基于双DSP-FPGA架构的城轨列车电力牵引控制系统
2014-06-22刁利军赵雷廷
刁利军 董 侃 赵雷廷 王 磊 陈 杰
(北京交通大学电气工程学院 北京 100044)
1 引言
随着我国城市化进程的加快,包括地铁、轻轨、有轨电车等方式的城市轨道交通(简称“城轨”)越来越便利了人们的出行,同时,城轨在节能、环保、土地综合利用、缓解交通阻塞等方面也具有明显的优势。我国城轨正处于快速发展时期,到2015年前后,全国将建设 87条城市轨道交通线路、总里程2 400多公里,总投资9 886亿元[1]。城轨的快速发展,一方面为城轨产品提供了巨大的市场空间,另一方面,也给我国城轨相关企事业单位的科研工作者们提供了将自主创新成果投入应用的机会,提升了科研创新平台的水平。
牵引控制系统是城轨列车电力牵引系统的核心,主要负责完成列车通信、车辆控制和电机控制及其扩展功能,综合了微机控制、网络通信、数字信号处理等技术。目前,电力电子控制系统模式可以简单概括为主要有三种:纯定点DSP模式[2]、纯FPGA模式[3]、DSP+FPGA混合模式[4,5]。单纯的定点DSP模式一般用于控制算法不是很复杂、精度及实时性要求不是很高、接口及通信简单的场合,如风机电源、通用变频器等;纯FPGA模式充分发挥了其并行处理的优势,原理上可以实现所有高实时性的控制算法、控制逻辑和通信功能,但由于集成度及编程语言的限制,目前的开发难度要高得多。所以,针对列车牵引控制的复杂需求,目前多采用混合模式,把DSP的数字信号处理能力与FPGA的并行处理能力相结合,开发难度适中,也能很好地满足列车牵引系统控制的要求。目前国外成熟的系统如 Siemens的 SIBAS、Bombardier的MITRAC、Alstom 的 AGATE、Shinkansen的 TIS[6]、ABB的AC 800PEC[7]等大多采用了类似的架构方式;而现有国内自行研发的列车牵引控制系统,其架构中控制单元多采用单片定点DSP,或定点、浮点DSP结合,通过双口RAM进行数据交互,这种架构简单,容易开发,但对于数据采集、算法处理、控制逻辑等多任务、多速率的实时处理能力不足,不能满足列车牵引系统高性能实时控制的要求。
本文基于城轨列车电力牵引系统的基本原理和控制方法,通过分析牵引控制的基本需求,提出一种基于双浮点 DSP+FPGA混合架构的先进牵引控制系统模式,对系统的软、硬件架构和核心控制器的任务处理方式进行设计,解决了上述瓶颈问题,并将其应用于实际城轨电力牵引系统。
2 城轨列车电力牵引系统及其控制
2.1 电力牵引系统原理简介
不同车型城轨列车电力牵引系统除了在驱动方式(轴控、架控或车控方式)、驱动功率上依据实际需要有较大差异外,系统的组成原理类似,都是通过控制电压型逆变器将直流电转换为可变频变压的交流电来驱动牵引电机,进而达到控制列车前进、停止的目的,其实施原理如图1所示。

图1 城轨列车电力牵引系统原理框图Fig.1 Schematic block diagram of vehicle traction system
根据图1,可以简单地将电力牵引系统分成主电路、牵引控制系统和电源三部分,相互之间通过传感器(包括电压、电流、温度、流量、速度等)、驱动单元等进行连接,同时,为了与外部进行实时信息交互,还需要通过网络接口与车辆网络以及监控系统连接。牵引控制系统相当于整个电力牵引系统的“大脑”,直接关系列车运行的功能、性能以及可靠性,也是与其他系统进行对话的窗口。
