基于ADAMS/RAIL的直线电机径向转向架曲线通过性能分析
2014-05-30
0 前 言
20世纪90年代以后,城市轨道交通在我国大中型城市迅速发展,各种先进的地铁转向架开始陆续引入国内市场。其中,广州、北京已经先后开始建设和运营直线电机轨道交通系统。这种系统具有车型小、爬坡能力强、曲线通过能力优等特点,特别适合于具有特殊线路条件城市发展轨道交通的需要,因此对其曲线导向能力的研究,有利于提高城市轨道运营维护水平,对交通制式合理选型和规划具有积极推动作用。
1 直线电机轨道交通系统概述
从1985年加拿大多伦多开通第一条直线电机轨道交通系统至今,已在5个国家建成11条线路,总里程超过200km。在国外,拥有直线电机地铁技术的主要有加拿大庞巴迪以及日本川崎、日立三家公司,庞巴迪公司的技术已经应用到多个国家。加拿大温哥华市的skytrain系统是运用直线电机车辆的典范,到2002年底,庞巴迪公司为该系统制造的MK系列车辆已成功、可靠运行10亿公里。开发直线电机车辆的国家还有日本,日本在引进skytrain技术的同时,开发了东京12—000、大阪70等系列车辆。在我国,广州地铁4、5号线则首次采用直线电机轨道交通系统。
目前,直线电机轨道交通系统中的直线感应电机的额定功率都不高(100~200kW),与感应板之间的气隙约8~13mm。由于直线电机轨道交通系统每台转向架下只能装一台电机,单车功率与旋转电机地铁相距甚远(2×180~220kW/转向架),因此目前都采用全动车编组。其车体一般采用整体承载式大型铝合金挤压型材或不锈钢,重量可比碳素钢降低30%~35%,车辆定距和轴距都不大,属于中等运量。直线电机轨道交通系统主要采用第三轨供电(约占55%)和架空接触供电(约占45%),供电电压分为DC750V和DC1500V。
由于是非粘着的驱动方式,直线电机轨道交通系统具有如下特点:
(1)可以实现径向曲线通过;
(2)爬坡性能优良;
(3)建筑成本小;
(4)噪声低。
由于城市轨道交通大都建在市区,线路曲线半径小,因此,良好的曲线通过性能是评价系统优劣的重要指标之一。本文以广州市轨道交通4、5号线引进的直线电机BM3000型车辆为研究原型,研究车辆在有无导向机构下的曲线动力学性能。
2 BM3000型转向架简介
BM3000型直线电机径向转向架是庞巴迪(Bombardier)公司设计的产品。BM3000转向架采用自导向径向转向架设计来满足广州4、5号线小曲线半径的要求。BM3000型直线电机径向转向架 如图1所示。
