基于飞轮储能系统的直流UPS控制方法研究
2014-06-08刘文军唐西胜周龙齐智平
刘文军,唐西胜,周龙,齐智平
(中国科学院电工研究所,北京100190)
基于飞轮储能系统的直流UPS控制方法研究
刘文军,唐西胜,周龙,齐智平
(中国科学院电工研究所,北京100190)
飞轮储能系统将能量以机械能的形式储存在高速旋转的飞轮转子中。与传统化学电池相比,飞轮储能系统优势明显,已获得了广泛的应用。为了解决电网电压对称跌落所带来的直流负载端电压暂降问题,给出了基于飞轮储能系统的直流UPS系统电路拓扑及控制方法。在电网电压正常时,飞轮电机采用速度外环、电流内环的双闭环控制策略加速充电或恒速待机;在电网电压发生对称跌落时,飞轮电机采用电压外环、电流内环的双闭环控制策略减速放电。提出了电流内环控制器的零极点对消降阶设计方案,采用对称优化函数等效法设计了速度外环及电压外环控制器参数,并对设计的控制器进行了稳定性分析。通过Matlab/Simulink仿真对该控制方法进行了验证。结果表明,该控制方法及所设计的控制器参数能准确控制飞轮电机运行模式,稳定直流负载端电压,保护直流负载不受电网电压跌落的影响。
飞轮储能系统;直流不间断电源;充放电控制;永磁同步电机
1 引言
随着电力系统中的非线性和冲击性负荷越来越多,电网中诸如电压跌落、骤升、闪变和谐波等电能质量问题越来越严重[1]。根据各国学者和电力部门统计,在这些电能质量问题当中,发生频率最高、造成经济损失最严重的一类电能质量问题是电压跌落问题[2],即电网电压有效值降至额定值的10%~90%,跌落持续时间一般为0.002~2s,其中80%的电压跌落仅持续20~50ms[1]。而在电力系统中,存在大量对电能质量要求高的用户,例如通信系统、用于银行的计算机系统、精密医疗设备、半导体制造业等。当电网出现电压跌落问题时,为保证用户不受影响,各种不间断电源(Uninterruptible Power System,UPS)被广泛使用[3-6]。
UPS按其输出形式可分为交流UPS和直流UPS,交流UPS需要逆变器将储能设备直流输出电压逆变为交流电输出,直流UPS则可直接供给直流负载,不需要再经过逆变[7]。飞轮储能由于具有无环境污染、使用寿命长、运行温度范围广、充放电次数无限制等特点,已在不间断电源这个领域获得了广泛的应用[4,8,9]。文献[10,11]设计并实现了基于飞轮储能技术的新型UPS系统,提出了高速飞轮充、放电方式的控制策略,但其飞轮电机采用的是永磁无刷直流电机,且未给出充放电控制器参数设计方法。文献[12-15]研究了永磁同步伺服系统电流环的设计方法,但在电流环的设计中忽略电机反电动势,该设计方法主要适用于低速场合。
本文针对电压对称跌落所带来的直流负载端电压暂降问题,首先给出了基于飞轮储能系统的直流UPS系统电路拓扑及系统数学模型。然后给出了系统控制方法,在电网电压正常时采用速度外环、电流内环的双闭环策略控制飞轮电机加速充电或恒速待机,在电网电压发生对称跌落时采用电压外环、电流内环的双闭环策略控制飞轮电机减速放电。接着分别对电流内环、速度外环、电压外环控制器进行了参数设计和稳定性分析。最后采用Matlab/Simulink对该控制方法进行了仿真验证。
2 主电路拓扑及系统数学模型
2.1 主电路拓扑
基于飞轮储能系统的直流UPS电路拓扑结构如图1所示。飞轮储能直流UPS由三相不控整流桥(在对直流母线电压精度要求很高的场合亦可考虑采用PWM整流桥)、双向变流器、永磁同步电机和飞轮转子等组成。

图1 基于飞轮储能系统的直流UPS主电路拓扑Fig.1Topology of FESS based DC UPS
图1中飞轮储能系统的功率可按直流负载最大功率需求PLmax进行设计,系统储能量可根据PLmax和负载持续时间T的乘积进行设计;系统转速运行上下限可根据电机额定转速和放电深度进行确定,同时转速运行上下限还应满足J(ωmax2-ωmin
2)η/2= PLmaxT,其中J为飞轮转子的转动惯量,η为能量转换效率。
2.2 系统数学模型
在dq坐标系下,飞轮储能系统中永磁同步电机的电压电流关系式为:

式中,ud、uq分别为定子电压直轴和交轴分量;Rs为定子电阻;id、iq为直轴和交轴电枢电流;Ld、Lq为直轴和交轴电感;ωe为电机电气角速度;ψf为转子励磁磁链。
永磁同步电机直轴和交轴等效电路图分别如图2(a)、图2(b)所示。
采用直轴电枢电流id为0的控制策略时,交轴电压电流关系式可写为:

电机转矩平衡方程为:

图2 永磁同步电机等效电路图Fig.2Equivalent circuit of PMSM

电磁转矩为:

将式(4)代入式(3),可得:

式中,Kt=3p2ψf/2;J为转动惯量;B为粘滞摩擦系数;p为极对数;Te为电磁转矩。
3 直流UPS控制方法
飞轮储能直流UPS的基本工作原理是,当电网电压正常时,由电网供电,电网经三相不控整流桥整流为直流,直接向直流负载供电。同时,整流桥输出的直流电经双向变流器逆变为交流电后驱动飞轮电机,飞轮电机采用速度外环、电流内环的双闭环控制策略加速充电或恒速待机。一旦电网电压发生对称跌落,飞轮电机立即启用电压外环、电流内环的双闭环控制策略减速放电,以此将直流母线电压维持在电网电压正常时的水平。因此从直流负载侧看,供电不受电网电压对称跌落的影响。
直流UPS控制框图如图3所示。当电网电压正常时,电网电压锁相环输出直轴电压ugd不满足小于90%额定相电压峰值Um的条件,此时控制模式切换标志S=0,飞轮电机采用速度外环、电流内环的策略充电或待机;当电网电压对称跌落到90%以下时,锁相环输出直轴电压ugd满足小于90%Um的条件,此时S=1,飞轮电机采用电压外环、电流内环的策略放电,将直流母线电压稳定在电网电压对称跌落前的水平。
4 控制器参数设计与稳定性分析
4.1 电流内环控制器参数设计与稳定性分析
根据式(2)、式(5)可推出q轴电流控制器的结构图如图4所示。

图3 直流UPS控制框图Fig.3Control block diagram of DC UPS

图4 q轴电流环结构图Fig.4Block diagram of current loop in q-axis
由图4可见,在电流环结构图中考虑了电机反电动势。由该电流环结构图可推出q轴电流环精确闭环传递函数为:

式中

在带宽频率处,下列近似条件成立:

式中
可见经过化简,q轴电流环可从式(6)所示的四阶系统降为式(9)所示的一阶系统。由于一阶系统的调节时间

故可根据系统所要求的电流环调节时间ts按式(13)确定Ti,再根据Ti按式(12)确定Kci,然后根据式(8)将Kci乘以T1即可确定Kcp。
由一阶简化电流闭环传递函数式(9)可得,电流内环控制系统特征方程为1+sTi=0,其根为负数,因此可知所设计的电流内环控制系统稳定。
4.2 速度外环控制器参数设计与稳定性分析
速度外环控制器的结构图如图5所示。

图5 速度外环结构图Fig.5Block diagram of outer speed loop
速度闭环传递函数为:

在带宽频率处,下列近似条件成立:

式中,Tωi=Tω+Ti。
这样式(14)可简化为:

式中

将速度闭环传递函数式(15)等效为如式(17)所示的阻尼比为0.707的对称优化函数。
比较式(15)及式(17)可得:

由速度闭环传递函数式(17)可得,速度环控制系统的特征方程为:

列出劳斯表,可得劳斯表的第一列元素分别为Ts
3/16、3Ts
2/8、5Ts/6及1。由于Ts=6Tωi>0,因此劳斯表的第一列元素均大于0,根据劳斯稳定判据可知所设计的速度环控制系统稳定。
4.3 电压外环控制器参数设计与稳定性分析
电压外环控制器的结构图如图6所示。

图6 电压外环结构图Fig.6Block diagram of outer voltage loop
电压闭环传递函数为:

式中

将电压闭环传递函数式(20)等效为如式(22)所示的阻尼比为0.707的对称优化函数。

比较式(20)及式(22)可得:
同速度环控制系统的稳定性判定过程一样,可知所设计的电压环控制系统稳定。
5 仿真分析
利用Matlab/Simulink对直流UPS控制方法进行仿真,仿真模型如图7所示。仿真中,电网的额定线电压380V/50Hz,直流负载功率为3kW,直流母线电容为2200μF,双向变流器开关频率为6kHz,永磁同步电机仿真参数如表1所示。