2.2 电力牵引控制方法
城轨列车电力牵引系统的控制功能可以分为车辆控制及电机控制两部分,如图2所示。

图2 牵引控制系统功能框图Fig.2 Function block diagram of traction control system
车辆控制根据车速和司机指令得到运行方向和牵引、制动、惰行以及限速、洗车、倒行等状态,并通过牵引制动特性曲线得到初步的给定牵引力;然后考虑不同工况以及冲动、黏着等因素,得到最终的给定牵引力作为牵引电机的给定扭矩,并由电机控制达到期望的运行效果。电机控制采用矢量控制模式:检测直流电压、电机电流、电机转速以及重构电机电压信号,通过坐标变换、转矩和励磁的解耦控制算法以及磁链估测算法得到电机转子磁通及位置角,进而得到给定的定子电压幅值、频率和位置,最后经 PWM调制算法得到驱动脉冲,驱动IGBT控制电机运行[8]。
3 牵引控制系统需求分析
由于车辆控制以及电机控制中的坐标变换、位置计算等模块的算法相对简单,受控制系统的限制较小;而对于运算要求较高的信号调理、磁链估测以及对实时性要求很高的多模式 PWM调制、驱动保护等模块,则直接受限于控制系统的架构模式。根据城轨列车电力牵引系统的功能和性能要求,需要对牵引控制系统进行需求分析,为后续系统架构提供基础。
3.1 核心控制需求
牵引控制尤其是电机控制部分涉及大量的乘、除、积分、微分等算法,要求处理器具有足够的内存和处理能力。多家公司提供的DSP,如TI公司2000系列、6000系列,AD公司TigerSHARC、ADSP—21xx系列等一般都能够完成要求的复杂算法;在定点和浮点的选择上,虽然定点系列处理器能够通过定标运算来达到所需的控制精度,但由于浮点系列具有专门的浮点运算单元,不需要时刻关注定标的一致性,减小了编程的难度,而且在复杂算法的处理速度上也要比定点处理器快2~3倍[9]。
牵引控制必须基于能够获知参与控制所需的外部模拟和数字信号,由于DSP顺序执行的语言结构以及有限的外部接口资源,并不适用于需要同时处理高精度时间运算以及面向任务运算的系统,如存储器接口、信号接口等;而 FPGA灵活的 IO配置及硬件并行处理功能,正好填补了这一不足,而且FPGA可以完成DSP能完成的所有功能,甚至在实时性、灵活性可能还要强大[10,11],但其当前相对复杂的编程及调试方式也增加了开发的难度。
所以,浮点DSP+FPGA仍为当前的主流架构模式,被大多数城轨列车制造商采用,论文的牵引控制系统也采用这一架构。
3.2 存储需求
牵引控制系统要求实现程序、过程数据、运行故障数据的存储。如同一台普通电脑一样,对于实时性要求高的执行程序和临时数据,需要内存单元,一般采用随机存储器RAM;而对于所需空间大,实时性要求不是很高的程序或大量数据,则需要硬盘,一般采用 NorFlash和NandFlash。同时,根据所执行任务的分配,每个处理器都应该能够访问系统中的部分或全部存储空间。
3.3 模拟及数字量处理需求
