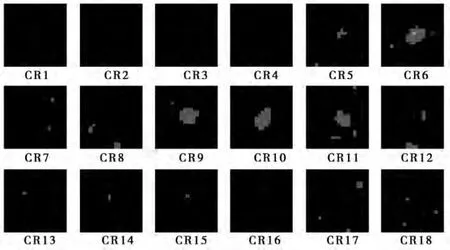
图5 角反射器在ENVISAT数据中的MSR图像Fig.5 The MSR image of CRs in Envisat data.

图6 角反射器在TerraSAR数据中的MSR图像Fig.6 The MSR image of CRs in TerraSAR data.

图7 角反射器在ENVISAT数据中的光谱相关图像(5×5)Fig.7 The spectral correlation image of CRs in Envisat data.

图8 角反射器在TerraSAR数据中的光谱相关图像(5×5)Fig.8 The spectral correlation image of CRs in TerraSAR data.
在强度图像中角反射器影像特征明显,但角反射器的强度体现在相邻多个像素中;角反射器影像特征在MSR图像中表现不明显;在相关图像上角反射器影像特征没有强度影像特征明显,与强度图像相比需要放大25倍才能识别出角反射器相关信息,但角反射器的相关信息聚焦在一个像素内,而且相关值明显高于周边像素,这使角反射器定位容易而且准确。
4 角反射器精定位最优参数的选择
选用反映角反射器辐射特性的3个参数:强度σ、相关系数γ、平均值与标准差的比率MSR来研究角反射器精确定位。Envisat数据中角反射器初定位结果在行值上有4行的系统误差,以系统误差校正后的行列值为中心,在5×5窗口内搜索,最大值σ和γ值对应的像素位置定为角反射器行列值。因为角反射器参数MSR与背景差别极小(图5),所以对参数MSR不做数值分析。表2中列出了强度σ和相关系数γ的最大值,以及分别用这2个参数确定的角反射行列值。在表2中粗体字给出的是2个参数定位结果不同的7台角反射器,这7台角反射器在行或列上有1个像素差别。图9描述了这7台角反射器不同参数定位结果对应像素的相位对比结果。图中每一组中间的绿色柱是角反射器所在像素的相位,左右2个柱状图是与角反射器同行相邻2个像素的相位;上图是用参数σ定位的角反射器及同行相邻像素的相位值,下图是用参数γ定位的角反射器及同行相邻像素的相位值;上下图对比可知,下图每组同行相邻的3个像素相位值符号相同,而且数值差别小于上图每组3个像素之间相位的差别。