新型轮机仿真平台实操考试自动评估算法
2014-06-12张巧芬孙建波史成军孙才勤
张巧芬,孙建波,史成军,孙才勤
(大连海事大学轮机工程学院,辽宁大连116026)
新型轮机仿真平台实操考试自动评估算法
张巧芬,孙建波,史成军,孙才勤
(大连海事大学轮机工程学院,辽宁大连116026)
针对国内外轮机模拟器在操作考试和自动评估方面功能的不足,提出了一种基于专家系统评分规则的模糊评估算法并应用于轮机虚拟现实仿真平台。该算法采用通用试题评估规则表来设置各道试题的具体评估规则,实时跟踪操作考试过程中相关变量的变化,进行答题过程评估和答题结束评估。评估过程中选用合适的隶属函数来计算变量在检测范围内的隶属度,操作结束时自动打分并提供可查询的扣分记录。实例中基于此平台的实操考试自动评估结果与专家系统评分结果一致,验证了该算法的可行性。该新型轮机实操考试与自动评估系统打破了传统的船员考试制度,能够真正意义上地提高船员实操和管理能力。
轮机;仿真;虚拟现实;实操;专家系统;评估算法;隶属函数
随着我国航运事业和现代科技的高速发展,现代航海技术也在日新月异,船舶也在向着大型化、专业化的方向发展,这种发展趋势对船员的管理水平和实操水平的要求越来越高[1]。此外,2012年1月 1日开始生效的STCW公约修正案已明确将机舱资源管理定为强制性适任标准,并新增领导力和团队工作技巧的使用(操作级)和领导力和管理技巧的使用(管理级)的强制性适任能力[2]。
为使我国船员考试和评估体制满足新的要求,中国海事局在船员考试体制改革方面做了大量的工作,例如在船员考试中引入多媒体试题,但试题仍然没有摆脱传统试题的框架,考试无法真正体现学员的实际操作水平、分析和解决问题的能力。轮机模拟器是船员教学、培训和考试的重要手段,但是目前传统的轮机模拟器都是基于硬件设备制造的,跟实船场景还有很大差距[3],其操作评估依然采用人工评估,考试试题不具有开放性,系统无法实时动态改变初始状态,不具有考生应答系统,无法实现实操考试的自动评估[4]。
针对这些不足,大连海事大学教育部“海运工程虚拟仿真实验教学中心”轮机虚拟仿真实验室在中国海事服务中心的资助下共同开发一种新型的轮机虚拟现实仿真平台,并在此基础上提出了一种基于专家系统评分规则的模糊评估算法,应用于轮机实操考试的自动评估。
1 轮机实操考试与自动评估系统组成
该轮机仿真平台是一种基于虚拟现实技术[5-6]的新型仿真平台,它由轮机系统仿真模型、试题库导入平台、智能动评估推理机、考生站和教练员站构成,其组成结构如图1所示。

图1 轮机仿真平台实操考试与自动评估系统组成Fig.1 Composition of operation examination and intelligent evaluation system based on marine engine simulator
轮机系统仿真模型包括柴油机动力装置及其控制系统、船舶电站,以及锅炉、分油机、液压舵机等其他模型,这些子系统的建模与仿真是整个轮机虚拟仿真平台的基础;试题导入平台从海量试题库中抽取考题及其相关评分规则用于实操考试与自动评估,试题库的建立由业内专家出题完成;推理机融合专家系统评估规则,集成了实时检测、结束检测和时段检测算法,对考试过程和结果进行自动评估;考试终端和考试中心通过网络通信以人机交互方式与系统进行对话。
海船船员实操考试内容具有多样性和复杂性,每一道试题有其各自的初始化状态。为了满足考试要求,该仿真平台实现了系统初始状态随试题的变换而瞬时更新,并可对其进行补充和修改。
2 自动评估算法
2.1 评估规则的设置
轮机仿真平台的评估内容有操作级和管理级2种,但课题设计的自动评估算法不区分这2种评估内容,而是统一地将评估的试题类型分为4种:参数修改、应急处理、故障判断和操作。无论是哪一种试题,均可看成由若干个“操作”和“性能参数”组成。所谓“操作”是指完成试题所需的步骤,分有顺序要求和无顺序要求2种;“性能参数”是用来反映操作过程中相关状态变化的参数。不管是“操作”还是“性能参数”,在评估算法中都以变量的方式来进行描述,每一个操作或性能参数对应一个变量。试题的评估过程就是实时跟踪该试题包含的各个变量在实操过程中的变化情况。
轮机仿真变量可多达20万个,基本上涵盖了实操考试内容的各个方面,若不将这些变量的评估规则统一起来,则算法实现起来非常困难。因此试题通用评估规则表,如表1所示,具有化繁为简的作用,适用于任何一道试题。评估规则表以变量为对象,描述了每道试题的具体评估要求,是进行试题自动评估的惟一依据。