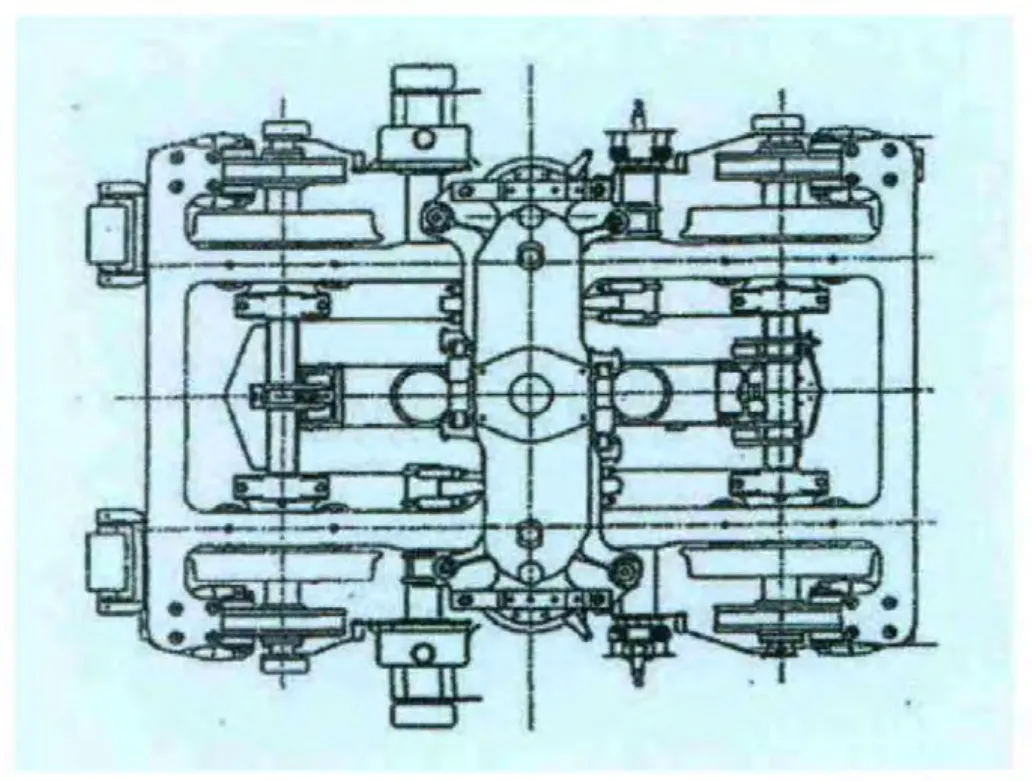
图1 BM3000型转向架示意
转向架构架采用内置方式的焊接钢结构,降低自重。轮对采用整体碾钢轮。轴箱体采用铝合金制造。每个轴箱采用两个圆锥螺旋形橡胶弹簧,二系悬挂位于转向架构架和摇枕之间。
直线感应电机悬挂于BM3000转向架的横跨于轮对轴箱的支撑梁上。每个支撑梁支撑在左右两个轴箱上,直线电机属于簧下质量。支撑梁两端配备橡胶关节,提供电机定子一定的弹性,降低其运行时的振动,满足转向架在允许范围内的弯曲和扭曲。直线电机悬挂在支撑梁的吊臂上,吊臂焊接在支撑梁上,1位轮对支撑梁设三个吊臂,2位轮对支撑梁设两个吊臂,形成直线电机的5点悬挂。直线电机的运动通过吊臂传递给直线电机连接节点。牵引力和制动力通过牵引杆传递到构架,再通过中心牵引装置由摇枕传递到车体。
3 系统仿真模型介绍
本系统模型采用A DA M S软件搭建,其中,ADAMS/Rail(铁道模块)是由美国MDI公司、荷兰铁道组织(NS)、Delft工业大学以及德国ARGECARE公司合作开发的,专门用于研究铁路机车、车辆、列车和线路相互作用的动力学分析软件。ADAMS/Rail可以方便快速地建立完整的、参数化的机车车辆或列车模型以及各种子系统和线路模型,并根据分析目的不同而定义相应的接触模型,可以进行机车车辆动力学等问题的研究。
3.1 车体模型
模型以不带司机室的B车为模板,并将车体看作刚体,分别设置车体的长、宽、高,其主要技术参数为:
车体长×宽×高 16 840mm×2 890mm×3 625mm
地板高度 930mm
轴重≤13t
建成后的车体模型如图2。
图2 车体模型示意
3.2 直线电机转向架模型
采用与实际直线电机定子结构相同的等效方形板来近似模拟直线电机的电磁力激励,其质量、质心位置、转动惯量均与实际电机定子相符。方形板端部分别与左右轴箱采用橡胶弹性元件联接,模拟实际的支撑梁与轴箱的橡胶关节,并设置一定的横向自由度,允许直线电机有少量的横向位移。
直线感应电机悬挂于横跨于轮对轴箱的支撑梁上。每个支撑梁支撑在左右两个轴箱上。直线电机悬挂在支撑梁的吊臂上,吊臂焊接在支撑梁上,视为刚性连接,共有5个吊臂,形成直线电机的5点悬挂。
添加直线电机后的转向架模型见图3。

图3 直线电机转向架模型示意
