一种感应电机磁链观测器的稳定性研究及改进
2014-06-01胡清王凯
胡清,王凯
(1.商丘职业技术学院机电工程系,河南商丘476000; 2.浙江大学电气工程学院,浙江杭州310027)
一种感应电机磁链观测器的稳定性研究及改进
胡清1,王凯2
(1.商丘职业技术学院机电工程系,河南商丘476000; 2.浙江大学电气工程学院,浙江杭州310027)
基于电压电流模型的闭环磁链观测器在无速度传感器感应电机矢量控制中获得了良好的控制性能,且具有较小的参数敏感性,但在低速发电模式下存在部分不稳定区域,导致电机在该区域不能正常运行。根据对该闭环磁链观测器稳定性分析及其对应不稳定区域条件,本文提出了一种改进方法使之能够在在低速发电模式下稳定运行。仿真和实验都证明了该改进方法的有效性和实用性。
感应电机;闭环磁链观测器;无速度传感器;稳定性分析;低速发电模式
1 引言
长期以来,异步电机矢量控制技术因实现了电机磁链和电磁转矩的独立控制,达到直流电机调速的性能[1,2]而受到广泛关注和研究;此外无速度传感器矢量控制的发展进一步降低了异步电机驱动器的成本,并且提升了其在高速下的性能;再加上异步电机本身价格低廉、可靠性高、易于维护制造等优点,使得异步电机越来越多地应用于高性能场合,如近年来高速发展的电动汽车技术。目前在电动汽车驱动系统尤其是大功率应用场合中无速度传感器矢量控制异步电机驱动器占据重要地位[3]。
无速度传感器异步电机控制的关键技术在于磁链幅值和磁链方向的准确观测,所以磁链观测器对整个控制系统至关重要。异步电机磁链观测器主要分为全阶磁链观测器和降阶磁链观测器(包括电压模型、电流模型以及电压电流相结合的模型)。纯积分问题以及定子电阻偏移使得电压模型磁链观测器的使用受到限制,必须采用其他方法来回避或解决这个问题[4]。基于扩展卡尔曼滤波器(Extended Kalman Filter,EKF)的方法[5]可以获得较准确的估算信息,但是这种方法通过微处理器实现运算量较大,而且受噪声影响。此外,滑模观测器[6,7]可以减小系统扰动和参数误差对观测器的影响,全阶观测器[8]通过设计反馈矩阵来灵活配置观测器的极点,可以较好地实现磁链估算,但是上述两种观测器在低速发电模式下存在难以消除的不稳定区域。文献[9]在文献[6]的基础上,提出了一种利用电压电流相结合的模型来获得转子磁链的方法,该方法利用静止坐标系下的电压模型输出获得转子磁链角度,从而简化了旋转坐标系下的电流模型,消除了该观测器对转子侧参数的依赖;反过来,电流模型的输出作为电压模型的补偿量,消除了电压模型中的纯积分问题,实现了无速度传感器控制下的准确磁链估算。但是该方法仍然存在低速发电模式下的不稳定区域。文献[4]在文献[9]的基础上提出了一种方法消除该不稳定区域,其代价是增加了转差计算,由于转差计算依赖于转子侧参数的准确性,故文献[4]的方法大大增加了该观测器的参数敏感性。
本文在文献[4,9]的基础上研究了电压电流模型闭环磁链观测器的稳定性,并提出了一种不依赖于转差计算的解决方案,使得该观测器在保留了对参数敏感性低的优点的同时,实现了低速发电下的稳定运行。
2 闭环电压电流模型磁链观测器
基于电压电流模型的闭环磁链观测器[4,9]结构如图1所示,在低速下,电流模型观测值在最终观测值中起主导作用;在高速时,电压模型观测值在最终观测值中起主导作用,中间通过过渡环节G(s)过渡。
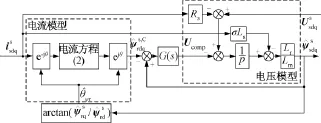
图1 闭环电压电流模型磁链观测器Fig.1Voltage and current model based close-loop flux observer
感应电机电压方程和电流方程可以表示为:

根据文献[4],本文中的关系式采用复数矢量形式,其表达形式为:fdq=fd+jfq和fαβ=fα+jfβ。式中,上标s、e分别表示定子坐标系的分量和转子磁链定向坐标系下的分量;上标C表示电流模型;V表示电压模型;下标s、r分别表示定子、转子分量;p为微分算子;^标记表示估算值。Us为定子电压;is为定子电流;ψr为转子磁链;Rs、Rr、Lm、Ls和Lr分别为定子电阻、转子电阻、励磁电感、定子电感和转子电感;ωs为转差角频率;σ为漏感系数;Tr为转子时间常数,其中,σ=1-L2m/(LsLr),Tr=Lr/Rr。在转子磁场定向系统中,=0,则电流方程为:

