预测函数控制在感应电机调速系统中的应用
2014-06-13孟芳芳邵雪卷张井岗太原科技大学电子信息与工程学院太原030024
孟芳芳,邵雪卷,张井岗(太原科技大学电子信息与工程学院,太原 030024)
感应电机是一类在电力传动系统中应用最为广泛的电机,近年来,随着电力电子技术的发展,高性能的感应电机调速控制系统研究得到国内外的科研学者的青睐。Richalet与Kuntz等人在上个世纪九十年代提出了属于第三代预测控制算法的预测函数控制(Predictive Function Control,PFC)理论,并将这一控制算法成功应用于实际的控制系统中,取得了良好的控制效果[1-2]。预测函数控制可以解决一般模型预测控制算法存在的控制输入不规律的问题,因为它把控制输入量的结构做为核心问题,同时还具有控制量计算方程简单、跟踪速度快、鲁棒性强等优点。现在,预测函数控制以其优良的控制性能已经被广泛应用于工业生产及军事等领域[3-5]。
PFC控制应用于快速跟踪控制系统中较为常见的一种控制方法是PFC-PID串级控制,其控制的基本思想是先是对PID的参数进行调节并拟合为一个一阶的纯滞后系统,再把它做为一个广义的被控对象由外环的PFC进行控制,以此得到优良的跟踪效果及抗干扰能力[6-7]。但是PID控制器存在参数调节较复杂、适应能力差的缺点。采用内模控制对电机的电流调节器进行设计,可以取得良好的控制性能[8-10]。周渊深在感应电机的调速系统中使用双内模的控制方法,获得了比PID设计优良的动态特性[11]。
相对于其他先进控制算法,预测函数控制具有计算量小、跟踪速度快、鲁棒性强等优点,而内模控制的参数调节方便,且能抑制参数变化在系统性能上的影响,因此本文在感应电机的调速系统中采用预测函数-内模控制的串级控制方法。速度外环与电流内环分别采用预测函数和内模两种控制方法,以使参数设计中的复杂性与随机性得到降低。由仿真实验结果可以表明,采用本方法设计的系统在动、静态两个方面的性能都有显著的提高。
1 感应电动机数学模型
在M-T坐标系下,感应电动机按转子磁链ψr定向的数学模型为:
(1)
(2)
(3)
(4)

对公式(1)、(2)、(3)、(4)进行解耦,由参考文献[12]可知电流环等效传递函数为:
(5)
其中Tσ=(Lsσ+Lrσ)/(1+σ)Rs,Lsσ、Lrσ分别为定子漏感和转子漏感。
2 PFC-IM串级控制结构
在文献[11]的基础上,本文提出了图1所示PFC-IM双环控制结构的感应电机调速系统。在感应电机的调速系统中,对定子电流内环和转速外环分别采用内模控制与PFC控制。可以充分利用内模控制对电机参数的变化进行抑制及对不可预测的干扰进行消除从而提高系统的性能。

图1PFC-IM串级控制结构图
Fig.1ThecascadecontrolstructureofPFC-IM

3 电流调节器设计
由文献[12]知,感应电机的调速系统可以被解耦为三个相互独立的系统,这三个系统分别为转速控制、定子电流控制、磁链控制。图2所示为电流控制和转速控制的动态结构图。
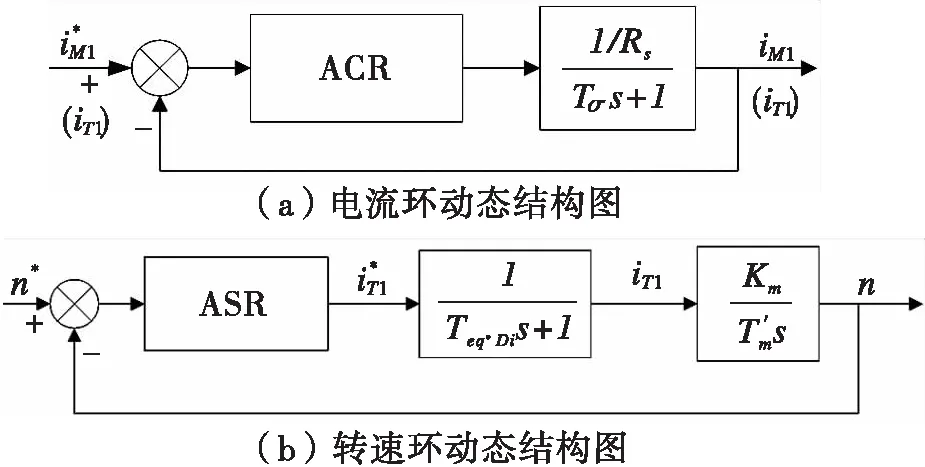
图2 动态结构图
图2(a)为忽视PWM波滞后时间的电流环动态结构图,对电流控制器(ACR)采用内模控制器设计方法,若模型恰与控制对象一致,可得:
(6)
取低通滤波器为:
(7)
式(6)中G(s)为最小相位系统,则内模控制器:
(8)
电流环控制器为:
(9)
由以上公式可以,内模控制器具有PI控制结构,有且仅有一个参数λi可调,计算公式简单,对未知干扰鲁棒性较强。
4 预测函数控制器设计
预测函数控制具有预测控制的基本特征,它与预测算法的最明显的不同就是重视控制量的结构形式,把控制量看为一组和对象特性及跟踪设定值相关的基于函数的系统组合。
图2(b)为转速环动态结构图,对转速环控制器(ASR)采用预测函数控制器设计方法,首先对已设计好的电流环进行等效。由图1可知电流环的输入输出分别为R(s)、Y(s).
(10)
假设内模控制系统模型和被控对象匹配,则电流环等效为:
(11)
(12)