牵引控制系统与主电路的交互通过系统的模拟、数字接口来体现。一方面,牵引控制系统通过A-D接口实时采集牵引系统的电压、电流、温度、速度、流量等模拟量,通过 DI接口采集一些外部或内部的数字量,然后根据控制的需要进行信号调理如滤波;另一方面,将通过D-A接口将内部模拟状态量进行输出,通过DO接口进行数字状态量和控制量的输出。
一般来说,离散数字量的处理相对容易,而由于要求更高的实时性,连续的模拟量则要求能够实现对所有重要通道的同步采样,采样率一般不小于100ks/s[12]甚至能够过采样;为了保证高精度控制,要有足够的分辨率,一般采用至少12位的A-D转换器。
3.4 功率驱动需求
功率驱动是牵引控制系统控制 IGBT开关管的执行机构,包括驱动脉冲产生、驱动功率放大、检测反馈和保护功能。
3.5 网络通信需求
通过网络通信接口,牵引控制系统一方面与车辆总线连接,实现与列车其他设备的数据交互;另一方面,考虑系统本地监控或故障诊断的需要,要求提供与计算机的通信接口。由于不同车型有不同的通信模式,所以牵引控制系统必须能够提供CAN、以太网、串口、MVB等网络接口。
4 双DSP+FPGA架构的牵引控制系统
根据前面的分析,牵引控制系统采用双DSP+FPGA的架构方式,并配备丰富的外围接口,以实现车辆控制、电机控制以及网络通信。下面将对软硬件架构和任务处理进行设计实现。
4.1 控制系统硬件架构
图3给出了牵引控制系统的硬件架构示意图及实物,包括控制DSP、FPGA、通信DSP三部分,相互之间通过地址/数据总线进行数据交换和共享;其中 DSP采用 TI公司的 Delfino系列TMS320F28335, FPGA采用Altera公司的Cyclone II系列的EP2C8。

图3 牵引控制系统硬件架构和样机示意图及实物Fig.3 Hardware block diagram & prototype of traction control system
控制 DSP主要完成车辆控制逻辑和电机核心控制算法,包括转子磁链估测、电流控制、PWM调制角度计算等。FPGA通过丰富的外围接口(包括功率驱动、模拟接口、数字接口等)获取系统运行数据,并行完成模拟和数字信号处理、PWM 脉冲调制生成、保护逻辑等功能,并通过地址/数据总线接口实现与 DSP的数据交互。通信DSP主要完成各个通信协议及数据存储、故障诊断功能。
4.2 控制系统软件架构
基于双 DSP+FPGA架构平台的牵引控制系统能够完成高性能车辆控制、电机控制以及网络通信,不同的编程语言和编程环境被应用于系统软件编程,并形成图4所示的软件架构。
牵引控制软件架构需要把握系统任务和硬件能力:需要高速、并行处理的逻辑和算法都由 FPGA完成,相对低速、较复杂的算法由DSP完成。以处理周期作为参考点,可将牵引控制系统软件分为图4所示的三个层次。
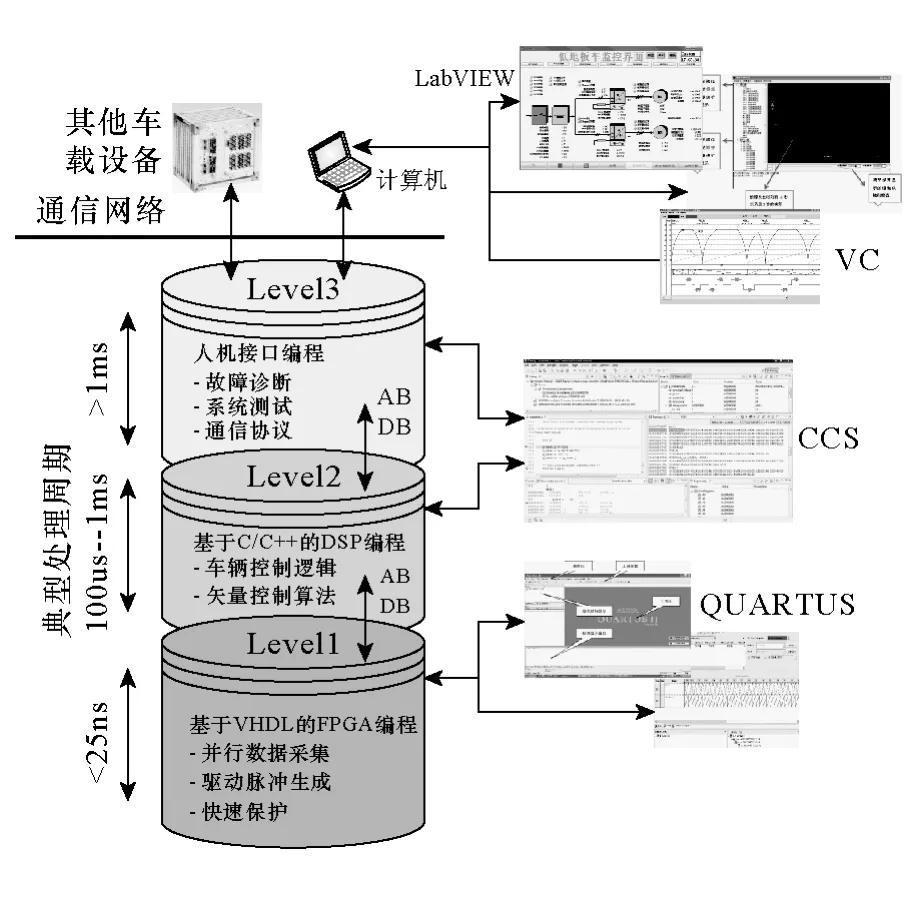
图4 牵引控制系统软件架构示意图Fig.4 Software block diagram of traction control system
4.2.1 Level 1:快速接口控制
该层次主要由 FPGA完成对实时性要求很高(一般小于25ns的处理周期)的任务,包括并行的模拟量采集和数字量采集处理、驱动脉冲的生成算法和保护逻辑;同时,FPGA还要通过地址/数据总线实现与其他处理器的快速数据交互。FPGA算法基于Altera提供的QUARTUS软件和VHDL编程语言实现。
