船舶水下清洗设备控制部分设计
2014-05-23冯燕尔张玉莲
冯燕尔,张玉莲
(浙江海洋学院船舶与海洋工程学院,浙江 舟山 316021)
任何船体水线以下的船壳及螺旋桨都会生长海生物,海生物的附着将会严重降低航速、增加燃料成本,如何在船不进船坞时将附在船体外壳上的海生物清洗掉已经成为一个热门的话题[1]。目前开发出较为先进的智能船舶清洗装置,叫水下清洗机器人,设备成本大,适用于大型船舶的清洗,一般只适应于收益较大的船舶企业使用[2],小型船舶难以承受巨大的清洗费用。清洗装置难以实现大众化、全面化、产业化。为了使清洗设备既简单,自动化程度又较高,可以设计简易的清洗设备。本文设计了简易清洗装置的电气控制系统,主要采用单片机控制液压马达驱动爬行机构及红外对射自动调整叶片高度,使装置吸附在船壳上清洗时的前进、后退、左转、右转、清刷头的自动提升和下降等动作在人 (在岸上)的控制下自动完成,清洗设备既能洗掉附在船壳上的海生物,又能不刮伤船壳表面的油漆。电路系统通过软件的仿真,使设备能实现体积小、调节方便运作可靠等特点,一定程度上弥补了现有水下清洗设备复杂昂贵的缺点。
1 工作原理
船舶水下液压驱动清洗设备是一种半自动化、操作简易的设备。可根据需要随时随地进行水下船体表面的清洗,清洗设备爬行机构控制部分的设计思路主要从硬件与软件着手,硬件方面从基本的电源部分入手,第一部分设计出整个爬行运动机构所需的各种电源电压等级,第二部分加入了对电机选型的研究,其中包括直流减速电机的选型,液压马达型号选择,控制电机正反转状态等,用继电器、放大电路来实现。软件控制方面,加入对程序控制过程的设计,考虑外部信号的输入,达到准确信号的检测,输出控制信号。清洗头部分位置的自动调整,采用2路红外检测,监控和调整清洗头位置,清洗头始终与船体表面保持一定距离,使清洗设备既能洗掉船壳上附着物,又能不刮伤船壳表面的油漆。对整个电路的调试,采用Proteus软件进行模拟运行,来提高设计准确率。清洗设备爬行机构总体结构和电气控制设计方案如图1所示。
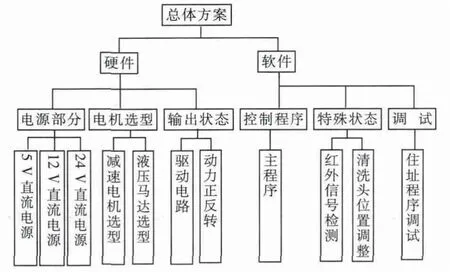
图1 爬行机构电气控制方案整体设计流程图
2 主要结构与关键技术
2.1 开关电源
开关电源采用功率半导体器件作为开关器件,通过周期性间断工作控制开关器件的占空比来调整输出电压[3]。开关电源中,DC/DC转换器进行功率转换[4],是开关电源的重要部分,此外,还具有启动、过流与过压保护、噪声滤波等功能。输出采样电路检测输出电压变化与基准电压比较,将误差电压经过放大及脉宽调制电路后,再经过驱动电路控制功率器件的占空比,从而达到调整输出电压大小的目的。
开关电源以低压稳压芯片L4907A为核心,把输出电压经过取样电路提供反馈电压和5.1 V基准电压进行比较,产生差模信号;再将反馈电压与输入电压比较,获得PWM信号,该信号经降压输出电路,得到稳定输出电压。本设计将输入信号加到锯齿波发生器上,目的是提供1个前馈信号,使器件在很宽的输入电压范围内具有良好的稳压性能。