表1 试题通用评估规则Table 1 The universal evaluation rules for exam questions
表中各项的含义如下:
1)变量描述:描述该变量的具体含义。
2)变量名称:该变量的名称。
3)变量类型:布尔型、整型和浮点型。
4)检测要求:实时检测、结束检测和时段检测。其中时段检测要求在操作过程的某个时段进行实时检测,在此时段以外不检测。
5)检测类型:根据变量类型和上下限值,给出检测值的范围,作为评分的标准。
6)检测上(下)限——变量的正确变化范围。
条件集合:检测该变量的所有条件,用集合的形式表示。NULL表示空集。
7)条件级别:用数字1、2、3……从高至低表示操作的优先级,不同变量条件顺序相同表示优先级相同,无顺序先后之分。NULL表示无条件顺序。
8)分值:评分项分值,有加分和减分2种机制。变量所代表的“操作”或“性能参数”的意义越重要,其分值越高。对于某些非常重要的操作,其分值可设为-100分,一旦操作失误则该考题得分为0分。若变量代表的是条件,其分值为0分。
每道考题有其默认的评估规则,由专家出题者完成。此外出题者或教练员在答题前还可以根据具体情况对其进行修改或补充。评估规则的设置除了表1所包含的内容外,还包括评分机制(加分或减分)、答题时间、评分项、变量隶属函数的选择等。
2.2 评估过程
1)计算总分Score
通常船员实操考试采用百分制,有m道考题,总得分的计算公式如下:

式中:Si为第i道考题的百分制得分;kf为扣分系数,若考生延迟答题(系统允许的情况下),则在正常总得分的基础上乘以一定的扣分系数作为考生最后的得分,kf∈0,1[];wi为其对应的权重系数,权重系数由出题专家给出,也可采用层次分析法[7]来确定,满足

2)计算每一道试题的百分制得分Si
每一道考题有n个评估变量,对应有n个评分项,每个评分项的得分为si(i=1,2,3,…,n),若变量表示的是一个条件,则其变量分值为0。若采用加分机制计分,则试题最后的得分:

若采用减分机制计分,则试题最后的得分:
3)计算评分项得分si
定义布尔变量sci(i=1,2,…,n )为评分项得分系数,sci∈[0,1],初始值为NULL。因此评分项得分:

4)计算评分项得分系数sci
实操考试与自动评估系统中的变量有“操作”变量和“性能参数”变量2类,其中“操作”变量代表的是相关阀件和按钮的操作,其对应的评分项得分系数非“1”即“0”,因此其评估结果明确公正,其隶属函数可采用单点隶属函数。而“性能参数变量”通常评分范围是在某一范围内,若笼统地采用“变量值在检测范围内得分标志为1,否则为0的评估规则,评估结果不尽合理。
因此对于评分项得分系数sci,可采用模糊评估的方法,即根据变量性质和检测范围选用合适的参数模糊隶属函数,用以计算“性能参数”变量的得分系数,使其为闭区间[0,1]上的连续值。表示条件的变量其评分项得分系数非1即0。
定义集合A为论域U中的一个模糊集合,其隶属函数μA(x)表示元素x相对于A的隶属程度,即

常用的隶属函数有三角隶属函数、梯形隶属函数、Gaussian隶属函数、K次抛物线隶属函数(包括偏大型、偏小型和中间型)、Sigmoid隶属函数、钟形隶属函数等[8-9],也可以采用数值方法拟合构造[10]。
隶属函数μA(x)的确定可以依据评估变量类型和变量检测范围的最佳值位置来选择合适的隶属函数,其选择原则如下:
对于“操作”变量,采用单点隶属函数:
式中:xi(i=1,2,…,n)为论域中的取值点。
对于“性能参数”变量,若变量检测范围无最佳值,则当变量位于检测范围内μA(x)=1,反之μA(x)=0。若变量检测范围有最佳值,对于最佳值越大越好的性能指标,选用单调递增函数;对于最佳值越小越好的性能指标,选用单调递减函数;对于最佳值是一个定值或区间的性能指标,则其隶属函数在最佳值或区间处有极大值,μA(x)=1。
5)具体评估流程
本文将所有评估变量VNi(i=1,2,…,k )看成一个集合,定义集合V={VN1,VN2,…,VNk},根据检测要求,可以将集合分成2个子集,V1表示实时检测变量和时段检测变量的集合,V2表示结束检测变量集合:

评估过程分答题过程评估和答题结束评估2部分,答题过程评估对集合V1的变量进行评估,在系统规定的答题时间对V1的变量巡检,如图2所示。答题结束评估对集合V2的变量进行评估,在答题结束时对集合V2的变量进行检测,如图3所示。