4.2.2 Level 2:快速浮点控制算法
通过主控 DSP完成处理周期在 100us至 1ms间的车辆控制逻辑和快速电机矢量控制算法,包括黏着控制、转子磁链估测、转矩和励磁调节运算、PWM 调制开关角运算、坐标变换以及系统的保护动作等,并通过地址/数据总线与FPGA进行通信。采用基于TI公司提供的CCS(Code Composer Studio)软件平台的C/C++编程语言实现。
4.2.3 Level 3:慢速网络监控
第3层实际包括两部分功能:基于DSP的底层网络处理及基于计算机平台的顶层用户接口处理。两部分共同完成系统的监控、通信及故障诊断任务,实时性上要求相对较低,一般仅要求大于1ms的处理周期。DSP的编程方式与主控DSP一样,而顶层编程则更多采用界面语言如 LabVIEW、VC,以便于形成直观的图形对话界面。
4.3 DSP任务处理
通过在 CCS界面下的 C/C++编程,两片 DSP分别实现网络通信及控制功能,各功能的软件流程如图5所示。

图5 DSP控制软件流程图Fig.5 DSP control flowcharts
由于2000系列的DSP不能像操作系统一样实现多线程并行处理,对于通信DSP,使用最简单的单周期中断模式,为了确保故障数据的完备性,需要存储故障数据的故障触发模式优先级最高,其次是用户的数据下载,通信功能在里面的优先级较低,因为在硬线控制模式中,网络中断并不能对牵引控制产生足够大的影响。用于控制的DSP承担的任务要复杂的多,呈现多任务多速率状态,几个主要任务的优先级和处理周期见下表(按照150MHz时钟频率计算),总体上遵循故障优先、高速任务优先的原则。所以,简单的单中断模式并不能高性能完成上述任务,解决的方法是首先通过 DSP自带的DSP/BIOS实时操作系统进行任务优先级管理,在同一优先级而速率不同的任务之间,通过处理周期进行顺次调度。
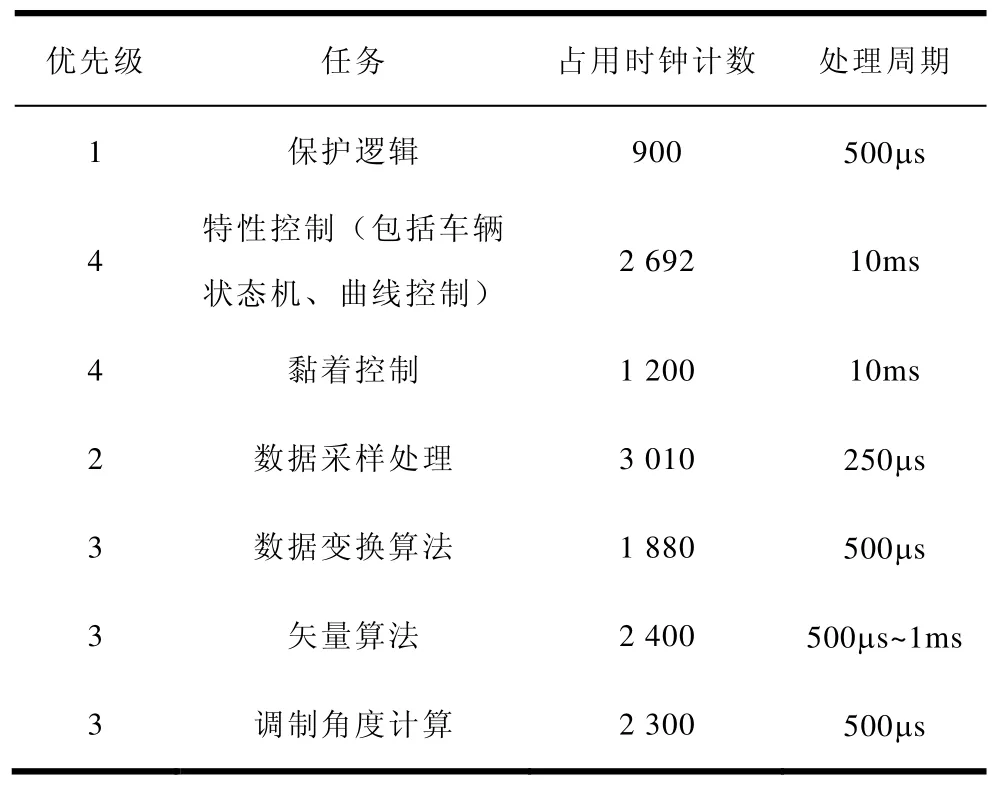
表 主控DSP任务优先级和处理周期Tab.Priority and period of main control DSP tasks
4.4 FPGA任务模块
需要FPGA并行处理的任务如图6所示,整个系统采用一个全局复位信号和时钟信号,下面对各个模块进行说明。

图6 FPGA任务处理示意图Fig.6 Block diagram of FPGA tasks
4.4.1 总线通信模块
通过该模块实现FPGA与DSP间的数据交互,而且利用FPGA内部的RAM空间作缓存,避免了额外的外部RAM接口。为了解决两片DSP或者DSP与 FPGA内部同时对同一地址进行读写引起的冲突,设置了读写仲裁器;最高通信速率可达75M位。
4.4.2 脉冲生成模块
与控制DSP交互获取调制模式、调制角度以及同一桥臂的死区时间:通过与内部增减计数器的比较或者强制的电平控制,生成需要的混合驱动脉冲;通过死区控制防止同桥臂的短路直通;同时,在系统故障状态下,迅速封锁所有输出脉冲。
4.4.3 电机速度采样模块
由于单纯测频率(M法)或测周期(T法)无法满足电机全速度范围的测量精度需求,采用低速T法和高速M法相结合的M/T测速算法;同时,需要采用方向状态机获取速度方向,并实时监控输入脉冲是否存在丢失的情形。最终输送到 RAM缓存中的是int16类型的实际速度。
