基于改进粒子群算法的复杂地况下雷达布站优化
2014-06-12刘砚菊宋建辉
刘砚菊,胡 杨,于 洋,宋建辉
(沈阳理工大学,沈阳 110159)
基于改进粒子群算法的复杂地况下雷达布站优化
刘砚菊,胡 杨,于 洋,宋建辉
(沈阳理工大学,沈阳 110159)
针对现有雷达布站数学模型不能解决复杂地况下的雷达布站问题,提出了一种复杂地况下的雷达布站数学模型,该模型解决了雷达在复杂地况下布站位置受限的问题。在此基础上,提出了基于改进粒子群算法的复杂地况下的雷达布站优化算法,该算法改善了现有粒子群算法中期搜索性能不强的缺陷。仿真结果验证了提出的改进雷达布站数学模型的可行性和基于改进粒子群算法的复杂地况下雷达布站优化方法的有效性。
复杂地况,雷达布站,数学模型,粒子群算法
引言
雷达布站是雷达组网技术中一个很重要的部分。雷达组网是一种低成本[1-2],高效益的手段,它的目的是使多雷达形成一个有机整体,提高整个雷达网的探测能力和生存能力。雷达网的信息融合是在多个雷达采集的信息间有交汇的情况下进行的,因此,为了信息融合顺利进行,需要对给定雷达资源的参数信息充分分析,并对其合理有效地布站,使雷达的交互能力最强。布站作为雷达组网首要解决的问题,受到了越来越多研究人员的重视。
传统的雷达部署主要考虑各雷达威力图之间在距离、高度、频段上的交替、衔接及冗余度[3],但缺乏严格的数学规划,难免造成资源浪费、低效重复。文献[4-6]提出了几种具有严格数学规范的布站数学模型,但是没有充分考虑实际地理环境的限制,对包含不可达地区的情况不能有效地布站。本文在研究常见雷达布站数学模型的基础上,提出了一种改进的雷达布站数学模型。
雷达网的布站属于组合优化的问题,粒子群算法具有很强的处理这类问题的能力,所以利用粒子群算法来优化雷达布站的数学模型可以得到很好的效果。文献[7-9]从不同角度对基本粒子群算法进行改进,都相应地增强了算法的性能,但上述算法迭代的中后期进入局部搜索的速度相对缓慢,不仅浪费运算时间,而且影响算法的求解精度。本文提出一种改进的粒子群算法,使算法在不同迭代时期合理的进行自适应搜索,并提高了求解精度。
1 雷达布站数学模型
1.1 常见的雷达布站考虑因素
“四大威胁”是影响雷达生存能力和探测能力的主要因素,即电子干扰、隐身目标、反辐射导弹和低空突防[10],因此,组网的雷达需要有一定的“四抗”能力,这就需要使主要方向、重点角度、主要高度层中雷达网对目标区域覆盖冗余度最大;雷达能够相互补盲;避免相邻雷达同频干扰;避免资源浪费。
1.1.1 空域覆盖系数

ρ描述的是整个雷达网的空域探测能力,它的取值越大在责任区内雷达网的空域覆盖冗余度越高,取值范围为[0,1]。
在实际情况下,责任区某部分区域理应受到重点防护,即重点监测区域。

θ为重点监测区域的空域覆盖系数,它的取值范围为[0,1]。而且要求θ≥ρ。
1.1.2 空域覆盖重叠系数
空域覆盖重叠系数描述责任区内雷达网的空间重叠覆盖程度。空域重叠覆盖是雷达网信息融合的前提,重叠覆盖度越大,则雷达的交互能力越强,获得的目标信息就越精确,空域覆盖重叠系数用μ来表示:

μ表示的是两部或两部以上的雷达之间探测重叠区域占总责任区面积的比重,取值范围为[0,1]。
1.1.3 频率干扰系数
频率干扰系数是对相邻雷达间同频干扰程度的体现。可用公式(4)来描述:
为了使雷达网达到最佳抗干扰性能,要避免同频干扰,它的取值范围是[0,1]。
1.1.4 资源利用系数
雷达组网需要充分利用已有资源,使其协同工作,尽量避免资源浪费,假设3部及以上的雷达在责任区内的有效覆盖区域有重叠为浪费资源,3部以下为合理,则资源利用系数τ可以描述为:
可见τ的取值范围为[0,1],τ越大表示组网雷达的资源利用越合理。
1.1.5 相邻雷达距离限制
应使相邻的雷达实现信息的交互,所以距离要有一定限制,以达到相互补盲的功能,相邻雷达的距离用式(6)来约束。

