自适应滤波技术在车辆变速箱故障诊断中的应用
2014-06-05唐雪松
曹 文 ,唐雪松 ,张 盟
(1.装甲兵技术学院车辆工程系两栖空降装备教研室,长春 130117;2.装甲兵技术学院车辆系,长春 130117)
1 自适应滤波原理
信号的统计性能会随着系统与环境的变化而变化,与设定好的条件发生偏离,因此需要在设计中将滤波器的参数设置为自适应系统与环境的变化,实现自动跟踪也即所谓的自适应滤波器。自适应滤波分为IIR与FIR两种,FIR使用频率更高,其运行原理方块图如图1所示:

图1 自适应滤波原理图
2 如何建立自适应神经滤波器
2.1 自适应噪声抵消原理探究
图2即为适应噪声消除系统的方块图。其中A路指有用信号中s混合噪声no的信号,A、s、no之间的关系为:y=s+no,B路指自适应滤波器参数(噪声n1)的录入,此时x=n1。假定s与no或n1互不关联,但no与nl存在特定关系,而且所有参数均为零均值平稳随机过程,此时,系统的输出误差信号为:e=y-?=s+no-?。?为利用自适应滤波器估算而来的噪声n1,为降低两者之间的误差值,设定在理想状态下,该自适应滤波器可以抵消系统中的所有噪声,剩下的信号即为所需信号。
此信号为:E[e2]=E[s+(no-y')2]=E[e2]+E[(no-y')2]。当系统均方差数值最小时,y'=no,此时系统输出e=s,即未被干扰的初始信号s和系统输出信号e数值相近。
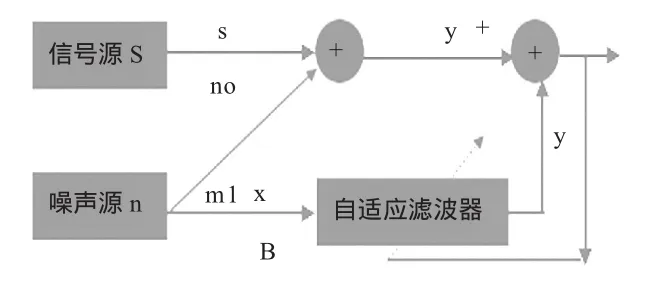
图2 自适应噪声消除系统原理图
2.2 adaline自适应滤波器模型
此滤波器模型将一个抽头延迟线模块和adaline网络连接而成。滤波器模型的信号通过左边输入,其输出端为R维向量P。
1960年w idrow和hoff提出了自适应线性神经元模型,此模型是一种利用LMS算法加以管理的自适应模式分类器。其运用理论权值调整规则为:

其中,输入向量为x(k),权值向量为w(k),神经元的学习速率为μ。
3 应用实例分析
3.1 实验及数据采集
该实验选取了某型发动机转速为600r/m in的装甲车,并将三档被动齿轮作为该实验的研究项目。首先,测试在正常状态下的变速箱体的振动加速信号。其次,将断齿齿轮换上,测试在断齿故障下的变速器的振动加速度信号。并在实验中对发动机机体的振动信号进行测量收集,用专门的信号对变速箱振动信号完成自适应滤波。
得到表1变速箱体振动信号幅值特征统计表。当齿轮出现故障,其幅值表现出上升趋势,尤其以最大值和脉冲指标数据上升最为明显,也说明了该信号中含有的脉冲成本较多。

表1 变速箱体振动信号幅值特征统计表
3.2 变速箱振动信号的频率探究
3.2.1 自适应滤波及自功率谱分析
在正常情况下,其振动信号能量介于500~2 500Hz,中心频率大约为1 300Hz。但当发生断齿故障后,其频带区域会增宽,尤其是在频率最低值时频带增幅最为明显。
3.2.2 断齿时振动信号的调幅分析
无论齿轮发生何种故障,在实验运行中通常表现为传动误差问题。实际运行的齿廓形状和角位置与理论形状和角位置出现了偏差,此差值数构成了齿轮振动和噪声的主要来源。
4 结语
变速箱内齿轮断齿是装甲车常见故障之一,可以通过变速箱体发出的振动加速信号的变化予以察觉。此外,通过对振动信号进行包络谱分析,能够有效诊断出变速箱齿轮断齿下的频率特性,并依据频率特性确定具体出现故障的部位,进而加以维修。
[1][加]赫金.自适应滤波器原理(第四版)[M].郑宝玉,译.北京:电子工业出版社,2010.
[2]孙德福.装甲车辆复杂系统故障诊断方法[M].北京:国防工业出版社,2009.