达芬奇机器人手术与胸腔镜辅助小切口手术对肺手术患者创伤对比分析
2014-06-14张大坤许世广丁仁泉王述民
张大坤,许世广,丁仁泉,王述民
1.辽宁医学院,辽宁锦州 121000;2.沈阳军区总医院,辽宁沈阳110016
21世纪,外科在微创理念的引导下,各种腔镜技术快速发展,并以其创伤小、切口隐蔽、术后恢复快等特点,在外科各专业领域广泛应用。在胸外科中胸腔镜辅助小切口手术为最常用的手术方式。近年来,由于工业自动化技术、计算机图像技术以及控制技术的高速发展,手术机器人应运而生,达芬奇机器人手术以其直观、放大、清晰的视野,精准、灵活、无震颤的操作,使精确微创手术成为可能,成为微创外科最具代表性的技术。近年来,在国内外各个学科均获得广泛的应用。本研究通过对比胸腔镜辅助小切口手术与达芬奇机器人手术术中及术后的创伤指标,比较两种术式对患者的微创程度[1-3]。报告如下。
1 资料与方法
1.1 临床资料 选择2012年7月-2013年5月88例胸外科肺手术患者,其中达芬奇机器人手术40例,男女比例为24:16,平均年龄(56±2)岁;胸腔镜辅助小切口手术48例,男女比例为25:23,平均年龄(59±1)岁。两组患者根据家庭经济条件和疾病情况选用不同的手术方式,其中机器人手术组患者家庭经济条件较好,病情较轻,平均学历略高。两组患者术后均常规给予枸橼酸舒芬太尼患者自控止痛泵,药物剂量为1.0 μg/kg。经过统计分析,两组患者在性别、年龄、病情、文化程度等方面差异无统计学意义(P>0.05)。见表1。
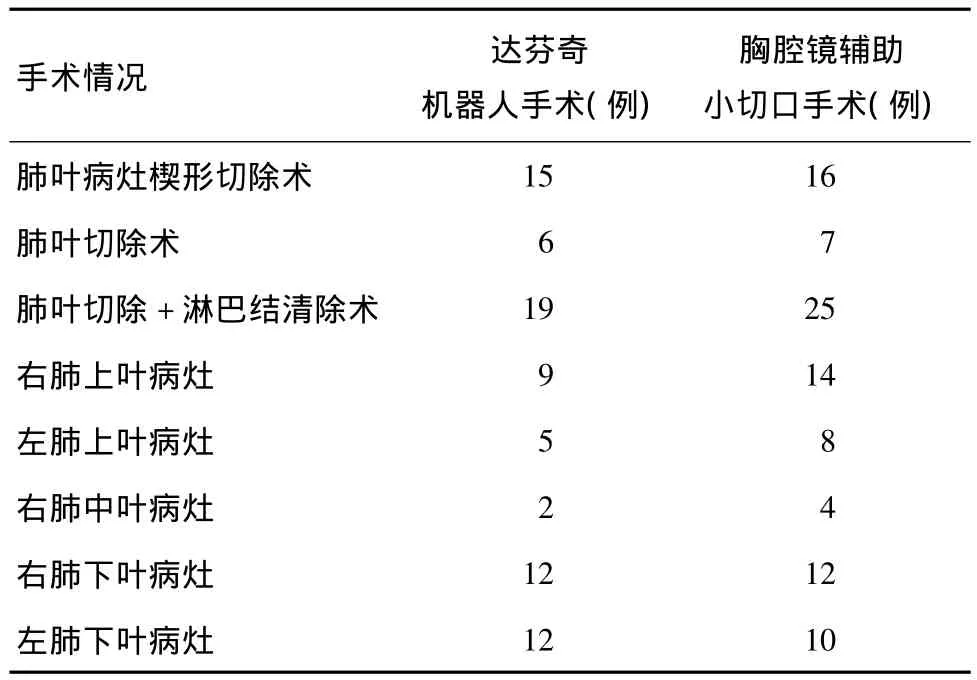
表1 两组患者手术资料比较
1.2 手术方法 达芬奇机器人手术采用三臂法,即一个镜头臂,两个操作臂,使用机器人专用戳卡,戳卡位置根据病变位置及范围确定,同时另作一个3~4 cm的辅助操作口,使用切口保护套撑开保护切口,不使用肋骨撑开器,术后留置1根或2根胸腔引流管[4]。胸腔镜辅助小切口手术采用腋下切口,手术切口长度范围为7~12 cm,同时于第7肋间切开1.5 cm的小口置入戳卡,作为胸腔镜入口,手术过程中需使用肋骨撑开器,部分患者需断肋骨或有肋骨裂伤,术毕关胸使用可吸收缝线跨肋缝合,术后留置1根或2根胸腔引流管[5]。
1.3 McGill疼痛调查问卷 McGill疼痛调查问卷(McGill Pain Questionnaire,MPQ)首先由 Melzack 在1975年制作并发展起来,是第一种具有疼痛自评特点的调查用表,现在仍然得到广泛应用[6]。MPQ用来评估疼痛过程中具有多方向性,而且已被证实是一种可靠的、有效的、有一致性的测量手段。见表2。
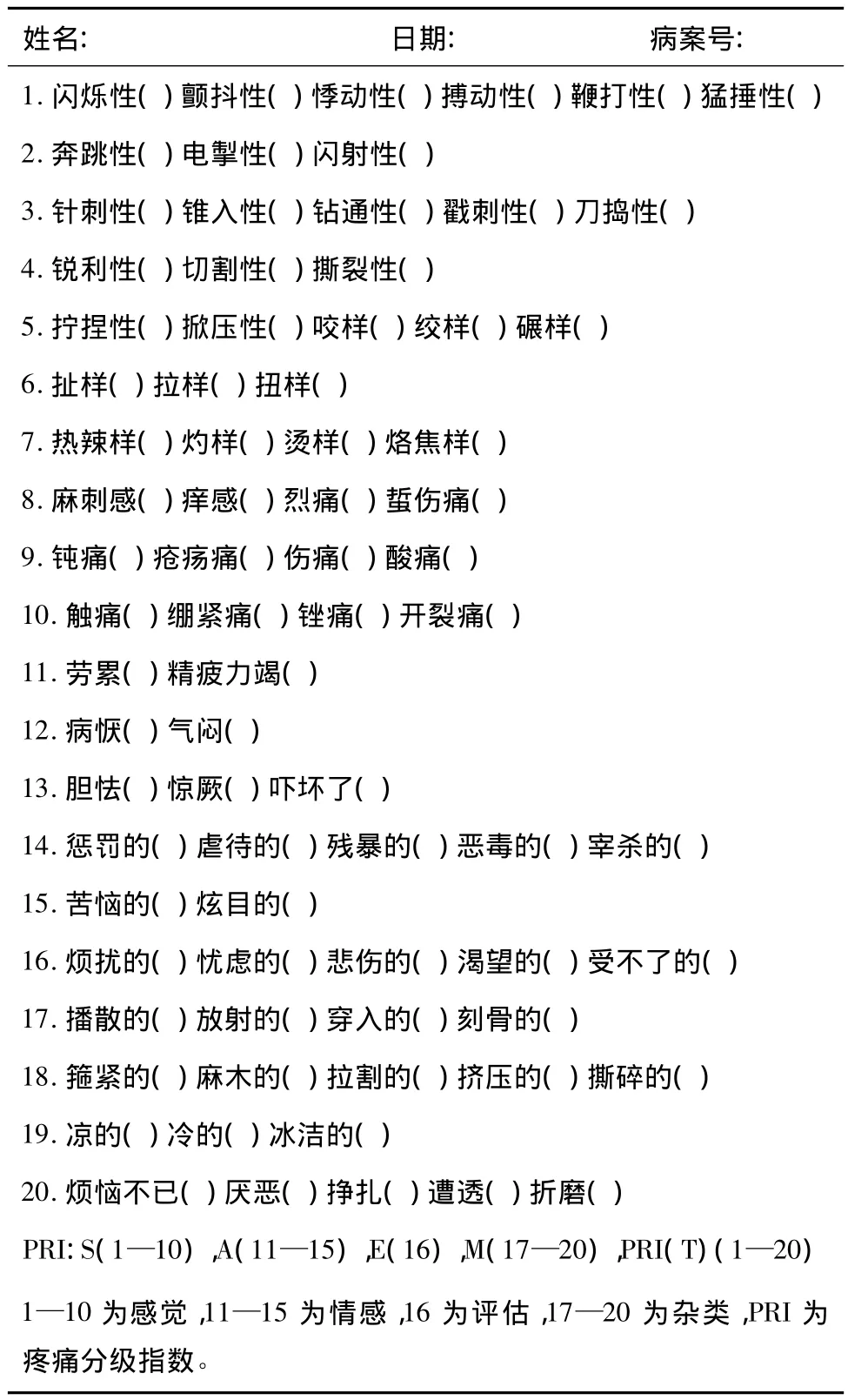