一般取rij=max(ri,rj),其中 rij=max(ri,rj)为雷达i、j探测距离的最大值。
雷达网布站实施的过程中,在责任区范围内,难免会遇到河流、沼泽等不可达的区域,使雷达网不能按照事先制定好的方案进行布置。因此,在布站方案制定阶段,就应该剔除掉这些不可达区域,使制定好的方案得以顺利执行。
1.2 改进的雷达布站数学模型
篇章格律论是对Halliday衔接理论的补充与延展,它将Halliday等从语法角度提出的句子层面以上非结构性衔接理论补充、扩展至超越小句的语篇层面,关注语篇的旋律,为我们从结构上对语篇衔接进行分析提供了新的有效手段。
要直接剔除不可达区域并不容易,因为防区是一个连续的区域,形状极不规则,因此,用数学公式很难对其进行描述,因而不可达区域难以对布站形成有效的约束条件,使雷达网布站的数学模型难以建立。本文提出一种解决上述问题的办法,步骤如下:
第1步,网格划分,把防区范围用等间隔的网格线对其进行分割,如下页图1所示。每一个网格代表给定责任区的一部分,定义为布站网格。图1中深色部分为不可达区域。
第2步,描述矩阵,建立一个与布站网格行列数相同的1矩阵。矩阵中的每个元素与布站网格相对应,将这个1矩阵定义为描述矩阵。
第3步,根据责任区的实际地形改变约束矩阵的值,如果布站网格中的区域可以布站,则约束矩阵中的相应位置的值就为1不变;布站网格中的区域如果不可达,则约束矩阵中相应位置就改为0,表示不可以布站。如图2所示。
第4步,坐标表达,将实际地形用坐标表示出来,映射描述矩阵的值到布站网格上,则离散化后的责任区中不可达地区就可以用表达式描述。在实际布站制定方案时,剔除表示式中的坐标值。

图1 布站网格

图2 描述矩阵
通过这种方法就可以简单地排除掉了不可达地区的影响,不可达地区的表达式对布站模型形成了有效约束条件。布站网格的大小要根据实际给定的责任区域来选择,网格越小则对不可布站区域的描述就越精确,但是计算量也会随之增加,因此,根据实际地况来决定布站网格的大小是非常重要的。
优化布站时责任区内不可达区域可以用式(7)描述:


式中Sda表示责任区内可放置雷达的区域。
式(8)从实际情况出发,对雷达布站时地理位置的选择进行了有效约束,使制定雷达布站方案时避开了选择不可达地区,因此,增加式(8)作为雷达布站数学模型的限制条件。改进后雷达网优化布站的数学模型如下:
其中K1、K2、K3、K4、K5是加权系数,根据对雷达网性能的倾向性来确定系数的大小。本文取K1=K2=K3=K4=K5=1/5,为均衡考虑。
2 雷达布站优化算法
2.1 现有粒子群优化算法
粒子群算法(Particle Swarm Optimization,PSO)于1995年由Eberhart和Kennedy[12]受鸟群觅食过程中的迁徙和群聚行为的启发而提出的一种基于群体的全局智能优化算法。基本粒子群算法按照下面的公式更新速度和位置。

其中,ω为惯性权重,是粒子对历史速度的继承。较大的ω值会加强种群的全局搜索性能,较小的ω值会增强粒子的局部搜索能力。选择合理的ω对平衡算法的全局和局部搜索能力起重要作用;c1、c2为“学习因子”。c1被称为“自我认知”,是跟踪自己当前最优解的权重系数。c2被称为“社会认知”是跟随种群迄今最优值的权重系数。
文献[11]提出了一种采用扰动加速因子自适应粒子群算法,惯性权值函数为:

式中,t为当前迭代次数;Tmax为最大迭代次数。可以看到惯性权重的值随着迭代次数的增加,从起始值ωmax呈余弦函数减小到ωmin。通过ω的变化可以使种群在算法初期具有较高的全局搜索性能,在算法的后期具有很强的局部搜索能力。
但是,粒子群算法具有高速搜索的能力,经历到算法迭代的中期种群已经接近全局最优值,所以此刻应该使粒子群迅速进行局部搜索。而文献[11]在算法中期惯性权值的变化相对平缓,进入局部搜索速度缓慢,本文在此基础上提出一种惯性权值ω变化的新策略。
2.2 改进后的粒子群优化算法
在算法前期ω按照0到π之间的余弦函数递减变化,在算法中后期ω按照指数函数递减变化。变化方式如下所示:
式中,ω1、ω2为设定的惯性权重ω的初始值与最终值,i为当前迭代次数,me为迭代的总次数,ω3为i=me/2时ω的值。可以看到,在算法初期,ω的变化比较平缓,算法具有比较大的全局搜索速度;在算法中后期ω的值会按照指数函数的变化曲线迅速减小,使整个种群更快地进入到局部搜索。而且,在粒子群算法的后期具有的惯性权值变化更加平缓,利于找到最优解。
本文加速因子的取值采用文献[11]策略。其中c1是线性递减的,c2是线性递增的。加速因子的变化方式如下:
式中,flag表示从上一次迭代开始,全局最优值连续没有更新的次数。k是一个确定的整数,为设定值。
3 实验结果与分析
3.1 改进粒子群算法的性能测试
本文改进的雷达布站数学模型是一个多峰值函数,因此,选用Rastrigin、Rosenbrock两个经典的多峰值测试函数对算法的性能进行测试,它们的最优值都为1。
粒子群算法的参数如下,粒子群个数n=20,粒子的最大速度maxV=20,起始惯性权重ω1=0.9,终止惯性权重 ω2=0.4,c1的取值范围为2.75~1.25,c2的取值范围为0.5~2.25,k的取值为9,最大迭代次数为3 000。设定算法连续100次迭代的适应度函数值不发生变化算法停止。用文献[11]的算法,以及本文的改进算法优化测试函数,各运行30次取平均值得到的结果如表1所示。
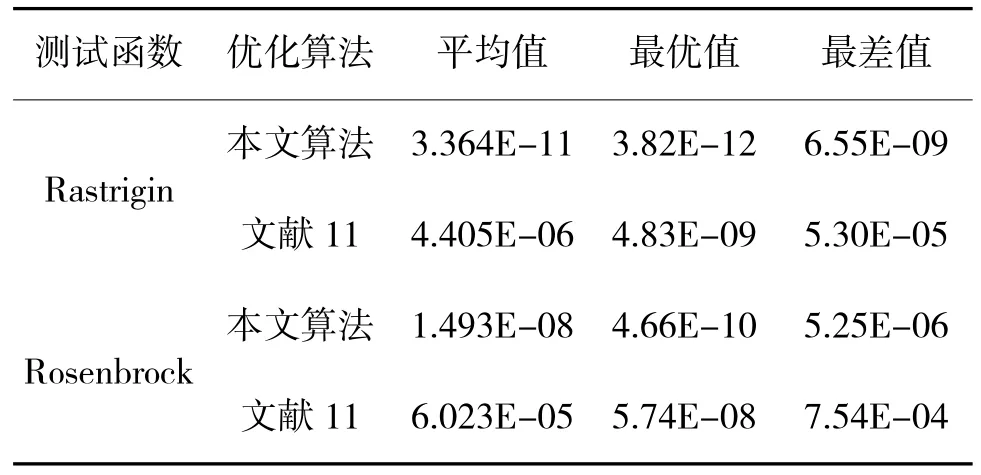
表1 测试函数优化结果
从表1可以看出,用改进算法来优化测试函数Rastrigin和Rosenbrock取得结果的平均值、最优值及最差值的精度都高于文献[11]算法。体现了粒子群改进算法的有效性。图3、图4为两种算法优化测试函数的适应度曲线图,从中可以看到,改进的优化算法在迭代的中后期进入搜索局部的速度更快,提高了搜索性能,利于得到最优值。
3.2 雷达布站
假设给定的责任区为[0,100;0,80]的坐标区域,坐标在[30,70;20,60]为重点探测区域的范围。雷达的个数为5,雷达的探测半径相同,都为r=25,且雷达的频率不重叠,不可布站区域如图5橙色部分所示,布站网格的宽度取0.01。
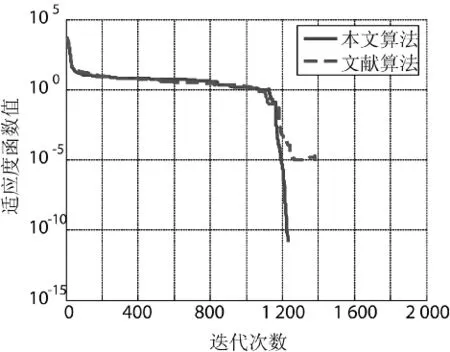
图3 Rastrigin函数优化结果对比

图4 Rosenbrock函数优化结果对比
从算法的性能测试结果可以看出,本文改进的PSO算法在迭代进行的中后期能够更快的进行局部搜索,且能够获得更高的解精度,因此,选用本文改进的PSO算法来优化雷达布站数学模型,优化改进前后的雷达布站数学模型得到的雷达坐标如表2所示。

