浅谈离心空压机控制系统设计
2014-06-09沈嘉伟
彭 杰,沈嘉伟
(三一能源重工有限公司研究院,上海201200)
浅谈离心空压机控制系统设计
彭 杰,沈嘉伟
(三一能源重工有限公司研究院,上海201200)
针对压缩机运行过程存在运行参数超出设计允许值、用户负荷多变、喘振等问题,设计出一套控制策略和算法,并通过监测机组关键参数、控制放空阀和进口导叶等手段加以实现。阐述了离心空压机控制系统的基本功能和实现方法,给出了具体的控制系统PI简图和功能块图,通过试验验证了该控制系统的优良性能。
离心空压机;控制系统;防喘振;性能控制
1 引言
压缩机控制系统是保证压缩机安全经济运行的最重要手段,即压缩机的“大脑”。当压缩机在运行过程中若出现各种参数超出设计允许时,如轴振、油温、出气温度等,控制系统需要提供相应的保护机组措施。当用户负荷发生变化时,为切实满足用户需要,控制系统通过调节驱动机转速、进口导叶、可调扩压器或放空阀的开度等调整压缩机的出气量和出气压力。而在某些工况范围内,压缩机可能发生喘振,控制系统应能及时检测喘振并预防喘振的发生。
压缩机控制系统主要由控制器、监测仪表、进口导叶、放空阀、辅助油泵、油加热器和接触器、继电器等电气元件共同完成。本文主要介绍控制系统的控制逻辑和控制算法,包括压缩机和辅助电气设备的启停逻辑、压缩机性能调节、防喘振保护、过电流保护、报警联锁保护和故障诊断等。其中启停逻辑主要是对油加热器、辅助油泵和驱动电机的控制,以保证机组在安全条件下启动、运行和停止;性能调节是通过检测管网压力或出口流量来判断并调节驱动转速、进口导叶、可调扩压器或放空阀等改变压缩机运行工况以满足用户恒流量或恒压力的需求;防喘振保护主要是通过检测进气口流量、叶轮进口处压差或电机电流和压缩机出口排气压力等判断压缩机是否将要发生喘振,进而通过动作放空阀(进口导叶等配合动作)来实现防喘振;过电流保护是通过动作进口导叶使电机运行在安全电流以下。报警联锁保护是关键测点的参数超出正常范围时,通过报警和跳车的方式保护机组安全。故障诊断主要是对控制器及输入输出模块、传感器、执行器等控制元器件和程序出现故障时做出应急处理。
2 控制原理
离心压缩机的性能调节方法有进口节流调节、出口节流调节、进气气流旋绕调节、变扩压器叶片角度调节和变转速调节。其中变转速调节是调节范围最大、防喘振经济性应用最好的一种调节方式,但对于由电机拖动的压缩机而言需要昂贵的变频装置。综合考虑到可行性和经济性,采用进气气流旋绕调节方式和放空阀节流分流调节。进气气流旋绕调节方式是在压缩机第一级叶轮进口处安装进口导叶,改变导叶角度使气流旋绕,进而改变一级叶轮的能量头、比功率和压比,从而改变压缩机性能;放空阀节流调节是通过将部分流量放空满足用户小流量需求,但被放空的这部分气体的压缩功被浪费掉了。