根据式(1)和式(2),观测器模型可以表示为:

式中,Ucomp为补偿量;G(s)为补偿器;分别为开环电流电压模型的磁链。
3 闭环磁链观测器稳定性分析
根据文献[4]的小信号分析,如果补偿器G(s)设定为比例反馈系数ki,由Routh-Hurwitz判据,其状态方程对应的特征方程需要满足稳定性条件如下:


式中,ωr为转子电气角频率;k'i=kiLr/Lm。
式(5)决定的稳定性条件较弱,为消除式(5)带来的不稳定,只需满足:

式中,ωsm为最大转差角频率,对应于最大负载转矩Tem。闭环磁链观测器稳定性分析示意图如图2所示。式(6)决定的稳定性条件较强,无论k'i取值多少(为消除电压模型的纯积分问题,k'i不能为零),图2中阴影部分所示观测器的不稳定区域始终存在,且k'i越大,该不稳定区域越大。文献[4]提出了一种方法来改善该观测器的稳定性,但由于增加了转差计算,而转差计算依赖于转子侧参数的准确性,故文献[4]的方法失去了该观测器固有的对参数敏感性低的优点。
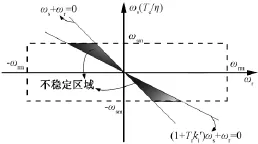
图2 闭环磁链观测器稳定性分析Fig.2Stability analysis of closed-loop flux observer
4 闭环磁链观测器稳定性能改进
由于异步电机是一个高阶多变量耦合系统,在磁链估算中,静止坐标系下的dq轴磁链存着互相耦合的关系,如果单纯设定G(s)=ki,将使得该反馈不能很好地反映磁链估算值之间的耦合关系,从而导致在某些发电区域的不稳定现象。现在考虑如果增加一个dq轴之间的交叉反馈系数kj,使得静止坐标系下的dq轴磁链估算分别得到来自另一个轴的反馈信息,则有可能改善整体磁链观测器的稳定性。为了验证该想法的合理性,参照文献[4]的方法,其稳定性理论分析如下:
令

重新计算磁链观测器状态方程对应的特征方程为:
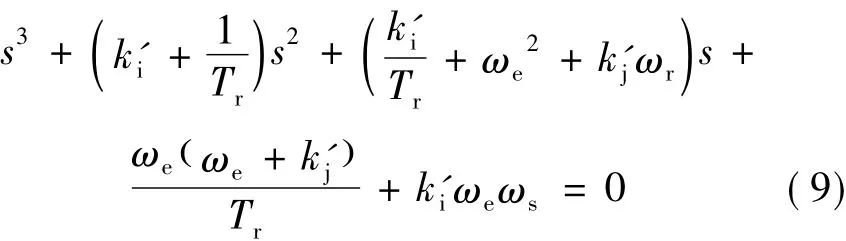
由Routh-Hurwitz判据,得到稳定性满足条件如下:
式中,k'i=kiLr/Lm;k'j=kjLr/Lm。式(10)和式(12)决定的稳定性条件较弱,然而,式(11)决定的稳定性条件较强。实际上式(11)仅仅比式(6)多了一项可变系数k'j,正是通过对k'j的调节使得观测器的稳定范围得到改善。闭环磁链观测器稳定性改进示意图如图3所示,如果让直线ωs+ωr=ωcj穿过点(ωsm,-ωsm),其中ωcj=-k'j-k'iTrωs,那么该观测器的不稳定区域就被减小至ωsm速度范围以下的区域。此时,k'j的取值由下式决定:

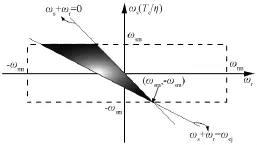
图3 闭环磁链观测器稳定性改进Fig.3Stability improvements of closed-loop flux observer
另一方面,考虑到式(10)和式(12)决定的稳定性条件,首先根据式(10)得到:

把式(13)代入式(14),得到:

其次,根据式(12):

把式(13)代入式(16),且k'i>0,得到:

由以上分析知,要满足式(10)和式(12),只需满足式(15)和式(17),当0≤k'iTr≤4时,式(15)显然成立,且只要k'i足够小,总能使得式(17)成立。
5 仿真结果
该结果建立在基于Matlab/Simulink的仿真模型上,电机基本参数设定为:额定线电压380V,额定频率50Hz,极对数np=2,定转子电阻Rs=2.9Ω,Rr=2.6Ω;定转子电感为Ls=Lr=0.276H。磁链给定幅值为0.9Wb,额定转矩为14N·m,故对应最大转差为22.35rad/s(3.5Hz)。该仿真实验以正向电动模式为例,首先验证时的磁链估算值。为了满足稳定性条件,令k'i=4/Tr,即k'i= 37.49;令k'j=-k'iTrωsm,即k'j=-89.81。一开始令电机工作在电动模式下的75rpm(对应电气角频率为5Hz)、14 N·m。在1.5s时突然施加反方向的负载转矩-14 N·m,令其进入发电模式,此时观察当k'j=-89.81和k'j=0情况下,d-q旋转坐标系下的磁链估算结果,如图4(a)和图4(b)所示。其结果证明,在转速(5Hz)比转差(3.5Hz)大的情况下,交叉耦合反馈系数k'j改善了磁链估算发散的情况,使得电机能够稳定运行。为进一步验证时的磁链估算情况,令k'i值不变,k'j=0,速度给定设置为30rpm(对应电气角频率为2Hz),转矩仍为14N·m跳变至-14N·m,此时磁链估算情况如图4(c)所示。仿真结果显示,此时不增加交叉耦合反馈系数,电机仍能保持磁链估算的准确。
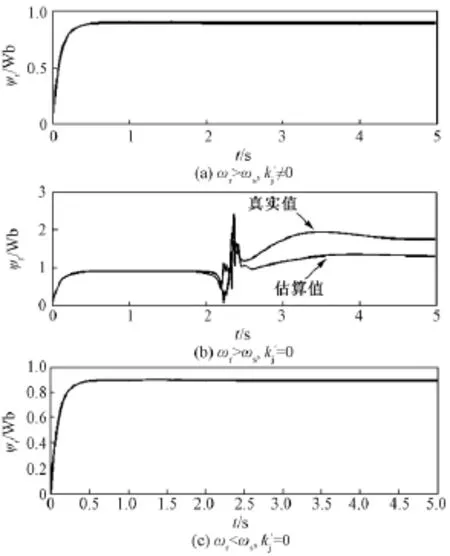
图4 磁链估算仿真结果Fig.4Simulation results of flux estimations
6 实验结果
该实验平台包括:一台2.2kW/50Hz/2对极的三相异步电机;一台直流电机作为负载;一块包含电压电流传感器的逆变器功率板;一个数字信号处理器(DSP)(TMS320 F28335)和一台用于连接DSP仿真器进行控制并获取数据的PC。系统采样和开关频率都是10kHz。该电机铭牌标注的额定线电压为UN=380V;额定电流为IN=5.16A。该电机实际测定基本参数与仿真设置基本一致,分别为Rs= 2.9Ω,Rr=2.6Ω;定转子电感为Ls=Lr=0.276H;定转子漏感为Lsσ=Lrσ=0.01H。实际工作中设定转子磁链给定值为0.9Wb;额定转矩为14N·m。
为了验证该方案的有效性并和仿真实验作比较,该实验过程如下:让电机运行在75rpm的空载下,在5s时突然施加负载转矩为-14N·m,此时电机运行于低速发电模式,且分别观察该过程中k'j=-89.81和k'j=0两种情况的静止坐标系下转子磁链的估算情况,如图5(a)所示。由实验结果可以看出:当k'j=0时,电机磁链估算不准确导致运行出现故障;而当k'j=-89.81时,磁链估算正常,电机保持稳定运行。同样地,让电机运行在30rpm的空载下,5s时施加负载转矩-14N·m,此时电机运行于低速发电模式,且观察该过程中k'j=0的情况下定子坐标系下转子磁链的估算情况,如图5(b)所示。由实验结果可以看出:当k'j=0时,即使不做交叉耦合反馈,电机仍能正常运行,且磁链估算准确,该实验结果与前述稳定性分析范围和结论相吻合。
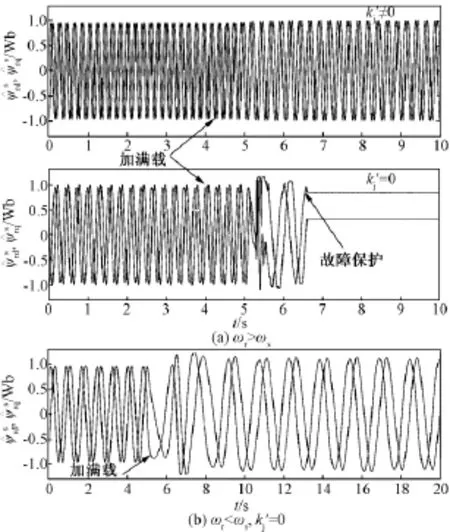
图5 磁链估算实验结果Fig.5Experimental results of flux estimations
7 结论
本文参考已有文献进一步研究了基于电压电流模型的闭环磁链观测器的稳定性,并在不改变其基本结构和参数敏感性的基础上提出了一种可行方案改善其稳定性能,缩小其不稳定区域范围。仿真和实验结果都验证了该方案的合理性和有效性。
[1]张春喜,廖文建,王佳子(Zhang Chunxi,Liao Wenjian,Wang Jiazi).异步电机SVPWM矢量控制仿真研究(Simulation analysis in SVPWM vector control for asynchronous motor)[J].电机与控制学报(Electric Machine and Control),2008,12(2):160-163.
[2]杨光明,王志飞(Yang Guangming,Wang Zhifei).异步电动机矢量控制系统的仿真研究(Simulation of vector control system for asynchronous motor)[J].船电技术(Marine Electric&Electronic Enginerring),2009,29(8):27-31.
[3]张星,瞿文龙,陆海峰,等(Zhang Xing,Qu Wenlong,Lu Haifeng,et al.).一种异步电机定子磁链弱磁控制方法(Stator flux weaken method for the induction motor)[J].电工电能新技术(Advanced Technology of Electrical Engineering and Energy),2008,27(3): 54-57.
[4]陆文斌,姚文熙,吕征宇(Lu Wenbin,Yao Wenxi,Lv Zhengyu).基于改进闭环磁链观测器的感应电机无速度矢量控制(Speed sensorless vector control with improved closed-loop flux observer for induction machines)[J].电工技术学报(Transactions of China Electrotechnical Society),2013,28(3):148-153.