4.4.4 保护模块
FPGA主要进行快速保护控制,包括根据驱动板故障反馈信号进行的驱动保护和根据电压、电流等进行的电量保护,综合后的保护信号一方面送给其他相关模块如输出控制、脉冲生成等进行保护动作,另一方面通过硬线送给控制DSP进行保护动作和送给通信DSP触发故障数据存储。由于FPGA的保护还必须通过其他模块的动作才能被执行,对于最严重的故障如短路,FPGA的保护速度还不够快,必须有底层驱动板最快最直接的保护功能。
4.4.5 模拟及数字处理模块
该模块主要实现并行采集处理的功能。
5 实验结果
受国家“十一五”科技支撑重点项目的支持,将该牵引控制系统架构应用于地铁A型车及我国首列 100%低地板车,已经完成所有现场运行实验,图7给出了轻轨车的正线运行波形,运行状态良好,充分验证了所采用系统架构的可行性和可靠性。
6 结论
本文分析了适用于城轨列车电力牵引系统的控制系统软硬件需求,基于现有处理器在数字信号处理和并行处理方面的性能优势,提出了采用双浮点DSP+FPGA的系统架构模式,对硬件、软件的实现方法进行了实用化设计,使其适用于实际的地铁或轻轨列车电力牵引系统,实现了高质量的列车控制和电机控制,以及完善的网络监控和故障诊断。
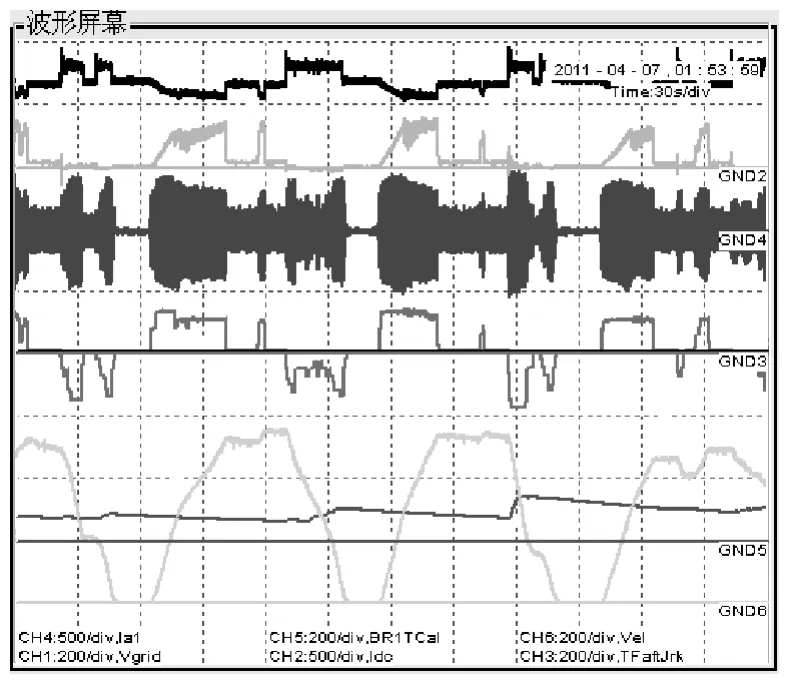
图7 列车正线运行的牵引系统相关波形Fig.7 Waveforms of traction system on the operation line
[1] 2010~2015年中国城市轨道交通及设备市场调查及投资咨询报告[R].http: //www.askci.com/print172041.html.
[2] Mukherjee S,Poddar G.Fast control of filter for sensorless vector control SQIM drive with sinusoidal motor voltage[J].IEEE Transactions on Industrial Electronics,2007,54(5): 2435-2442.
[3] Parkhi V,Shilaskar S,Tirmare M,et al.FPGA implementation of PWM control technique for three phase induction motor drive[C].First International Conference on Emerging Trends in Engineering and Technology,2008,7: 996-1001.
[4] Bonnet F,Vidal P E,Pietrzak David M.Dual direct torque control of doubly fed induction machine[J].IEEE Transactions on Industrial Electronics,2007,54(5): 2482-2490.