表1 永磁同步电机仿真参数Tab.1Simulation parameters of PMSM
仿真中,控制器参数根据文中第4节参数设计方案计算得出(限于篇幅,具体计算过程从略),如表2所示。

图7 直流UPS仿真模型Fig.7Simulation model of DC UPS

表2 控制器参数Tab.2Controller parameters
电网相电压(a相)波形如图8所示,电网电压锁相环输出直轴电压波形如图9所示。

图8 电网相电压Fig.8Phase voltage of power grid

图9 锁相环输出直轴电压Fig.9D-axis voltage of phase lock loop
由图8可见,电网电压在0~52s期间正常,52~54s期间电压对称跌落为50%,54~58s期间电压恢复正常。由图9可见,在0~52s、54~56s电网电压正常期间,锁相环输出直轴电压ugd为额定相电压峰值,在52~54s电压对称跌落为50%期间,ugd也迅速降为额定相电压峰值的50%。
控制模式切换标志S如图10所示。由图10可见,在电网电压正常时,S=0;在电网电压对称跌落为50%时,S=1。
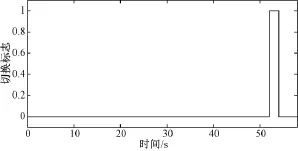
图10 控制模式切换标志Fig.10Control mode switch flag
飞轮转速如图11所示。由图11可见,在0~52s电网电压正常期间,飞轮电机从0s时刻开始起动,在43.8s时刻加速至额定转速5000rpm后,进入恒速待机状态;在52~54s电压对称跌落为50%期间,飞轮电机处于减速放电状态;在54~58s电压恢复正常期间,飞轮电机加速充电至额定转速后进入待机状态。
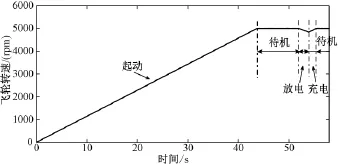
图11 飞轮转速Fig.11Flywheel speed
直流母线电压如图12所示。由图12可见,在52~54s电网电压跌落为50%期间,飞轮电机能够将直流母线电压维持在电网电压发生跌落前的水平,从而保护直流负载不受电网电压跌落的影响。