3.3 转向架导向机构模型
径向转向架的设计思路即尽量减小构架对轮对的摇头约束,使前、后轮对通过蠕滑作用或相应导向机构的调节作用,确保其在通过曲线时趋于径向位置,同时还应避免对车辆横向稳定性产生的不利影响。
按照导向原理的不同,径向转向架可分为自导向径向转向架和迫导向径向转向架。
广州地铁4、5号线使用的BM3000型直线电机径向转向架本身并没有导向机构,在本文中,先后建立了自导向、迫导向型式的机构。
自导向径向转向架的导向机构结构如下:在前后轮对轮轴上分别加上一个传动杆件,传动杆件为刚体,杆件和轮轴之间不限制相对旋转(轮轴方向为轴),但限制轮轴与杆件间的横向位移等自由度。在转向架中部,两个传动杆件之间采用一个弹簧装置连接,并在此处增加一个阻尼器。为了保证添加的杆件不影响转向架的几何特性,将传动杆件的质量、转动惯量设置为很小的数值。中间的弹簧、阻尼质量不计。
经多次分析比较,初选自导向机构的主要结构参数见图4。
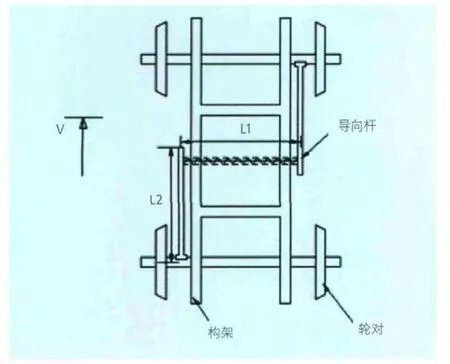
图4 自导向转向架模型
迫导向机构由6根导向杆组成,分别与前后轮对轮轴及车体相连。各导向杆间为铰接,横向布置的导向杆通过中心销装置与构架相联,并不限制横向导向杆与构架的相对旋转。
导向杆的实际布置型式见图5。

图5 迫导向转向架模型
3.4 线路模型
线路由直线段、缓和曲线段和圆曲线段所组成。直线和圆曲线通过缓和曲线平滑地连接。曲率可以采用沿线路展开距离的函数来表示。ADAMS/RAIL采用三次抛物线方程自动数值拟合出缓和曲线,立面线形设置采用直线型顺坡模式。
仿真中采用的线路参数为线路全长400m:50m直线—50m缓和曲线—200m圆曲线—50m缓和曲线—50m直线;圆曲线半径150m;圆曲线上超高值取120mm,缓和曲线上采用直线形超高变化。车辆曲线运行速度为匀速,通过速度V=50km/h。
4 曲线通过动力学性能分析
模型计算参数选用上广州4、5号线车型数据作为参考,对无导向机构、自导向、迫导向转向架车辆的曲线通过性能指标进行仿真研究,并依据GB5599-85进行评定。
4.1 轮对横向位移对比
各种导向型式直线电机车辆的一位轮对横移量变化趋势相同,且数值变化较小,这主要是由于仿真模型中所添加的导向机构主要作用于轮对的纵向,对横向参数影响较小(见图6)。

图6 一位轮对横向位移比较
4.2 轮对横向力对比