[5] 孙大南,李哲峰,王少林,等.基于 DSP-FPGA 全数字控制的矢量控制系统[J].电力电子技术,2008,42(11): 26-27.Sun Danan,Li Zhefeng,Wang Shaolin,et al.Vector control system based on DSP-FPGA full-digital control[J].Power Electronics,2008,42(11): 26-27.
[6] 谢维达.列车微机控制系统发展综述[J].电力机车与城轨车辆,2007,30(6): 1-4.Xie Weida.Survey of vehicle computer control system[J].Electric Locomotives & Mass TransitVehicles,2007,30(6): 1-4.
[7] 潘辛怡.长春轻轨车辆的牵引变流器[J].城市轨道交通研究,2009(5): 65-67.Pan Xinyi.Analysis of traction converter of Changchun city light rail vehicle[J].Urban Mass Transit,2009(5): 65-67.
[8] 孙大南,刘志刚,刁利军,等.牵引电机矢量控制转子磁场准确定向实时校正策略[J].电工技术学报,2011,26(9): 116-123.Sun Danan,Liu Zhigang,Diao Lijun,et al.Accurate rotor flux orientation real-time correction strategy for vector control of traction motors[J].Transactions of China Electrotechnical Society,2011,26(9): 116-123.
[9] TI white paper.Enabling Greener Embedded Control Systems with Floating-point DSCs.WP-01084-1.0.2008.
[10] Altera white paper.FPGAs enable energy-efficient motor control in next-generation smart home appliances.WP-01084-1.0.2008.
[11] Monmasson E,Cirstea M.FPGA design methodology for industrial control systems-a review[J].IEEE Transactions on Industrial Electronics,2007,54(4):1824-1842.
[12] Claus Ulrich Karipidis.A versatile DSP/FPGA structure optimized for rapid prototyping and digital real-time simulation of power electronic and electrical drive systems[D].Aachen: Aachen University of Technology,2001.