喘振是离心压缩机固有的一种不稳定工况现象,气动参数出现周期性的波动,振幅大,频率低,同时排气压力值下降,喘振伴有强烈的气流吼叫声和机体轴承振动。形成喘振的内因是气流的严重失速和扩展,外部条件是压缩机流量小于当前排气压力对应的喘振流量。防止喘振的方法一方面对压缩机本体优化设计扩大稳定工况;另一方面增加专门的防喘振装置。在防喘振装置方面,传统的控制方法根据控制参数不同有单参数控制即定流量控制和双参数控制即变流量限控制。单参数控制规定一个压缩机最小流量,当压缩机流量等于小于规定的最小流量,则打开放空阀防止喘振发生,单参数控制系统简单,但不经济;双参数控制的规定一条喘振线,当工况点越过喘振线则打开放空阀防止喘振发生,该方法相对复杂和经济性较好,但仅适用于喘振线较稳定的情况。最新的防喘振技术是喘振主动控制模式,相对前面讲述的被动喘振控制模式而言,它直接着眼于失稳现象本身,抑制诱发喘振的气流不稳定过程,改善整个压缩机系统性能,阻止喘振的发生,避免了放空带来的不必要能量损失,但这种控制方式尚处在理论和试验研究阶段[1]。综上所述,本项目采用以变流量控制为基础多种控制策略相配合的方式,有效地防止喘振发生,下面将详述这种控制策略。
3 控制策略设计和实现
3.1 控制思路
压缩机性能调节、防喘振保护、过电流保护等所需监测点为进气口流量Qs或喉部压差△p、出口压力px、管网压力pd和电机电流Im,控制量为进口导叶开度Vpi和放空阀开度Vpb,如图1所示。

图1 控制系统PI简图
空压机的控制思路以性能曲线参数说明的方式详细叙述,压缩机性能曲线示意图如图2所示,其参数说明如下:
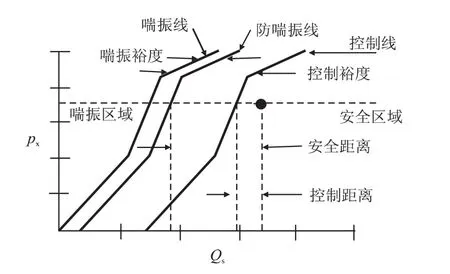
图2 性能曲线示意图
工况点:一般情况采用进气口流量和压比用以表征压缩机工况。对于空气压缩机而言,进气压力几乎不变,一般采用排气压力即可;
喘振线:通过压缩机机组性能试验获取,在进口导叶某一开度下不断提高排气压力使压缩机喘振,喘振前的流量和压力即为喘振点,将不同进口导叶开度的喘振点连成线即为喘振线;
防喘振线:由喘振线的横坐标加上一个安全裕度后得到;当工况点越过喘振线到达左侧(安全距离小于零),则放空阀全开。
控制线:由喘振线的横坐标加上一个控制裕度后得出;当压缩机工作在控制线右侧时,进口导叶调节负荷满足用户需求,当工况点越过控制线到左侧(控制距离小于零)调节放空阀来调节负荷,使压缩机工作在控制线上;
一般来讲,当工况点越过喘振线或防喘振线时放空阀全开;当工况点越过控制线时,此时调节进口导叶和放空阀使工况点维持在控制线上;当工况点在安全工作区域内,调节进口导叶使工况点维持在用户需求压力或流量上。
3.2 控制策略的具体实现