表2 McGill疼痛调查表(MPQ)[7]
1.4 调查指标 (1)术中出血量。(2)术后第1天通过MPQ疼痛调查表(表2)调查患者疼痛强度,评估患者术后疼痛强度。根据被测者所选出词在组中的位置可以得出一个比例数值(1组选择“闪烁性”为1/6,3组选择“钻通性”为3/5),亚小组内相加所得数值之和为亚小组总分,其组内平均值为亚小组PRI,亚小组PRI相加后的平均值即为总评级疼痛分级指数(PRI)。(3)术后记录每天胸腔引流液的量,计算出每日胸腔引流液量之和。(4)24 h总引流量少于100 ml,且颜色转黄时拔除引流管,统计术后胸腔引流管的留置天数。
1.5 统计学分析 所有数据采用SPSS 18.0软件进行统计学处理,两组统计数据均为计量资料,结果以均数±标准差(±s)表示,以t检验比较两组均数,P<0.05为差异有统计学意义。
2 结果
2.1 基本情况 两组患者在性别、年龄、病情、文化程度等方面差异无统计学意义。
2.2 出血量 术中机器人手术组出血量为(49±14)ml,胸腔镜辅助小切口手术组出血量为(197±34)ml,两组患者术中出血量比较,差异有统计学意义,P <0.05。
2.3 术后疼痛 两组患者术后均有一定程度的疼痛,达芬奇机器人手术组疼痛总评级指数PRI平均为0.152 3±0.022 9,胸腔镜辅助小切口手术组疼痛总评级指数 PRI平均为 0.257 1±0.034 5,两组患者术后疼痛比较,差异有统计学意义,P<0.05。
2.4 术后胸腔引流量 两组患者术后均需留置胸腔引流管,并统计引流胸腔积液,达芬奇机器人手术组术后总胸腔引流量为(874±139)ml,留置时间为(6±1)d;胸腔镜辅助小切口手术组术后总胸腔引流量为(1695±201)ml,留置时间为(8±1)d,两组患者术后留置胸腔引流管的天数和积液量比较,差异有统计学意义,P<0.05。见表3。
表3 两组患者临床资料结果分析(±s)
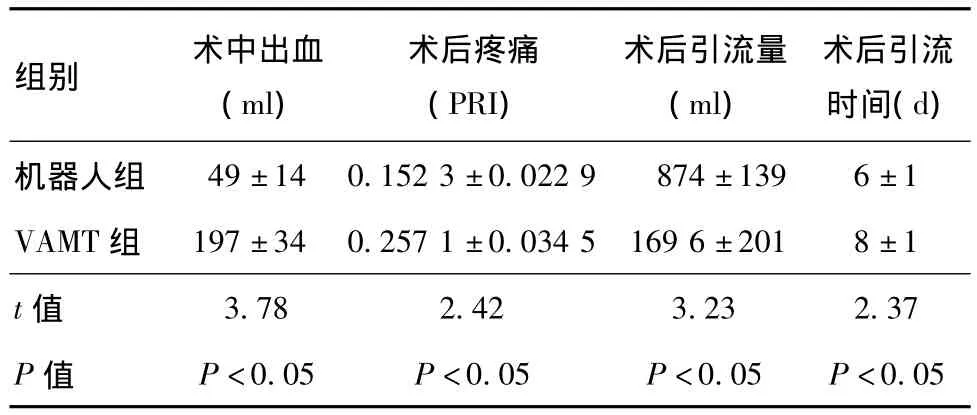
表3 两组患者临床资料结果分析(±s)
组别 术中出血(ml)术后疼痛(PRI)术后引流量(ml)术后引流时间(d)49±14 0.152 3±0.022 9 874±139 6±1 VAMT组 197±34 0.257 1±0.034 5 169 6±201 8±1 t值机器人组3.78 2.42 3.23 2.37 P 值 P <0.05 P <0.05 P <0.05 P<0.05
3 讨论