其他11台角反射器2个参数定位结果相同,角反射器像素和同行相邻像素的相位差别也很小(图10)。表2中角反射器CR1和CR2相距约50m,CR3和CR4相距约90m,这2组角反射器因距离近,强度值彼此影响的原因,所以选用强度参数定位的结果是同一像素。
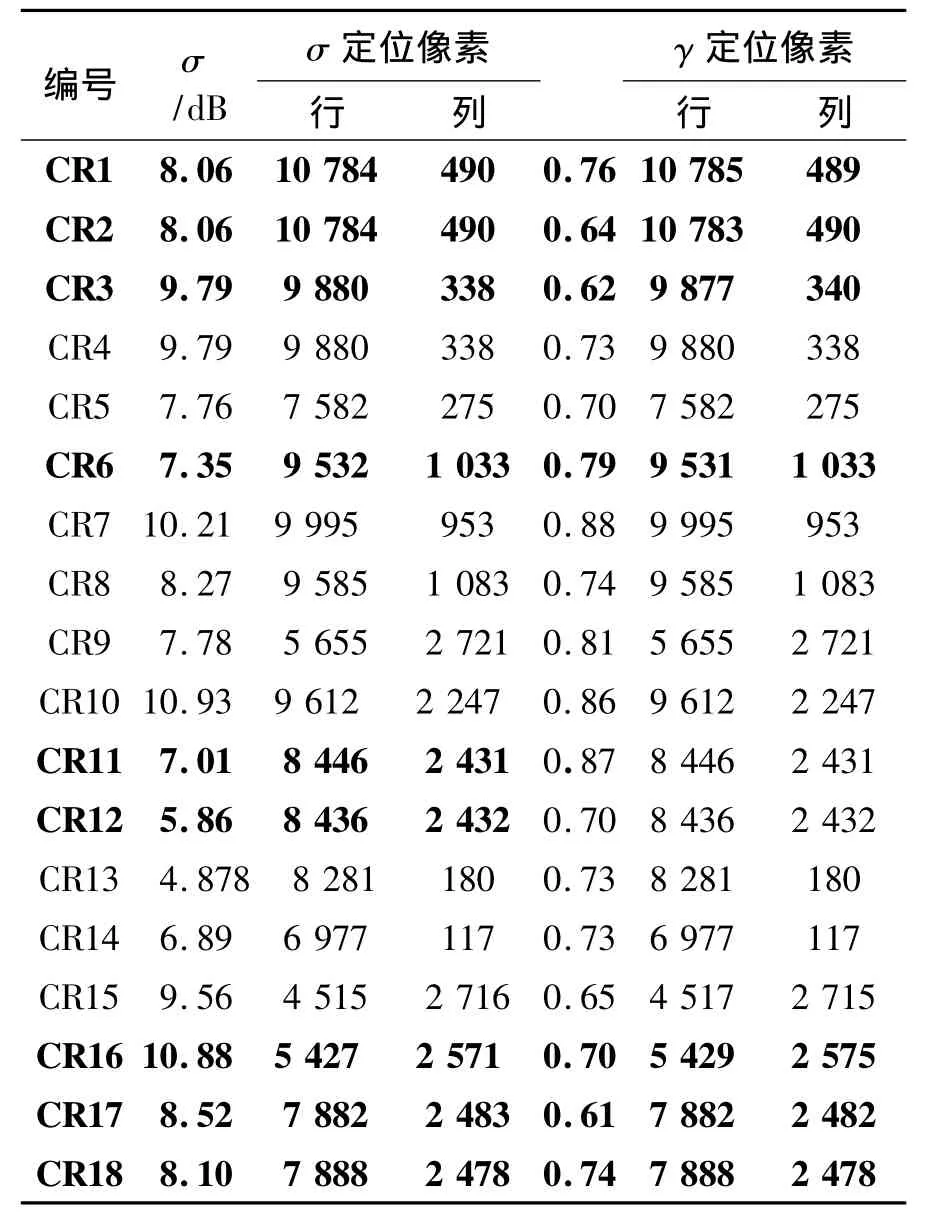
表2 Envisat数据参数最大值及其定位行列值Table 2 The max value of parameters and the pixels of CRs located by these parameters in Envisat data
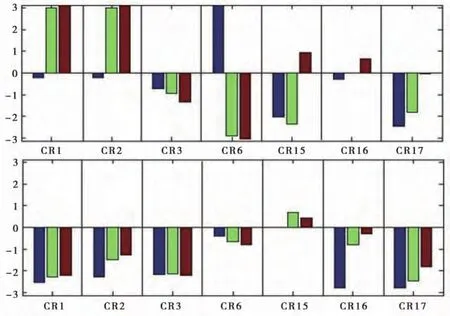
图9 Envisat数据中不同参数定位角反射器相位对比图(纵轴为弧度)Fig.9 The phase contrast figure of CRs located with different parameters in Envisat data(Y-axis is radians).

图10 Envisat数据中角反射器及同一行左右相邻像素相位图(纵轴为弧度)Fig.10 The phase of CR and its adjacent pixels at same line in Envisat data(Y-axis is radians).
在Envisat数据中,通过对角反射器定位后的强度、相关性和相位特性的分析可知,角反射器在Envisat数据中的强度受背景干扰大;角反射器的相关性聚焦性好,不受背景影响;用相关性参数定位后的角反射器对应相位稳定,表现在角反射器相位值和同行相邻的2个像素相位值差别小。而在TerraSAR中,角反射器散射幅度强,强度信息受背景干扰性小,所以在用强度参数和相干性参数定位的角反射器位置基本一致,只有表3中粗体字所示1个角反射器像素位置在行上差一个像素;而用MSR定位的角反射器像素位置与表3中前2个参数定位的像素行列值都有差别。图11是TerraSAR数据用参数γ定位角反射器及其周围8邻域像素的相位柱状图,可见角反射器及其周围像素的相位值基本相等,这是角反射器强散射效应的结果,据此说明了用参数γ定位角反射器像素位置的准确性。