压缩机控制策略的具体实现通过功能块图方式表现,如图3所示(图中未包含启停逻辑、报警联锁保护和故障诊断等功能)。
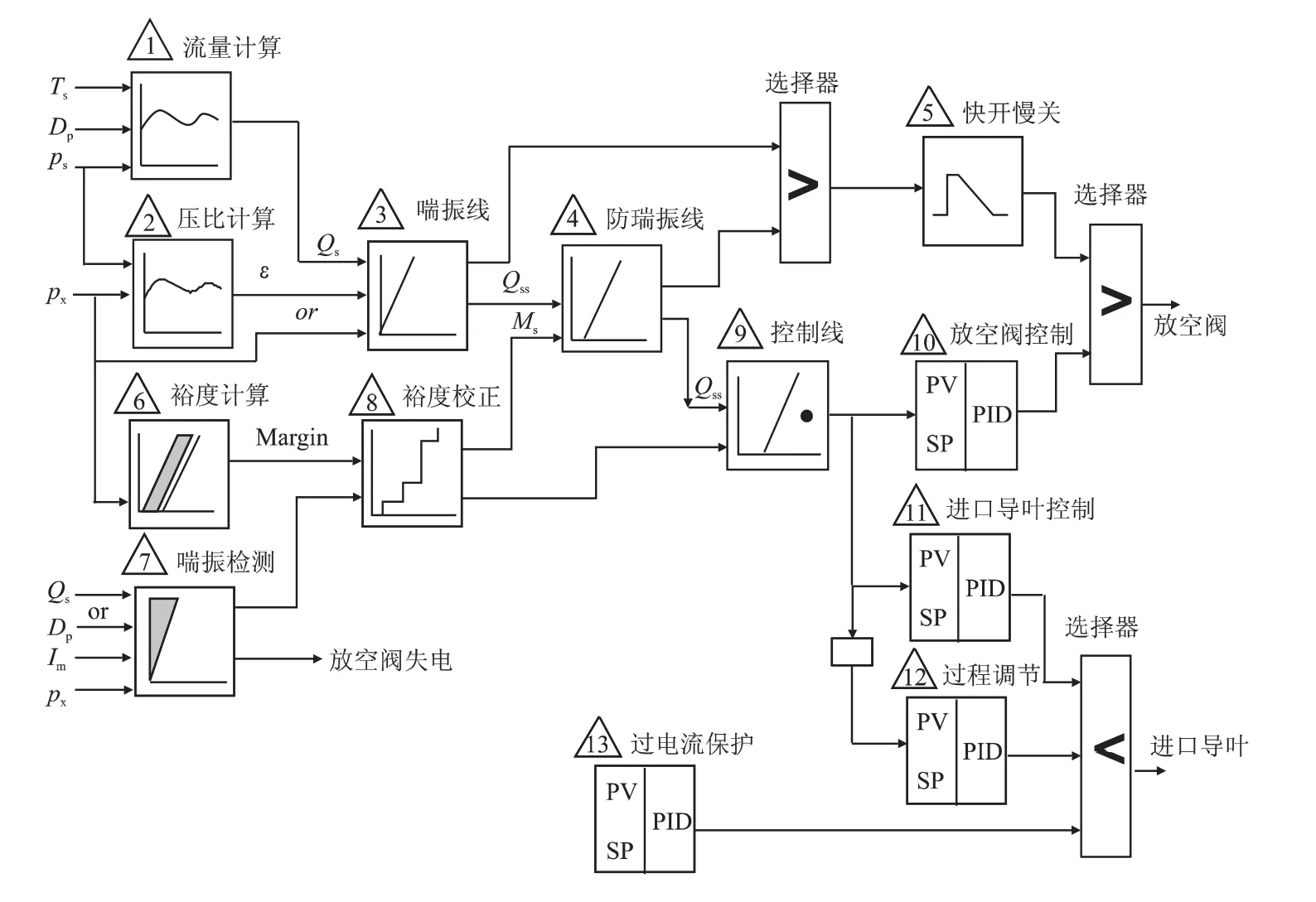
图3 控制功能块图
主要功能块说明:
(1)流量计算功能块:一般用体积流量表征工况,流量计有很多种,不同的流量计有不同的流量计算方法。其中平衡压差流量计的计算公式
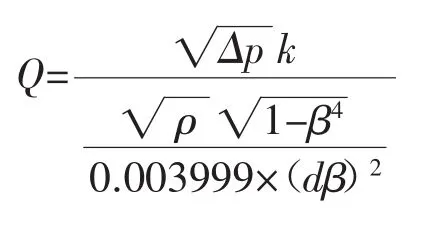
式中 Δp——压差
k——流量常数
β——孔管径比
d——管道内径
ρ——介质工作密度
式中 ρ标——标况密度
T——工作温度,即实际工况的温度
T标——基准温度,即为273.15 K
P标——基准压力,即为101.33 kPa
p——工作压力,即实际工况的压力
d、k、β为已知参数,检测Δp、T和p值代入公式即可得到当前工况的流量。通常为了节省成本不配置专门的流量计,通过检测某段流通部分的压差来表征流量。
(2)压比计算模块:将压缩机出口压力与入口压力都转换为绝对压力后相除,即为压比ε。
式中 px——压缩机出口压力
ps——压缩机进口压力
pabs——绝压转换常数
对于空压机,进口压力的变化量相对出口压力来说比较小,所以可直接用三级出口压力作为性能曲线的纵坐标,输给下一个模块。
(3)喘振线模块:喘振线是通过试验获取的一条曲线,横坐标是能表征负荷容量的参数,如进气口流量、进气口压差、电机电流、功率、压缩能量头等,纵坐标是压比或者出气口压力;根据工况点的压比计算出喘振流量,若工况点流量小于喘振流量认为机组发生喘振,给快开慢关输出使能信号。
(4)防喘振线模块:在喘振流量的基础上加上一个安全裕度,即为防喘振流量,若工况点流量小于防喘振流量认为机组处于不安全区域,给快开慢关模块输出使能信号。
(5)喘振检测模块:当压缩机喘振时部分气动参数如出气压力、流量、喉部压差、电机电流等会发生周期性、频率低和振幅大的波动,控制系统可以根据这些特征判断压缩机是否喘振;如果喘振,给出放空阀全开指令,对于气动执行机构直接使其失控制气源。
(6)裕度计算和校正:裕度分为安全裕度和控制裕度,用于确定防喘振线和控制线。首先通过裕度计算模块计算出裕度初始值,送入喘振校正模块,根据喘振次数对裕度初始值进行补偿,计算出安全裕度和控制裕度;如果裕度过大,放空阀动作过早,导致压缩机能耗增加;如果裕度过小,放空阀动作迟缓可能导致机组喘振;另外进口条件变化、污染阻塞和密封损坏而泄漏都会引起喘振线变化,这就要求喘振线或裕度应有相应的变化,我们通过喘振校正模块实现。若喘振检测模块检测到喘振,而喘振前时刻的工况点仍工作在喘振线右边,则认为喘振线偏左;防喘振模块未能预测出喘振,应将喘振线右移,改动后的喘振线和裕度可手动复位和自动复位。