[5]Zhang Wei,Luo Jian Jun.Speed and rotor flux estimation of induction motors based on extended Kalman filter[A].Sixth International Conference on Networked Computing and Advanced Information Management(NCM)[C].2010.157-160.
[6]Jafarifar M,Kianinezhad R,Seifossadat S G,et al. Sliding modeanddisturbanceobserver:Twoviable schemes for sensorless control of induction machines[A].Fourth IEEE Conference on Industrial Electronics and Applications[C].2009.2329-2334.
[7]Lascu C,Boldea I,Blaabjerg F.A class of speed-sensorless sliding-mode observers for high-performance induction motor drives[J].IEEE Transactions on Industrial Electronics,2009,56(9):3394-3403.
[8]Bensiali N,Chaigne C,Tnani S.Optimal observer design for sensorless control of induction motor in regeneratingmode[A].International Symposium on Power Electronics,Electrical Drives,Automation and Motion[C].2006.996-1001.
[9]Cristian Lascu,Ion Boldea,Frede Blaabjerg.A modified direct torque control for induction motor sensorless drive[J].IEEE Transactions on Industry Applications,2000,36(1):122-130.
Stability improvements for closed-loop flux observer of induction machine
HU Qing,WANG Kai
(1.Department of Applied Electronics,Shangqiu Polytechnic College,Shangqiu 476000,China; 2.College of Electrical Engineering,Zhejiang University,Hangzhou 310027,China)
Accurate flux estimation is essential in the speed sensorless vector control system of induction machine.The reduced order flux observer(including the voltage mode and current mode flux observer)has the advantages of both simple structure and reduced sensitivities of parameters.However,the pure voltage mode flux observer has the integral problem whereas the pure current mode flux observer needs the speed information.The voltage and current model based closed-loop flux observer combines the voltage mode and current mode flux observers together and obtains good control performance with small parameter sensitivity but has some drawbacks in the stability characteristics under the low-speed generation mode,thus the motor cannot run normally in this region.Based on the stability analysis of the flux observer and the corresponding conditions,this paper proposes a reasonable method to eliminate the unstable region.Both simulation and experimental results show validity and effectives of this proposed method.
induction machine;closed-loop flux observer;sensorless;stability analysis;low-speed generation mode
TM343
A
1003-3076(2014)12-0015-05
2013-06-02
胡清(1977-),女,河南籍,讲师,硕士,研究方向为DSP数字控制、电力电子、精密仪器与机械;王凯(1986-),男,河南籍,博士研究生,研究方向为电力电子与电气传动。