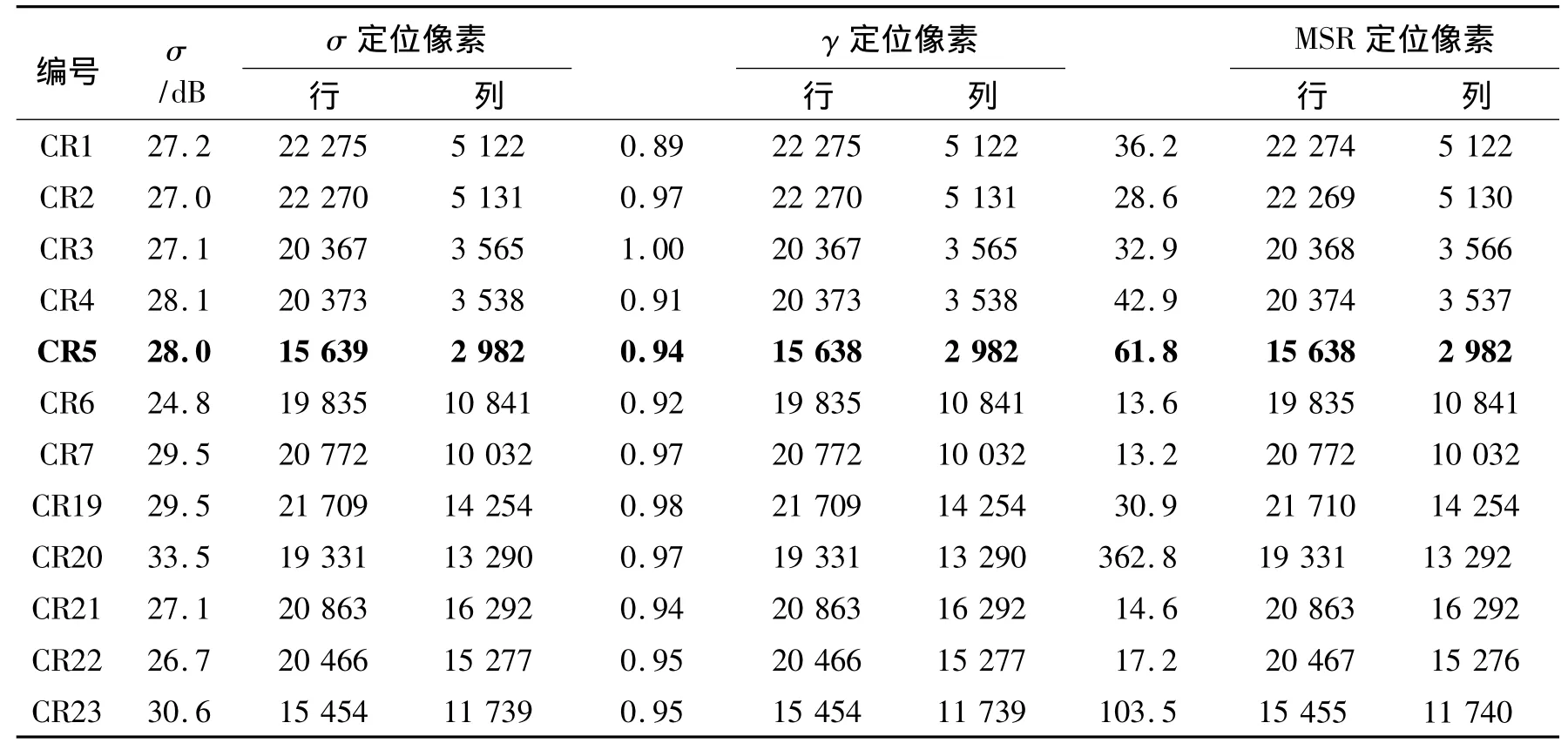
表3 TerraSAR数据定位参数及其定位行列值Table 3 The max value of parameters and the pixels of CRs located by these parameters in TerraSAR data

图11 TerraSAR数据中角反射器及其8邻域像素相位图(纵轴为弧度)Fig.11 The phase of CR and its 8 neighborhood pixels in TerraSAR data(Y-axis is radians).
5 结论与讨论
(1)分析总结了Envisat、TerraSAR两种数据对应的角反射器强度、相关性和MSR影像特征:1)角反射器强度影像特征明显,在多个像素中呈现,Envisat数据中角反射器强度表现为亮点,而在TerraSAR数据中则呈现明显的十字形状;2)相反角反射器MSR影像特征不明显,仅在TerraSAR数据中有影像特征;3)在2种数据中,角反射器的相关性都聚焦在一个像素内,而且相关值明显高于周围像素。
(2)对比分析不同参数定位出的角反射器像素位置及其对应的相位信息可知:1)不同参数定位角反射器像素位置稍有不同,但对应相位差别很大;2)参数γ定位角反射器像素的相位比较稳定,体现在Envisat数据中角反射器像素和同行上相邻像素的相位值差别小,而TerraSAR数据中角反射器及其8邻域像素的相位值基本相同,这是角反射器强散射效应抑制噪声的结果;3)Envisat数据中角反射器像素和同行上相邻像素的相位值差别小,表明角反射器效应在方位向(也就是卫星飞行方向)表现明显,这可能与传感器按行记录回波信息有关。
(3)本文结果表明参数γ定位角反射器像素位置较其他参数准确,下一步的研究工作将在时序影像集中进一步检验这一结论。
程滔,单新建.2007.CR、PS干涉测量联合解算算法研究[J].地震,27(2):64—71.