把上式转换为线性离散状态空间方程为:
(13)
其中,Xm(k)是模型的状态向量;Ym(k)是模型输出;U是控制系统的输入;Am、Bm、Cm分别为模型状态方程的矩阵或向量系数。
在PFC中,可以由基函数线性组合得到控制量,而基函数的选取,要考虑过程特性及跟踪目标值。一般情况下可以选用斜坡函数、阶跃函数、抛物线函数等。
(14)
在上式中,u(k+i)是k+i时刻输出控制量;fj(i)是第i个采样时间基函数取值;N为选取基函数的数目;μj为权系数。本文跟踪转速信号为恒值,选择基函数为阶跃函数足够。
为了防止出现控制量的剧烈变动及超调,常见的选择预测时域内参考轨迹如下所示:
ωr(k+i)=yr(k+i)-ai(yr(k)-yp(k))
(15)
其中:ωr(k+i)为k+i时刻的参考轨迹值;yr(k+i)为k+i时刻的设定跟踪值;yp(k)是被控对象在k时刻的输出实际值;α=e-Ts/(T/3),0<α<1,Ts是采样周期,T是闭环响应时间。α的设计会对闭环系统的动态特性及鲁棒性能产生影响。且随着T的减小α也会变小,则参数轨迹将更加快速的逼近设定值。
预测函数控制是以在选择的预测时域拟合点上的预测过程输出及参考轨迹差的平方和最小为标准选择优化目标函数。最小化的计算标准式可取为:
(16)