外科手术为患者治疗疾病的基本方法,虽然这种治疗方法有利于患者疾病的康复,但也会对患者的机体造成一定的损伤,从而引起术中出血、术后疼痛等[8]。而对患者进行开胸手术之后,出血和疼痛不可避免,而且几乎所有患者术后要留置胸腔引流管,引流积液[9]。胸部手术中不同的手术方式给患者造成创伤不同,评估手术对患者的创伤程度尚无明确的评估方式。术中出血、术后疼痛可基本反映手术对患者机体组织的创伤。开胸手术后引流的胸腔积液是由于手术对患者胸膜和肺组织的损伤引起的慢性渗出,因此,术后胸腔积液的量和引流时间也可反映手术对患者的损伤程度。
MPQ具有实用性、有效性和可靠性的优点[10],不仅能顾及疼痛体验的多个方面,而且对疼痛的治疗效果和不同诊断亦十分敏感,所以是目前较为合理的测痛手段[11-13]。MPQ从感觉、情感、评价和其他相关的4个方面因素以及现时疼痛强度(PPI)进行较全面的评价,共含有4类20组疼痛描述词,每组词按疼痛的程度递增的顺序排列,其中1~10组为感觉类,11~15组为情感类,16组为评价类,16~20组为其他相关类[14]。被测者在每一组词中选一个与自己痛觉程度相同的词。MPQ评分包括疼痛分级指数(PRI)之和和目前疼痛强度(PPI)。本研究使用MPQ调查表评估患者术后的疼痛程度,仅计算疼痛分级指数之和,即总评级疼痛分级指数(PRI)。
胸外科手术中,大多采用经前外侧切口、后外侧切口等肋间隙进胸的斜切口,术后疼痛剧烈,这是因为斜切口需切断发达的胸壁肌肉,不可避免地会损伤肋间神经及其分支[9]。术后疼痛往往发生在麻醉清醒后,一般持续24~72 h,调查患者术后第1天的疼痛程度,可基本反映手术的创伤程度。患者术后需要留置胸腔引流管引流胸腔积液,手术对患者创伤越小,则引流胸腔积液的量越少,留置引流管的时间也会缩短。
虽然胸腔镜辅助小切口手术也属于微创外科手术范畴,但达芬奇机器人手术的微创理念更进一步,具有如下特点:医生可以在放大15倍的高分辨率三维术野图像指导下,更清晰、精确地进行组织定位,并利用与之相匹配的动作缩减系统成比例(5:1或3:1)缩减外科医生的动作幅度,从而提高手术精度;医生对术野的自主平稳控制能够增强其手眼协调性,震颤过滤系统能够滤除手术医生手部的不自主颤动,两者相互结合,可提高手术操作的稳定性,使其能够完成复杂、精细的操作;机械臂上的关节腕具有多个活动自由度,更加灵活,拓展了手术人员的操作能力,使得系统末端的手术器械能够在狭小空间操作精细手术;手术时医生采取坐姿操作,在长时间的复杂手术中,可减少因疲劳犯错误的概率,增加手术的安全性[15,16];随着外科医生经验的丰富和对达芬奇机器人系统及其器械的熟练程度的增加,手术时间也会随之缩短。
