长江上游控制河段船舶识别及通行指挥技术探讨
2014-06-19曾科伟刘作飞蒋明贵闻光华
曾科伟,刘作飞,蒋明贵,闻光华
(长江重庆航道局,重庆401147)
长江上游控制河段船舶识别及通行指挥技术探讨
曾科伟,刘作飞,蒋明贵,闻光华
(长江重庆航道局,重庆401147)
摘要:通过对目前雷达、AIS、CCTV技术的介绍,分析了各自的优缺点,针对长江上游控制河段可视距离较短,信号人员监控和指挥船舶能力较弱的特点,提出了采用多传感器处理技术,将雷达、AIS、CCTV系统产生的多个目标进行融合,可以充分发挥各系统的优势,起到在控制河段辅助通行指挥的作用。
关键词:控制河段;船舶识别;多传感器
由于长江上游航道条件不良,航道宽度、弯曲程度或流态不能满足轮船安全对驶的要求,轮船只能单向通过,故设置信号台实行通行指挥[1]。自20世纪初以来,航道部门先后设置了狐滩、青石洞、广阳坝等多座信号台,采用人工控制的方式指挥船舶上下通行,为保障船舶航行安全发挥了极其重要的作用,成为长江行轮的“保护神”。
近年来,随着全球低碳经济发展的趋势,内河航运飞速发展,船舶标准化、大型化、高速化进程大幅提升,传统的视觉航标已不能完全满足船舶助航需求,信号台以人工观测、经验判断为主的指挥方式更是难以适应船舶高效通行的需求,通行指挥系统亟需新方法、新技术、新装备提升其效能。
1 船舶监控技术现状
目前在水运行业中为实现船舶动态监管常采用的几个系统分别为[2-3]:
(1)雷达监控系统:采用雷达技术对船舶的航行状况进行高效、准确地监管,是我国港口船舶管理中主要使用的一种技术手段。雷达监控系统通过雷达扫描主动对雷达所覆盖区域的船舶位置和航行状况进行侦测。它的优点是可以实现覆盖水域船舶的主动侦测,获取船舶的位置、航速和航向信息,且刷新速度快;缺点是无法获取船舶的静态信息,如船名、呼号,且雷达信号存在盲区。
(2)船舶自动识别系统(AIS系统):是目前最为常用的船舶动态监管手段,由岸基(基站)设施和船载设备共同组成,是一种新型的集网络技术、现代通讯技术、计算机技术、电子信息显示技术为一体的数字助航系统和设备。AIS系统通过安装在船上的AIS船台发出船舶的相关位置、航速、航向等动态信息和船名、呼号等船舶静态信息,由岸基AIS台站接收船舶的AIS信息,实现对AIS船舶的跟踪。它的优点是全国沿海及长江已经全部覆盖了AIS岸台,AIS船舶发出的信息较全,包含了动态信息和静态信息,且不需人工标示,覆盖范围广。缺点是被动接收信号,且只有安装有AIS船台的船舶才能被监控,且受通信网络和是否开机的影响。
(3)视频监控系统(CCTV系统):是为加强水上交通安全管理,提高水上现场监管和应急搜救指挥能力,建立以视频摄录为信息采集手段,计算机为数据处理终端,依托船舶管理部门内部信息网络为主要传输通道的数字电视监控系统。CCTV系统是一个直观的现场监管手段,可以通过CCTV系统直接了解现场船舶的航行状况和船舶类型等信息。它的优点是可以对现场情况一目了然,缺点是监控距离比较短,而且除了有可能拍摄到船名以外,无法获取准确的船舶动静态信息。
以上系统相互独立,各自在水运相关行业的船舶监控中发挥着重要作用。但各个系统在独立运行的过程中由于其固有的缺点已经无法满足船舶管理部门对船舶动态监管越来越高的要求,多种船舶动态监管手段的整合已势在必行。
基于上述情况,本文主要研究以长江电子航道图、雷达、AIS、CCTV等系统为基础,综合各系统的优势,采用多传感器综合处理技术将雷达、AIS和CCTV目标融合显示于电子航道图上,实现对船位信息的主动探测和动态掌握。同时CCTV系统通过夜视、红外热成像技术,提高视频监控效果,实现对控制河段船舶运行状态的全面掌控。通过对多种数据源的综合数据挖掘,统计分析出信号揭示指令作为信号员现场辅助决策依据;必要时,航道指挥中心可依据通行控制预案,结合各种动、静态数据进行航道远程指挥,进一步提高通行控制效率和信号指挥水平。
2 多传感器综合处理技术
上述提到的雷达、AIS、CCTV技术都是可以实现目标录取跟踪的信号源,每个传感器(雷达、AIS、CCTV)提供一个目标的运动模型,多传感器处理系统对多个运动模型进行对比匹配后,建立一个统一运动轨迹的过程称为多传感器目标融合[4-5]。目标融合算法将基于3套子系统所提供目标的如下参数进行对比:
(1)船舶经纬度位置;(2)航向;(3)航速;(4)船舶加速度;(5)船舶转向率。
当一艘船舶在多个传感系统中都有实时数据,系统操作人员可以独立显示其雷达原始视频、雷达跟踪目标、AIS目标、CCTV目标,也可以选择融合为同一目标。通过多传感器目标融合,船舶可以在CCTV系统的视频画面中实时显示船名及其他相关信息。
3 布设原则与航行规则
在对控制河段的通行指挥系统设计布局时主要考虑了三种原则:第一,以雷达系统和AIS系统结合作为主要监管手段,尽可能选择在上指挥断面的预告台架设,重点保证上指挥断面和进入槽口水域前的监控覆盖,尽可能覆盖整个控制河段水域;第二,视频监控系统作为辅助监控手段主要选择在控制台进行建设,重点解决控制河段内槽口水域船舶违章进出槽口的视频取证;第三,充分利用现有信号台的基础资源,按照重点加强、局部调整的原则分层次进行布局,相邻控制河段尽量做到信息的共享和综合利用。
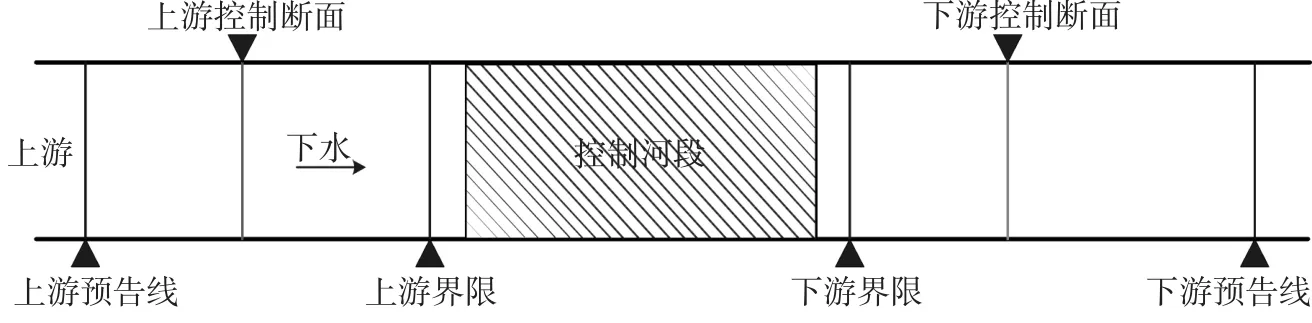
图1 控制河段示意图Fig.1Sketch of controlled river
如图1所示,阴影部分为控制河段,在电子航道图系统中分别设置上游预告线、上游控制断面、上游界限、控制河段、下游界限,下游控制断面、下游预告线7个要素,当船舶经过这7个要素时,系统可以自动识别。
控制河段的航行规则:
(1)上游下行船舶到达上游指挥断面,通过高频信号通知信号台,请求放行。如果控制河段没有船舶上行,原则上予以放行。上行船舶不得进入控制河段,准备进入控制河段的船舶需在下游指挥断面停靠等待。
(2)下游上行船舶到达下指挥断面,通过高频信号通知信号台,请求放行。如果下行没有船舶进入,原则上予以放行。准备进入上指挥断面的下行船舶在进入控制河段之前调头等待。
(3)控制河段禁止对驶、并行、拖尾航行和调头。
(4)控制河段禁止超吃水船舶航行。
(5)50 m以下船舶和800 HP以下船舶不受控制。
(6)违规进入控制河段为严重违章。
4 控制河段船舶动态监控方式
控制河段船舶动态监控通过AIS、雷达、视频等监控方式,实时获取控制河段通行船舶动态信息,并基于GIS平台展现给信号员,为信号员科学地进行通行控制提供科学支撑,船舶动态监控主要实现以下功能:
(1)当有船舶进入上下指挥断面时,系统自动提示报警,并根据通行指挥原则揭示信号;
(2)对尚未进入上指挥断面的船舶误报船位进行监管;
(3)结合电子航道图,实现控制河段通行指挥多级监管。
信号员可根据控制河段具体情况预设规则,当船舶动态监控模块监测到船舶驶入预定范围(上下指挥断面)时即自动向信号员发出预警提示,并根据预设规则自动生成信号揭示指令,信号员可参考信号揭示指令进行信号揭示操作。
系统实现对尚未进入上指挥断面的船舶误报船位的行为进行重点监管,通过AIS和视频监控,可以跟踪目标船舶的位置和动态,一定程度上减少因船舶误报船位导致通行信号揭示不准确的情况发生。
信号员结合通行信号提示,根据现场实际情况揭示通行信号,系统能够统计出信号辅助提示的准确率,并能够通过算法的不断调整来提高信号辅助揭示的准确率。
5 试点工程情况
根据以上的系统研究,选择铜锣峡控制河段莲花背信号台进行试点工程建设,该控制河段是川江河段最具有代表典型意义的,汇集了川江航道弯、窄、浅、险特征;汛期,水流湍急、流态紊乱,水位陡涨陡退频繁,变化较大;枯水期航道弯曲狭窄、滩险密布、雾大瘴浓,航行条件比较恶劣[6]。且该河段离市区最近,选择该处具有很好的示范推广效应。
铜锣峡控制河段通行指挥系统控制区域情况如图2所示。

图2 莲花背信号台控制区域Fig.2Controlled region by Lianhuabei Signal Station
目前该信号台仍停留在人工瞭望、VHF电话联系等方式获取上下水船舶船位信息,然后凭借信号员业务水平和经验揭示通行信号。当船舶到达鸣笛标时,通过VHF联系信号台,信号员通过望远镜确认船舶到达,然后根据航道情况揭示信号,未被允许通行的船舶在鸣笛标和界限标之间稳船,等待信号员进一步指示。采用此种方式,通行指挥受信号员业务能力、心情、心理状态等多因素影响,且信号员难以主动掌握船舶准确位置,尤其是在天气状况不良的状况下(如大雾),容易被上水船舶虚报位置所欺瞒,容易影响信号揭示准确性,不能有效保证上、下水船舶顺利通行,易引发船舶交通安全事故。