CHENG Tao,SHAN Xin-jian.2007.Research on algorithm of CRInSAR and PSInSAR combined calculation [J].Earthquake,27(2):64—71(in Chinese).
范景辉.2008.基于相干目标的DInSAR技术地表形变监测研究与应用[D]:[学位论文].北京:中国科学院遥感应用研究所.82—87.
FAN Jing-hui.2008.Research on coherent targets based DInSAR technique and its applications to surface deformation monitoring[D].PhD Dissertation.Institute of Remote Sensing Applications,Chinese Academy of Sciences,Beijing.82—87(in Chinese).
李庆扬,关治,白峰杉.2000.数值计算原理[M].北京:清华大学出版社.
LI Qing-yang,GUAN Zhi,BAI Feng-shan.2000.Numerical Calculation Principle[M].Tsinghua University Press,Beijing(in Chinese).
邢学敏,丁晓利,朱建军,等.2011.CRInSAR与PSInSAR联合探测区域线性沉降研究[J].地球物理学报,54(5):1193—1204.doi:10.3969/j.issn.0001-5733.2011.05.008.
XING Xue-min,DING Xiao-li,ZHU Jian-jun,et al.2011.Detecting the regional linear subsidence based on CRInSAR and PSInSAR integration[J].Chinese J Geophys,54(5):1193—1204(in Chinese).
许才军,何平,温扬茂,等.2012.利用CR-InSAR技术进行鲜水河断层的形变速率监测[J].武汉大学学报· 信息科学版,37(3):302—305.
XU Cai-jun,HE Ping,WEN Yang-mao,et al.2012.Crustal deformation monitoring of Xianshuihe Fault by CRInSAR[J].Geomatics and Information Science of Wuhan University,37(3):302—305(in Chinese).
薛笑荣,王爱民,曾琪明.2009.基于图像模拟的SAR图像角反射器检测方法研究[J].安阳师范学院学报,5:69—72.
XUE Xiao-rong,WANG Ai-min,ZENG Qi-ming.2009.Research on SAR image corner reflector detection method[J].Journal of Anyang Normal University,5:69—72(in Chinese).
张景发,龚利霞,姜文亮.2006.PS-InSAR技术在地壳长期缓慢形变监测中的应用[J].国际地震动态,6:1—6.
ZHANG Jing-fa,GONG Li-xian,JIANG Wen-liang.2006.Application of PSInSAR technique to measurement of long-term crustal deformation[J].Recent Developments in World Seismology,6:1—6(in Chinese).
Curlander J C.1982.Location of space-borne SAR imagery[J].IEEE Transactions on Geoscience and Remote Sensing,20(3):359—364.doi:10.1109/TGRS.1982.350455.
Curlander J C,McDonough R N.1991.Synthetic Aperture Radar[M].Wiley Interscience,New York,p396.
Kbittm E F.1981.A tool for predicting the radar cross section of an arbitrary corner reflector[R].IEEE Southeastcon’81 Conference,17—20.
Mohr J J,Madsen S N.2001.Geometric calibration of ERS satellite SAR images [J].IEEE Transactions on Geoscience and Remote Sensing,39(4):842—850.doi:10.1109/36.917909.
Merrill I S.2008.Radar Handbook(Third Edition)[M].Publishing House of Electronics Industry.545.
Renaud F,Olivier H,Emmanuel T,et al.2010.Monitoring temperate glacier displacement by multi-temporal TerraSAR-X images and continuous GPS measurements[J].IEEE Journal of Selected Topics in Applied Earth Observation and Remote Sensing,1—26(submitted).doi:10.1109/JSTARS.2010.2096200.
Sakurai-Amano T,Kobayashi S,Fujii N.1999.Detection of singular corner reflectors in residential and mountainous areas from SAR images[A].In:IEEE Proc,1999 International,2:1454—1456.doi:10.1109/IGARSS.1999.774662.
Ulander L M.1991.Accuracy of using point targets for SAR calibration[J].IAE,27:139—148.doi:10.1109/7.68156.
Xie Ye,Kaufmann H,Xiaofang G.2002.Differential SAR Interferometry Using Corner Reflectors[A].In:IEEE Proc,2002 International Geoscience and Remote Sensing Symposium,2:1243—1246.doi:10.1109/IGARSS.2002.1025902.
Xie Ye,Kaufmann H,Xiaofang G.2004.Landslide monitoring in the Three Gorges area using D-InSAR and corner reflectors[J].Photogrammetric Engineering and Remote Sensing,70(10):1167—1172.
Xie Ye.2008.CR-Based SAR-Interferometry for landslide monitoring[A].In:IEEE Proc,2008 International Geoscience and Remote Sensing Symposium,2:1239—1242.doi:10.1109/IGARSS.2008.4779226.