图12 直流母线电压Fig.12DC bus voltage
6 结论
为了解决电网电压对称跌落所带来的直流负载端电压暂降问题,本文给出了基于飞轮储能系统的直流UPS系统电路拓扑及控制方法。在电网电压正常时,飞轮电机采用速度外环、电流内环的双闭环控制策略加速充电或恒速待机;在电网电压发生对称跌落时,飞轮电机采用电压外环、电流内环的双闭环控制策略减速放电。采用零极点对消降阶法设计了电流内环控制器参数,采用对称优化函数等效法设计了速度外环及电压外环控制器参数,并对设计的控制器进行了稳定性分析。通过Matlab仿真对该控制方法进行了验证。结果表明,该控制方法及所设计的控制器参数能准确控制飞轮电机运行模式,稳定直流负载端电压,保护直流负载不受电网电压跌落的影响。
[1]周龙,齐智平(Zhou Long,Qi Zhiping).解决配电网电压暂降问题的飞轮储能单元建模与仿真(Modeling and simulation of flywheel energy storage unit for voltage sag in distribution network)[J].电网技术(Power System Technology),2009,33(19):152-158.
[2]朱俊星,姜新建,黄立培(Zhu Junxing,Jiang Xinjian,Huang Lipei).飞轮储能动态电压恢复器的拓扑结构和充电策略(Topologies and charging strategies of the dynamic voltage restorer with flywheel energy storage)[J].电机与控制学报(Electric Machines and Control),2009,13(3):317-321.
[3]Gurrero J M,De Vicuna L G,Uceda J.Uninterruptible power supply systems provide protection[J].IEEE Industrial Electronics Magazine,2007,1(1):28-38.
[4]Roberts B,Mcdowall J.Commercial successes in power storage[J].IEEE Power and Energy Magazine,2005,3 (2):24-30.
[5]Long Zhou,Zhiping Qi.Modeling and control of a flywheel energy storage system for uninterruptible power supply[A].International Conference on Sustainable Power Generation and Supply[C].Nanjing,China,2009.
[6]汪孟,刘亚东,蒋志宏,等(Wang Meng,Liu Yadong,Jiang Zhihong,et al.).双变换UPS中PWM整流器的二次谐波补偿和电容电压分时控制(Second-harmonic compensation method and capacitor-voltage time-sharing control scheme for a double conversion UPS rectifier)[J].电工电能新技术(Advanced Technology of Electrical Engineering and Energy),2006,25(2):29-33.
[7]刘强,杨昉昉(Liu Qiang,Yang Fangfang).矿用直流不间断电源的设计(Design of mine-used DC UPS)[J].工矿自动化(Industry and Mine Automation),2011,(8):130-133.
[8]Pena-Alzola R,Sebastian R,Quesada J,et al.Review of flywheel based energy storage systems[A].2011 International Conference on Power Engineering,Energy and E-lectrical Drives(POWERENG)[C].Malaga,Spain,2011.
[9]Daoud M I,Abdel-Khalik A S,Massoud A,et al.On the development of flywheel storage systems for power system applications:A survey[A].2012 International Conference on Electrical Machines(ICEM)[C].Marseille,France,2012.
[10]陈峻岭,姜新建,朱东起,等(Chen Junling,Jiang Xinjian,Zhu Dongqi,et al.).基于飞轮储能技术的新型UPS的研究(UPS using flywheel energy storage)[J].清华大学学报(自然科学版)(Journal of Tsinghua University(Science&Technology)),2004,44 (10):1321-1324.
[11]Chen J,Jiang X,Zhu D,et al.A novel uninterruptible power supply using flywheel energy storage unit[A].The 4th International Power Electronics and Motion Control Conference,2004[C].Xi’an,China,2004.
[12]陈荣,邓智泉,严仰光(Chen Rong,Deng Zhiquan,Yan Yangguang).永磁同步伺服系统电流环的设计(Design of current control loop for permanent magnet synchronous servo system)[J].南京航空航天大学学报(Journal of Nanjing University of Aeronautics&Astronau-tics),2004,36(2):220-225.
[13]敖然,肖岚,朱德明,等(Ao Ran,Xiao Lan,Zhu Deming,et al.).永磁同步电机伺服系统电流环的研究(Research on electric current loop for PMSM servo system)[J].电力电子技术(Power Electronics),2008,42(1):57-59.
[14]刘军,敖然,韩海云,等(Liu Jun,Ao Ran,Han Haiyun,et al.).永磁同步电动机伺服系统电流环优化设计(Optimizing design of current loop for permanent magnet synchronous servo system)[J].微特电机(Small&Special Electrical Machines),2012,40(6): 17-19.
[15]朱广斌,孟小利,严仰光(Zhu Guangbin,Meng Xiaoli,Yan Yangguang).基于DSP的永磁同步电动机伺服系统速度环研究(Design of speed control loop for PMSM AC servo system based on DSP)[J].微电机(Micromotors),2008,41(2):53-55.
Research on control method of FESS based DC UPS
LIU Wen-jun,TANG Xi-sheng,ZHOU Long,QI Zhi-ping
(Institute of Electrical Engineering,Chinese Academy of Sciences,Beijing 100190,China)
Flywheel energy storage system(FESS),which stores energy in a rotating mass,is a kind of mechanical energy storage system.FESS is now considered a promising technology for many applications due to its significant advantages versus batteries.In order to solve the voltage sag problem of DC load introduced by the grid voltage symmetric falling,this paper first presents the topology and control method of FESS based DC UPS.When the grid voltage is normal,the strategy based on an outer speed loop cascaded with an inner current loop is used.When the grid voltage falls symmetrically,the strategy based on an external DC-bus voltage loop cascaded with an internal current loop is used.Then a zero-pole offset order-reduction design method for inner current loop is proposed,while the control parameters of outer speed and outer DC-bus voltage loops are designed through using the symmetric optimum function equivalency method.And the stabilities of designed controllers are analyzed.This control method is verified by simulation in Matlab/Simulink.The simulation results indicate that this control method and the designed controller parameters can control the flywheel motor’s operation mode accurately,stabilize the DC load voltage and make voltage-sensitive DC load not affected by grid power interruption.
Flywheel Energy Storage System(FESS);DC uninterruptable power supply(DC UPS);charge and discharge control;permanent magnet synchronous motor(PMSM)
TK02;TM91
A
1003-3076(2014)10-0016-07
2013-10-10
国家高技术研究发展计划(863)(2011AA05A113)、国家自然科学基金(51207156)、中科院知识创新工程重要方向(KGCX2-EW-330)资助项目
刘文军(1986-),男,湖北籍,博士研究生,主要从事微型电网及飞轮储能技术研究;齐智平(1958-),女,北京籍,研究员/博导,主要从事微网和智能电网的研究。