图2 答题过程评估流程图Fig.2 Flow diagram of evaluation during answering process
根据评估规则的要求,集合V1中的所有元素要不是在整个操作过程中进行实时检测,要不就在规定的某个时段进行实时检测,在整个检测过程中,一旦变量值不符合检测范围,其对应的得分系数就为0,系统将停止对其检测。对于集合V2中的元素,只要求在结束答题之后进行检测,同时根据对一个变量进行评分是否需要条件,可以将集合V2中的变量又分为子集V21和V22:

集合V21中的变量检测不需要满足条件,为表示条件或者不带条件的结论的变量集合,其对应的条件集合CSi(i=1,2,3..k)=Ø;集合V22中的变量的检测需要满足一定条件,CSi(i=1,2,…,k)∈VN21,可以是单条件,也可以是多条件,条件还可能有顺序要求。所以,在对集合V22中的变量进行检测前,首先判断其条件是否满足,其次再判断条件是否满足顺序要求,只有满足了变量的条件要求才能对变量进行检测。
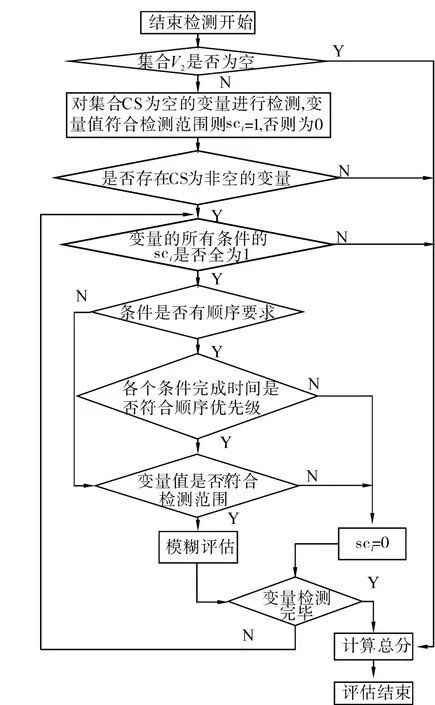
图3 答题结束评估流程图Fig.3 Flow diagram of evaluation at the end of answering
3 实例分析
本文以题库中编号为1011的“集控室-机旁控制位置转换(ACC20)”考题为例,验证该评估系统的可行性。考题要求“按正确的操作顺序从集中控制室转换到机旁控制,转换后正车半速起动主机,并将主机转速调整在30~40 r/min范围内”,答题时间为300 s。答题以点击“开始”按钮开始,以点击“完成”按钮结束,或答题时间到自动结束。
3.1 仿真平台初始化
该考题的初始状态:集控室控制,备车完毕,主机处于停止状态,2号发电机合闸供电,1、3和4号发电机处于停止状态。如图4所示为考题1011的系统初始化。

图4 考题1011的系统初始化Fig.4 System initialization for question 1011
3.2 考生答题与自动评估
该系统的部分虚拟现实操作场景如图5所示。图5为机旁操作界面,图6为ACC20主机遥控系统的集控室车钟界面。

图5 机旁操作界面Fig.5 Interface of the operation beside engine

图6 集控室车钟界面Fig.6 Interface of the telegraph in control room
1)驾驶台和集控室操作部位转换,分值为-20分;
2)脱开调速器,分值为-100分;
3)机旁转换,分值为-100分;
4)完成应急车钟的通讯:驾驶台给出半车起动车令,机旁回车令,分值为-20分;
5)转动油门手柄,按起动按钮起动主机,将柴油机转速调整至30~40 r/min,分值为-10分。
其中2)和3)顺序不能调换,否则会扣去50分。
若考生在规定的考试时间内完全按照要求操作,且最后柴油机转速稳定在35 r/min,专家系统打分为100分,系统自动评估的成绩也为100分。
若考生在规定的考试时间内也完成了操作,但其操作步骤2和3顺序调换了,按照专家系统打分,该评分项得分为-50分,且最后柴油机的转速稳定在55 r/min,很大程度地偏离规定范围,评分项得分为-10分。因此专家系统打分为40分,系统自动评估的成绩也为40分,评估记录如图7所示。