近年来,随着腔镜技术的发展,外科微创技术也在逐步发展,达芬奇机器人把微创手术提高到了一个新的高度,达芬奇机器人把腔镜技术与计算机技术巧妙地结合起来,使腔镜技术更进一步。随着机器人技术在临床的推广使用,机器人的手术优势已明显凸显出来。在大量的临床实践中,胸腔镜技术的固有瓶颈也越来越受到外科医生的关注,无关节直长器械操作的活动度仅限于5个方向,明显限制了外科医生手的灵巧性,在人体狭窄而深在的角落很难进行常规手术;由助手控制的二维图像视野,使术者的手眼协调性降低,增加了操作难度;经套管针孔的长器械操作放大了术者手的不自主震颤,削弱了腔镜手术的精确性和稳定性,造成手术意外创伤的概率增加。因此,胸腔镜辅助小切口手术术中出血较达芬奇机器人手术会较多,术后引流量会增多,术后留置引流管时间也会随之增加。而达芬奇机器人在计算机的辅助下却能在胸腔里大显身手,医生的手部动作通过传感器在电脑中记录下来,同步翻译给机械臂的尖端,利用各种微创器械完成手术操作。两条机械臂的关节腕有2个关节,具有7个方向的活动自由度,手术操作更灵活,可在人手眼难以达到的地方顺利完成手术操作,如夹紧、转动、切割、缝合和组织牵张,另一条“助手”臂起牵引、稳定的作用。在手术过程中,机器人手术的切口最小是8 mm,最大的辅助操作孔不超过4 cm,术中使用切口保护器保护切口周围的神经、血管避免造成损伤,还可降低切口感染的概率,同时该系统还具有振动消除系统和动作定标系统,可保证机械臂在狭小的手术野内进行精确的操作[15-17]。
比起达芬奇机器人手术,胸腔镜辅助小切口手术术中为了扩大手术视野,提高器械操作的灵活性,需要使用肋骨撑开器撑开肋骨,会加重肋间血管和神经的损伤,术毕关胸还需要使用可吸收关胸线,关胸线穿过肋间肌肉,对肋骨、肋间血管、肋间神经是更进一步的损伤[18],因此,术后疼痛也较机器人手术重。
达芬奇机器人手术与胸腔镜辅助小切口手术相比,术中出血少,术后疼痛较轻,术后引流量较少,因此,手术对患者的创伤较小,减轻了患者的痛苦,术后引流管的留置时间也较少,缩短了患者的住院时间,更多的患者愿意选择达芬奇机器人手术。同样由于清晰直观放大的视野、灵活稳定的操作手臂和轻松舒适的手术操作方式,更多的外科医生愿意选择机器人手术。但其昂贵的设备和耗材价格限制其在临床上的广泛使用,其力反馈[19]缺乏的缺陷也需要进一步改进。
[1]陈恒琦,牟巨伟.电视胸腔镜手术治疗非小细胞肺癌的应用发展[J].健康必读杂志,2011,1(1):6-7.
[2]徐恩五,乔贵宾.肺癌的微创外科治疗[J].中华微创外科杂志,2012,12(8):748-751.
[3]张捷,王长利,孙酉甦.机器人时代的胸部肿瘤外科[J].中华医学杂志,2006,86(33):2372-2374.
[4]王述民,许世广,童向东,等.应用达芬奇机器人诊治肺周围小结节病变[J].中华临床医师杂志,2013,7(9):3759-3763.
[5]滕洪,王述民,曲家骐,等.电视胸腔镜辅助小切口肺叶切除术63 例报告[J].中国微创外科杂志,2008,8(7):591-593.