在系统的运行中,会发生参数变化、模型失配和干扰等情形。PFC做为闭环的控制方法,在实际情况下控制系统中会有一定程度误差的存在,将未来预测优化时域内的预测误差取为:
(17)
由以上推导计算可以得到PFC的控制作用在k时刻计算式如下:
u(k)=k0(c0(k)-yp(k))+VxXm(k)
(18)
在预测函数中,可以根据系统控制特性提前确定的量有:基函数选取类型、拟合点的数值、预测函数模型、控制器采样周期、所期望参考轨迹的闭环响应时间。控制量中计算式的系数K0、Vx可离线计算取得,并且c0(k)、yp(k)在k时刻均为已知,简化了控制量的在线计算。
5 仿真分析
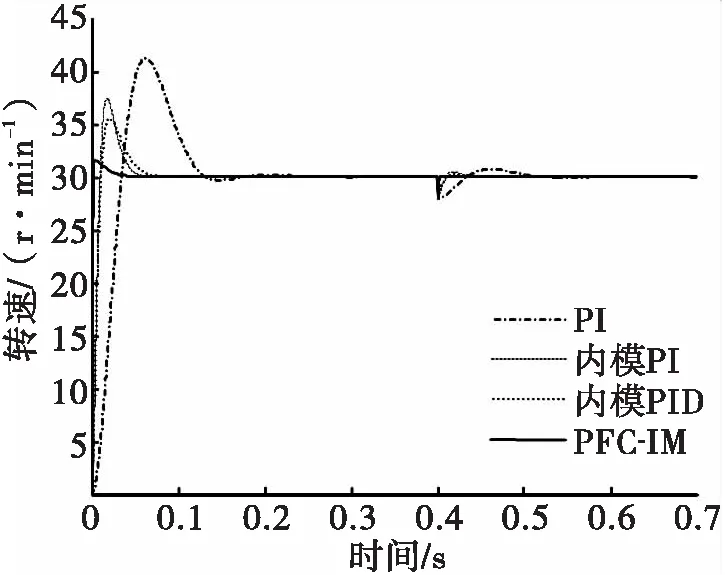
图3 跟踪恒速时不同控制器转速输出波形
由仿真结果图3可知,PFC-IM串级控制在转速响应时间、超调量明显小于其它传统的控制方法,仅为效果相对较好的内模(PID)的时间的一半0.02 s,超调量的三分之一为2 r·min-1.当系统在t=0.4 s加入阶跃负载转矩时,能最快回到稳态值。由图4可知在跟踪含有斜坡、阶跃不同速度信号时,PFC-IM串级控制调节性能仍保持较强的优越性。在图5中模型参数发生较大的变动,本设计方法转速上升时间为0.04 s,超调量为3 r·min-1,稳态时间为0.08 s,而传统的控制方法动静态特性明显要差许多,证明该方法具有较强鲁棒性。
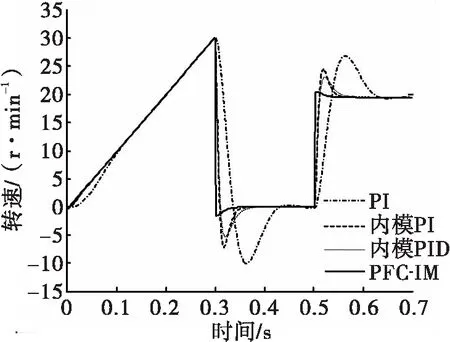
图4 跟踪不同速度信号不同控制器的转速输出波形
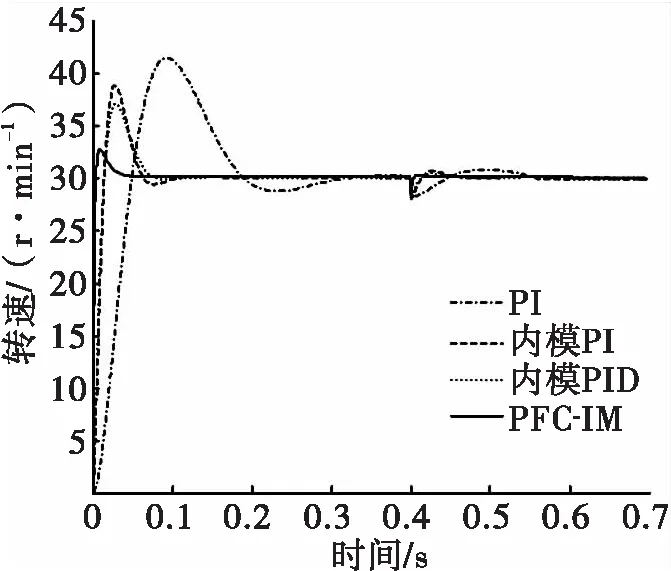
图5 模型失配时采用不同控制器转速输出波形
6 结论
该设计结合预测函数和内模控制的优点,提出了PFC-IM控制算法,并通过仿真分析,证明了该方法在感应电机调速系统中的有效性。预测函数控制具有跟踪快速与鲁棒性强的优点,而且可调函数有明确的物理意义。内模控制因为只有一个参数需要调节,所以调节过程非常简单。因此,该控制策略易于工程实现,具有较高的实际应用价值。
参考文献:
[1] KUNTZE H B,JACUBASCH A,RICHALET J,et al.On the Predictive Functional Control of an Elasti Industrlal Robot[C]∥Proc of the 25th CDC,Greece:1986:1877-1881.
[2] RICHALET J.PREDICTIVE.Functional Control:Application to Fast and Accurate Robots[C]∥Proc of the 10th IF-AC World Congress,Munich,1987:251-258.
[3] 夏泽中,张光明.预测函数控制及其在伺服系统中的仿真研究[J].中国电机工程学报, 2005,25(4):130-134.
[4] 刘钢,范大鹏,李圣怡.预测函数控制及其在火箭炮控制系统中的应用[J].弹箭与制导学报,2003,23(3):43-45.
[5] ALINE I,MAALOUF.Improving the Robustness of a Parallel Robot Using Predictive Functional Control(PFC)Tools[C]∥Proceedings of the 45th IEEE Conference on Decision & Control,San Diego,CA,USA,2006,11(5):6468-6473.
[6] 刘钢,李圣怡,范大鹏.机电伺服系统的预测函数控制算法研究[J].国防科技大学学报,2004,26(2):89-93.
[7] 曲峰林,王朝辉.交流伺服系统PFC-PID串级控制的仿真研究[J].武汉科技大学学报:自然科学版,2006,29(2):151-154.
[8] 秦刚,谭进,吴丹怡,等.内模PID控制器在无刷直流电机调速系统中的应用[J].电子设计工程,2012,20(12):42-45.
[9] 李志坤,让余奇.基于内模控制的直流无刷电机调速系统设计[J].舰船电子工程,2009,29(2):188-191.
[10] 宋春华,胡丹,柯坚.内模控制在电流调节器中的应用[J].电力自动化设备,2008,28(4):15-18.
[11] 周渊深.感应电动机交-交变频调速系统的双内模控制研究[J].电气自动化,2006,28(2):3-7.
[12] 马小亮.矢量控制系统的解耦与调节器设[J].电气传动,2009,39(2):3-10.