图7 40分评估记录Fig.7 Evaluation details of 40 scores
4 结论
1)课题提出的基于轮机仿真器实操考试自动评估算法能够针对不同的操作和性能参数选用不同的隶属函数进行评分,评估过程完全模拟专家系统评估,评估结果合理公正。
2)该新型轮机虚拟仿真平台实操考试自动评估系统的开发旨在真正提高船员实操和管理能力,并推进我国船员考试制度的改革。目前该系统已在部分海事院校初步应用,承担起船员教学和培训的任务。随着系统平台的日益完善和成熟,将得到进一步的推广和应用。
[1]贾宝柱,林叶锦,曹辉.轮机模拟器中机舱资源管理培训及评估功能[J].中国航海,2013,36(3):28-33.JIA Baozhu,LIN Yejin,CAO Hui.Engine-room resource management training and assessment module in marine engineering simulator[J].Navigation of China,2013,36(3):28-33.
[2]金一丞,尹勇.STCW公约马尼拉修正案下的航海模拟器发展战略[J].中国航海,2012,35(3):5-10.JIN Yicheng,YIN Yong.Development strategy of marine simulator in light of the Manila Amendments to STCW Convention[J].Navigation of China,2012,35(3):5-10.
[3]曾青山,陈景峰,黄加亮.轮机模拟器的现状和发展趋势[J].集美大学学报:自然科学版,2003,8(1):74-79.ZENG Qingshan,CHEN Jingfeng,HUANG Jialiang.The present situation and development trend of marine simulator[J].Journal of Jimei University:Natural Science,2003,8(1):74-79.
[4]聂伟,巫影,胡大斌.轮机模拟器考核自动评分算法研究[J].武汉理工大学学报:交通科学与工程版,2013,37(4):834-838.NIE Wei,WU Ying,HU Dabin.Research of automatic scoring arithmetic for examination of engine room simulator[J].Journal of Wuhan University of Technology:Transportation Science&Engineering,2013,37(4):834-838.
[5]邱世广,武殿梁,范秀敏.基于船舶人机工程的虚拟人操作驱动建模仿真技术[J].上海交通大学学报,2012,46(9):1366-1370.QIU Shiguang,WU Dianliang,FAN Xiumin.Ship ergonomics evaluation based on virtual human real-time driven modeling technology[J].Journal of Shanuhai Jiao Tong University,2012,46(9):1366-1370.
[6]BUKHARI A C,KIM Yonggi.A research on an intelligent multipurpose fuzzy semantic enhanced 3D virtual reality simulator for complex maritime missions[J].Applied Intelligence,2013,38(2):193-209.
[7]SUN Lu.A min-max optimization approach for weight determination in analytic hierarchy process[J].Journal of Southeast University,2012,28(2):245-250.
[8]孙杰,张晓,牟在根.不同隶属函数对地下连续墙模糊可靠度影响的分析[J].岩土力学,2008,29(3):838-840.SUN Jie,ZHANG Xiao,MU Zaigen.Analysis of effect of different membership function on calculation of fuzzy reliability in underground continuous wall[J].Rock and Soil Mechanics,2008,29(3):838-840.
[9]任慧龙,贾连徽,李陈峰.船体结构应力监测系统的滤波器设计[J].哈尔滨工程大学学报,2013,34(8):945-951,971.REN Huilong,JIA Lianhui,LI Chenfeng.Filter design of ship structure stress monitoring system[J].Journal of Harbin Engineering University,2013,34(8):945-951,971.
[10]袁杰,史海波,刘昶.基于最小二乘拟合的模糊隶属函数构建方法[J].控制与决策,2008,23(11):1263-1266.YUAN Jie,SHI Haibo,LIU Chang.Construction of fuzzy membership functions based on least squares fitting[J].Control and Decision,2008,23(11):1263-1266.
An automatic-evaluation algorithm for the operation examination of the novel marine engine simulation platform
ZHANG Qiaofen,SUN Jianbo,SHI Chengjun,SUN Caiqin
(Department of Marine Engineering,Dalian Maritime University,Dalian 116026,China)
Aiming at the deficiencies of domestic and foreign marine engine simulators,based on the aspects of crew operation examination and automatic-evaluation,a fuzzy evaluation algorithm based on the expert system assessment rules has been proposed and applied to the marine engine virtual reality simulation platform.This algorithm was accomplished by setting the evaluation rules specific to each question according to a common evaluation rule table initially,and then tracking the variables during the whole operating process.The evaluation proceeded during and after the examination.A proper membership function was chosen to calculate the membership degree for each variable during the evaluation,and a reasonable score was given after the evaluation with a queryable evaluation record.Finally an operation example was taken.The evaluation results being consistent with the scores given by the expert system show that the feasibility of the algorithm is well verified.The novel marine engine simulation platform designed for operation examination and automatic-evaluation has broken away from the traditional form of crew examination,which can improve the operational and management ability of the crew in a real sense.
marine engine;simulation platform;virtual reality;operation examination;expert system;evaluation algorithm;membership function
10.3969/j.issn.1006-7043.201304033
http://www.cnki.net/kcms/doi/10.3969/j.issn.1006-7043.201304033.html
TP391.6;U664.82
A
1006-7043(2014)06-0725-06
2013-04-08.网络出版时间:2014-05-14 15:51:57.
国家863计划资助项目(2011AA110201)
张巧芬(1986-),女,博士研究生;孙建波(1963-),男,教授,博士生导师.
张巧芬,E-mail:qiaofen26@163.com.