表2 优化不同雷达数学模型取得的雷达坐标
由表2中优化得到的雷达坐标值绘制的实际布站的对比效果如图5、图6所示。
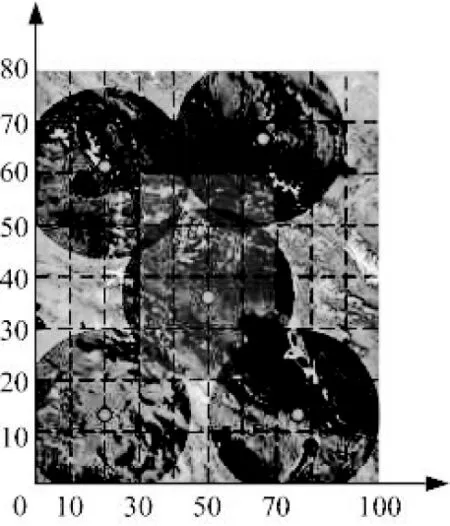
图5 本文算法优化改进的布站模型

图6 本文算法优化未改进的布站模型
由图6的效果图可以看到,在雷达实际布站情况下,给定责任区内有不可达的地域时,用未改进的雷达布站数学模型来制定雷达部署方案,可能会使事先制定好的方案中某些雷达的坐标落入不可达地区,使布站方案不能够顺利实施。而图5中用改进的雷达布站数学模型制定的雷达布站方案就不会出现上述情况。
4 结 论
通过对算法的性能测试可以看出,本文改进粒子群算法在迭代的中后期能够更快地进行局部搜索,并且能够取得比原算法更高的解精度。改进的复杂地况下的雷达布站数学模型可以很好地使雷达布站时避开不可达区域,让事先制定好的布站方案得以顺利实施,具有实际的参考价值。同时仿真结果证明了利用改进的粒子群算法来优化雷达布站数学模型可以取得很好的效果。
[1]Hurley S,Khan M I.Netted Radar:Network Commumications Design and Optimization[J].Ad Hoc Networks,2011,9(5):736-751.
[2]Derham T E,Doughty S,Woodbridge K,et al.Design and E-valuation of A Low-cost Multistatic Netted Radar System[J]. Radar,Sonar&Navigation,2007,5(1):362-368.
[3]吕 悦,张 冰.雷达组网系统责任区抗干扰优化部署[J].火力与指挥控制,2011,36(8):83-86.
[4]Deng H.Orthogonal Netted Radar Systems[J].Aerospace and Electronic Systems Magazine,2012,27(5):28-35.
[5]王中杰,李 侠,周启明,等.多约束条件的雷达组网系统部署决策问题[J].火力与指挥控制,2008,33(12):133-136.
[6]Kusiak A,Wei X,Verma A P,Modeling and Prediction of Rainfall Using Radar Refletivitu Data:A Data-Mining Approach[J].Roz E.Geosciene and Remote Sensing,2013,51(4):2337-2342.
[7]Wang Y,Li B,Wang J Y,et al.Self-adaptive Learning Based Particle Swarm Optimization[J].Information Sciences,2011,181(20),4515-4538.
[8]Chen X,Li Y M.A Modified PSO Structure Resulting in High Exploration Ability With Convergence Guaranteed.Systems[J],Man,and Cybernetics,Part B:Cybernetics,2007,37(5):1271-1289.
[9]Hooshmand R A,Soltani S.Fuzzy Optimal Phase Balancing of Radial and Meshed Distribution Networks Using BF-PSO Algorithm[J].Power Systems,2012,27(1):47-57.
[10]阙渭焰,彭应宁.雷达布站方法[J].清华大学学报,1997,37(4):45-48.
[11]姜建国,田 旻,王向前,等.采用扰动加速因子的自适应粒子群优化算法[J].西安电子科技大学学报,2012,39(4):93-101.
[12]Kennedy J,Eberhart R C.Particle Swarm Optimization[C]//Proceedings of the IEEE Conference on Neural Networks,1995.
Study of Radar Deployment Under Complex Terrain Environment Based on Improved PSO
LIU Yan-ju,HU Yang,YU Yang,SONG Jian-hui
(Shenyang Ligong University,Shenyang 110159,China)
An improved mathematical model of radar optimal deployment is proposed,because the results of using the existing mathematical models optimize radar deployment under complex terrain environment cannot obtain good results.This new mathematical model eliminated the restrictions of radar deployment under complex terrain environment.On this basis,a new optimal algorithm of radar deployment under complex terrain environment is proposed based on particle swarm optimization(PSO)algorithm.The new optimal algorithm improved the existing PSO's performance deficiency for the weak search in the interim of iteration.Simulation results show the feasibility of the improved radar optimal deployment mathematical model,and the effectiveness of the radar deployment method based on improved PSO algorithm under complex terrain environment.
complex terrain environment,radar deployment,mathematical model,PSO
TP391.9
A
1002-0640(2014)09-0164-05
2013-07-20
2013-09-07
刘砚菊(1965- ),辽宁沈阳人,教授,博士。研究方向:智能仪器与控制装置,地面无人车辆智能感知与控制技术、等。