通过莲花背信号台及其指挥的控制河段进行试点,得出如下结论:
(1)安置雷达系统,可识别船的间隔为3~5 m,大大缩短了船舶识别距离;
(2)雷达的扫描频率为2.8 s,可以准确地跟踪行进中的船舶;
(3)通过雷达目标录取跟踪技术,大大提高了雷达的识别精度;
(4)根据观察,莲花背水域下水船速一般在10~20 km/h,上水船在5~6 km/h。下水时每个信号间隔船移动距离为80~160 m,如果有信号丢失,丢失1个信号,则船的移动距离为160~320 m,以此类推;
(5)内河船舶基本上安装的为AIS CLASS B的船台,该船台在长江狭窄水道和急弯水道信号丢失严重,因此AIS信号不宜作为控制河段的船舶信号源,但可以为雷达融合提供船舶数据;
(6)通过在控制河段的信号台、预告台建设雷达、AIS和CCTV联动监控系统,利用多传感器综合处理融合技术,可以发挥各个系统优势,弥补不足,很好地起到船舶识别和辅助通行指挥的作用。
参考文献:
[1]JTJ287-200,内河航道维护技术规范[S].
[2]甘星.AIS与雷达信息融合在VTS中应用的研究[D].大连:大连海事大学,2003.
[3]罗素云.AIS与雷达目标位置数据融合方法的研究[D].武汉:武汉理工大学,2003.
[4]黄娜.基于雷达和红外传感器的多传感器数据融合研究[D].吉林:吉林大学,2007.
[5]王刚,张志禹.多传感器数据融合的研究现状[J].电测与仪表,2006(2):1-4. WANG G,ZHANG Z Y.The Current Status of the Multi⁃sensor Data Fusion[J].Electrical Measurement&Instrumentation,2006(2):1-4.
[6]陈晓云,罗宏,杨胜发,等.三峡工程库尾航道演变规律研究[R].武汉:长江航道局,2010.
Biography:ZENG Ke⁃wei(1979-),male,engineer.
中图分类号:U 661.73
文献标识码:A
文章编号:1005-8443(2014)05-0563-04
收稿日期:2013-12-06;修回日期:2014-01-10
基金项目:交通运输部科技项目(基金编号2011328350 1490)
作者简介:曾科伟(1979-),男,重庆市人,工程师,主要从事航道与航标方面的工作。
Technical discussion on ship identification and ship command in controlled river in upper Yangtze River
ZENG Ke⁃wei,LIU Zuo⁃fei,JIANG Ming⁃gui,WEN Guang⁃hua
(Changjiang Chongqing Waterway Bureau,Chongqing 401147,China)
Abstract:According to the introduction of radar,AIS and CCTV,the advantages and disadvantages of each technical system were analyzed.Aiming at the short visual range in controlled river in upper Yangtze River and the weak capacity of monitoring and command,a new technology using the multi⁃sensor to fuse the multiple objects gen⁃erated by radar,AIS and CCTV system was proposed.It can make good use of each system,and it also plays an im⁃portant part in ship command in controlled river.
Key words:controlled river;ship identification;multi⁃sensor