在进入缓和曲线的过程中,自导向型式直线电机车辆较无导向机构直线电机车辆略小,在进入圆曲线后,二者数值基本相等;迫导向型式直线电机车辆由于采用导向杆铰接方式,刚度值较大,因而引起轮对横向力大幅增加(见图7)。

图7 一位轮对横向力比较
4.3 轮对冲角对比
在进入圆曲线后,无导向型式直线电机车辆1位轮对冲角值为0.13°左右,自导向型式直线电机车辆较无导向型式直线电机车辆略小,数值大约为0.12°,迫导向直线电机车辆超过轮对径向位置(见图8)。
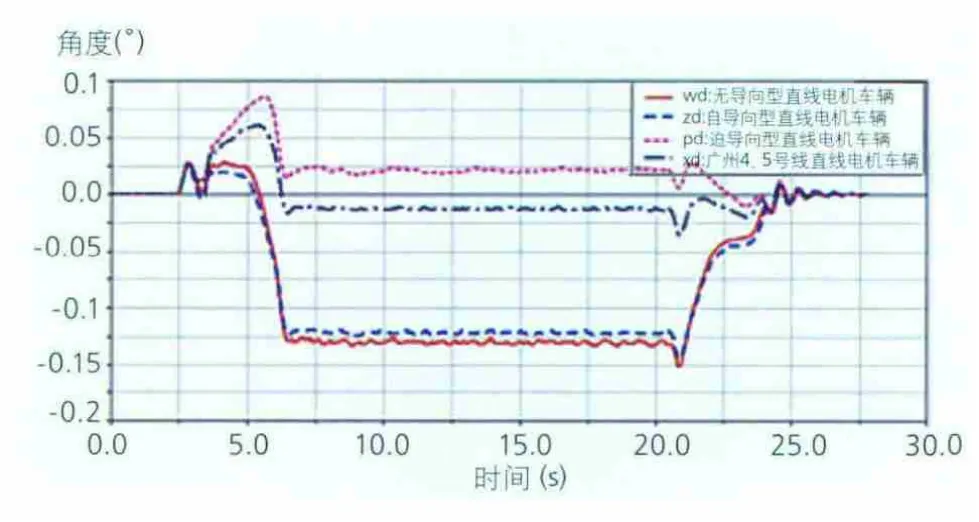
图8 一位轮对冲角比较
4.4 轮对脱轨系数对比
无导向、自导向型式直线电机车辆脱轨系数变化不大,其值在0.25附近,迫导向型式直线电机车辆一位轮对左轮脱轨系数增大至0.3,各值均在允许范围内(见图9)。
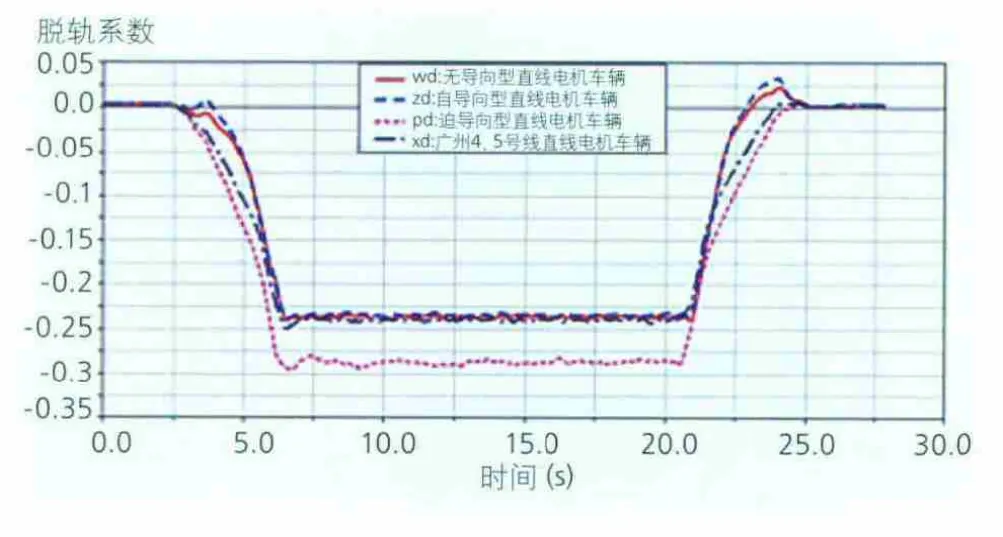
图9 一位轮对脱轨系数比较
4.5 轮对轮重减载率对比
进入圆曲线后,无导向型式直线电机车辆轮重减载率约为0.2;由于自导向机构主要在横向位置起作用,因而自导向型式直线电机车辆该位置轮重减载率变化不明显,其值也在0.2附近;迫导向型式直线电机车辆轮重减载率则大于0.3,各值均未超过允许范围(见图10)。
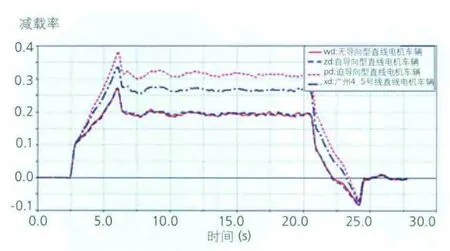
图10 一位轮对轮重减载率比较
5 结 论
本文建立了常规无导向、自导向、迫导向直线电机车辆模型,并在ADAMS/Rail的平台上对各种导向型式直线电机车辆曲线通过性能进行了仿真分析,可以看出:
(1)自导向、迫导向型式直线电机车辆较常规无导向直线电机车辆曲线通过动力学性能指标有所提高,导向能力一定程度上得到改善;
(2)迫导向机构对曲线通过导向性能影响非常明显,但其控制精度往往受到连杆磨耗等因素的影响,需要注意调整和维护。
[1]张定贤.机车车辆轨道系统动力学[M].北京:中国铁道出版社,1996.
[2]叶云岳.直线电机原理与应用[M].北京: 机械工业出版社,2002.
[3]杨利军.直线电机径向转向架车辆结构及性能分析[J].上海铁道大学学报,2000(2).
[4]冯雅薇,魏庆朝.直线电机轮轨交通系统安全性分析[J].中国安全科学学报,2004(8).
[5]张振生.直线电机城市轨道交通车辆综述[J].变流技术与电力牵引,2003(4).