(7)控制线模块:当工况在控制线的左边时,控制器执行放空阀控制PID,进口导叶的调节由过程调节PID切换到进口导叶控制PID,2个PID控制器协同作用使压缩机工作在控制线上。由于2个PID控制器存在耦合,不方便PID参数整定,可做适当简化,将进口导叶固定在某一开度,只调节放空阀PID,以满足用户小流量的需求。
(8)过电流保护模块:当压缩机负荷过大、负荷突然增大和环境变化都会引起电机电流过大,为保证电机安全运行,我们通过过电流PID限制进口导叶动作,使电机电流在允许范围内。
另外还有信号滤波、功能模块之间的切换过渡、手动自动无扰切换、启动停止等功能不作详述。
4 试验验证
上述控制逻辑和算法在可编程逻辑控制器(PLC)上实现,在SANY GH180-9压缩机上应用,运行效果良好。
(1)恒压调节系统:从图4中可以看出,将管网压力设定在8.5bar时,控制器迅速增大进口导叶开度,管网压力迅速提高到8.5bar并保持稳定,说明进口导叶PID具体一定的跟踪设定值的能力;
从图5中可以看出,将憋压阀开度增大一定值即增大管网流量需求,此时管网压力减小,控制器迅速增大进口导叶开度使流量增大,压力又恢复到9.2bar左右,说明进口导叶PID具有一定的抗干扰能力;
从图6中可以看出,憋压阀在较小开度下,流量需求较小,当减小管网压力设定值,此时控制器进口导叶PID功能块减小进口导叶开度,进口导叶开度减小到下限值管网压力仍无法达到设定值(即提供的流量仍较大),此时放空阀PID功能块打开放空阀分流,使压力降低到设定值;同样,当增大管网压力设定值时,放空阀PID功能块先关闭放空阀增大流量从而增大管网压力,若完全关闭仍无法满足需求,则进口导叶PID功能块增大进口导叶开度,使管网压力达到设定值(从图6中可以看出,该控制系统可以满足用户小流量需求)。
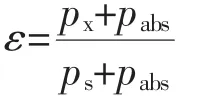
(2)从图7中可以看出,当憋压阀迅速关小,此时管网压力迅速增大,此时进口导叶PID功能块迅速关小进口导叶到最小开度,而压缩机工况仍越过防喘振线,此时防喘振线控制模块迅速打开放空阀,然后进口导叶关闭,进入空载状态,成功实现防喘振。
5 结语
该系统通过试验验证,能使机组安全平稳启动、运行和停止,提供的恒压调节系统可将排气压力稳定在给定值±0.1bar范围内,提供的防喘振系统可保证机组安全运行。同时我们也注意到这套系统也有很多需要改进的地方:
(1)各功能块(如喘振线校正等)、功能块间的切换等需要更精细化;
(2)系统故障处理能力需要更全面的考虑,当控制器输入输出模块、仪表发生故障和程序漏动等,需要控制器做出准确判断和合理动作;
(3)需要更多对用户不合理操作的限制保护,如在启动或运行中不响应启动按钮命令、运行中对油加热器和辅助油泵等启停命令、报警联锁设定值上下限、手动阀门开度设定值上下限等。