[6]Melzack R.The McGill Pain Questionnaire:major properties and scoring methods[J].Pain,1975,1(3):277-299.
[7]赵俊,张立生.疼痛治疗学[M].北京:华夏出版社,1994:33.
[8]张爱华.胸外科病人术后疼痛的护理[J].齐齐哈尔医学院学报,2012,33(10):1390-1391.
[9]刘君,何建行,黄俊,等.VATS术与SPT术对肺癌患者机体创伤的对比研究[J].中国肿瘤外科杂志,2009,1(1):33-35.
[10]Wall PD.疼痛学[M].沈阳:辽宁教育出版社,2000:283-294.
[11]张立生,刘小立.现代疼痛学[M].石家庄:河北科学技术出版社,1999:170-172.
[12]Melzack R,Terrence C,Fromm G,et al.Trigeminal neuralgia and atypical facial pain:use of the the McGill Pain Questionnaire for discrimination and diagnosis[J].Pain,1986,27:297-302.
[13]Turk DC,Rudk TE,Salover P.The McGill Pain Questionnaire reconsidered:confirming the factor structures and examining appropriate users[J].Pain,1985,21:385-397.
[14]赵英.疼痛的测量和评估方法[J].中国临床康复,2002,6(16):2347-2352.
[15]黄志强.21世纪外科从2D到3D-从腹腔镜到机器人[J].中华普外科手术学杂志,2010,4(3):1-4.
[16]嵇武,李宁,黎介寿.达芬奇手术机器人的应用前景[J].东南国防医药,2010,12(5):427-430.
[17]Byrn JC,Schluender,Dvino CM,et al.Three-dimensional imaging improves Surgical performance for both novice and experienced operators using the da Vinci Robot system[J].Am J Surg,2007,193:519-522.
[18]闾夏轶,徐湘,艾则麦提·如斯旦木,等.开胸术后疼痛的防治进展[J].中国肺癌杂志,2012,15(8):491-493.
[19]徐兆红,宋成利,闫士举.机器人在微创外科手术中的应用[J].中国组织工程研究与临床康复,2011,15(35):6598-6601.