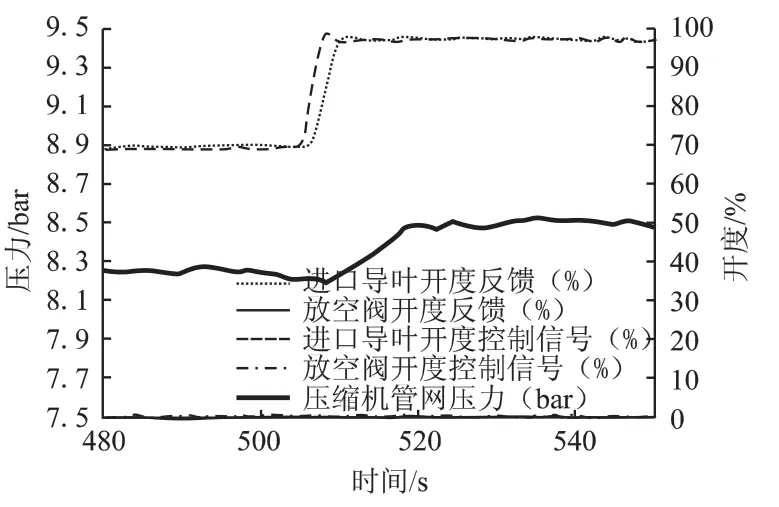
图4 管网压力设定值改变时进口导叶PID调节过程
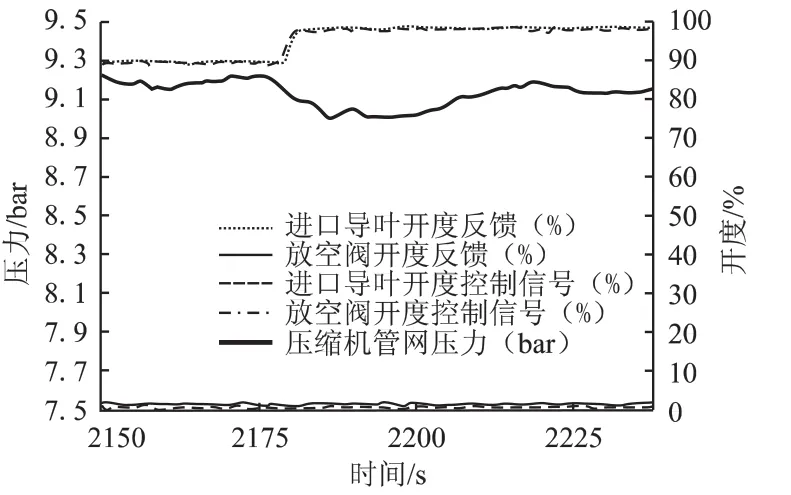
图5 管网负荷改变时进口导叶PID调节过程

图7 接近喘振时进口导叶和放空阀调节过程
[1]黄钟岳,王晓放.透平式压缩机[M].北京:北京化学工业出版社,2004,8:236-245.
[2]王晓亮.防喘振功能在透平式压缩机控制中的应用[J].自动化应用,2012,(02):23-25.
Discussion on Design of Centrifugal Air Compressor Control System
PENG Jie,SHEN Jia-wei
(SANY ENERGY R&D Institute,Shanghai 201200,China)
To tackle such problems as the operating parameters exceeding the design allowances,user load variations and surge,etc during compressor operations,a set of control strategy and algorithm has been successfully designed and realized by the means of monitoring machine key parameters,controlling blow-off valves and IGV,etc.In the paper,the basic functions and design methods of centrifugal air compressor control system has been illustrated,the detailed P&I diagrams and the function block diagrams has been drawn up,and the excellent performance of the control system has been tested.
centrifugal air compressor;control system;anti-surge;performance control
TH452
B
1006-2971(2014)01-0029-05
彭杰(1986-),男,湖北荆门,电气工程师,硕士,主要从事压缩机控制系统设计和试验数据采集系统设计。E-mail: pengjiepj@126.com
2013-09-13