2.2 程序控制部分设计
为了能实现爬行机构在船体表面爬行到任意位置,应对其运动状态进行控制,由任务可知,其运动状态包括前进、后退、前左转、前右转、后左转、后右转。控制运动规律的实现方法较多,比如通过遥控器进行远程控制。但因为本装置要在水下运行,且海水的盐度较大,无线电波控制需要足够的功率,否则使之难以接收到,故其可实现性不大。考虑加入直接通过线路进行控制的方法,单片机控制处理技术,能对不同的输入端口进行不停的扫描[5],确定不同的输入信号,从而输出不同的控制信号,给驱动部分施加信号,通过驱动部分对电机间接进行控制,以达到理想的控制效果,一般的控制方法不加入反馈容易造成控制滞后,从而导致误操作,在这里加入了水下视频结构,作为主观的反馈,如同在视野明亮的路上控制1辆车的各种运动状态。整个控制过程较为容易实现。
2.3 状态分析控制
该设备应处理的状态包括:前行、后退、前左转、前右转、后左转、后右转、照明手电筒的开启、旋转电机的开启、视频设备的开启和清洗搅拌机的开启。考虑到船体的线型,在清洗过程可能导致清洗搅拌机与船体表面发生刮擦而使船体表面受损,这部分将专门进行分析考虑,先讨论前面10种状态的实现。
图2是整个控制过程的简略图,所有的运动状态的开始均是由外界信号的输入来发起,此处信号的输入是由按钮进行输入,经单片机处理后在相应端口输出一系列的高低电平。一般单片机的功率有限,不能直接驱动继电器使其闭合,故在驱动继电器线圈前应经过放大处理,驱动继电器线圈闭合,并控制开关的通闭,开关的通闭也间接相当于控制电机的各种状态,从而来控制整个状态。
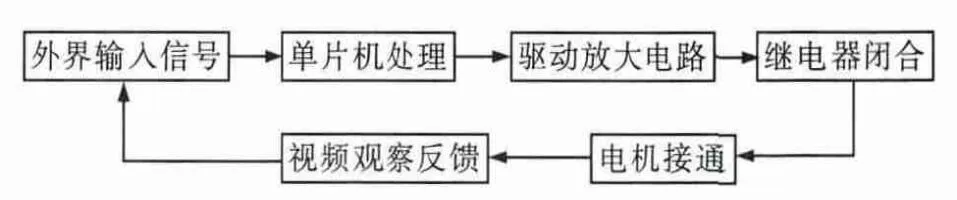
图2 控制过程图
采用上述方案的出发点是为了爬行装置最终适应在海上运行,其附带阻力是越小越好,无线电控制虽有节省却导线的优势,但考虑到可靠性,还是采用有线控制的方式。为减少相对较长的控制线路对单片机系统产生干扰,开关信号输入采用光耦隔离。控制开关端采用24 V电源工作,可提高控制的可靠性。图3是信号线部分的简要示意图,其他部分均已经省去,只加入了单片机晶振部分。信号输入采用P1口,在程序编写过程中,在初始化阶段让程序把P1端口全部写入1,此时P1端口即被内部拉电阻所拉高,从而可以作为输入口使用,当外部感受到低电平中时,即读入该信号。
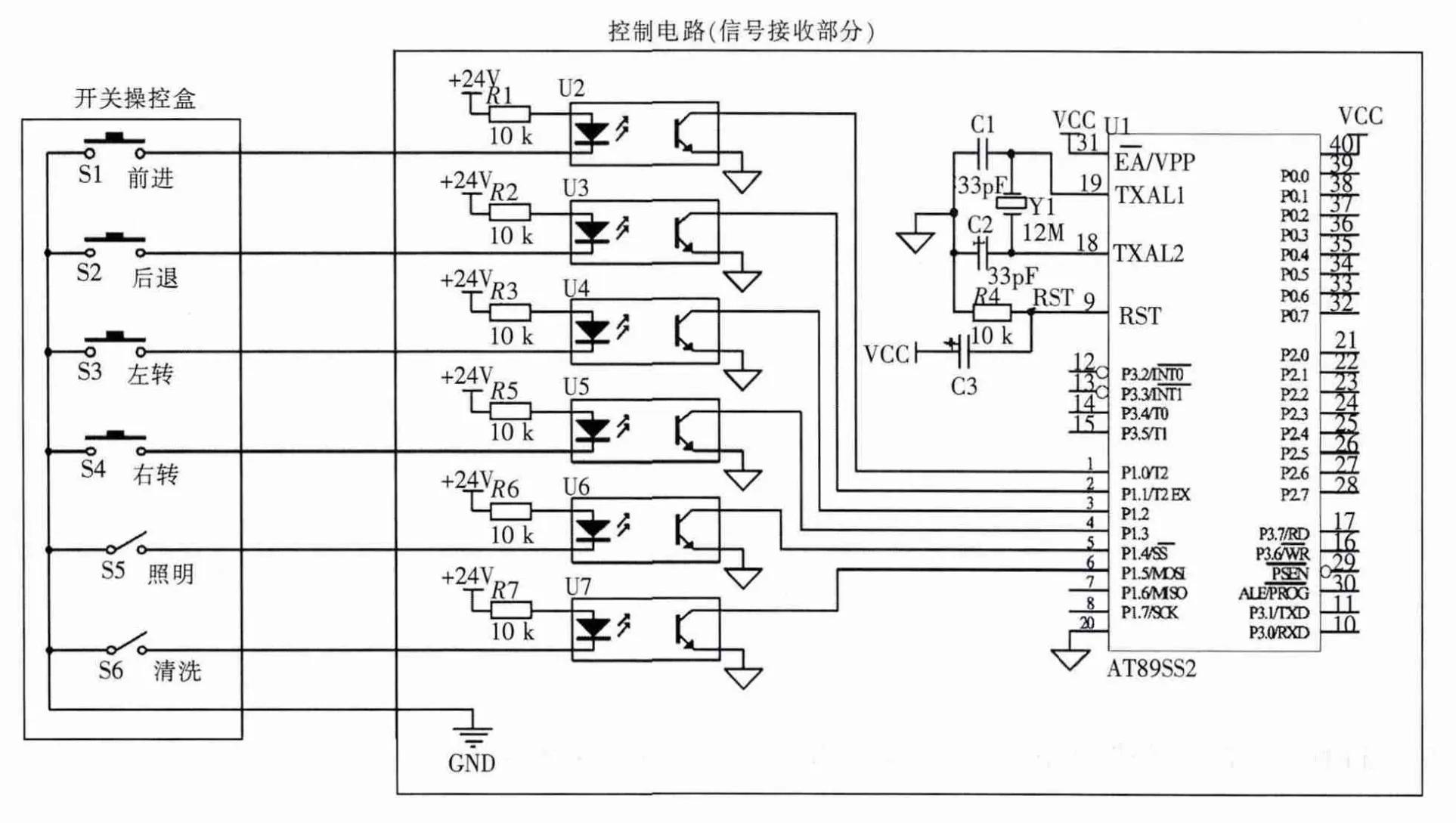
图3 信号线部分示意图
2.4 单片机端口输出[6]
单片机P0口可以当成一般的I/O口进行使用,单片机在驱动外部设备时,一般的驱动电流在毫安级别,难以直接驱动继电器线圈,在其输出口加入放大部分,采用最常见的三极管放大,此时用到PNP型三极管,其原理图如图4所示。
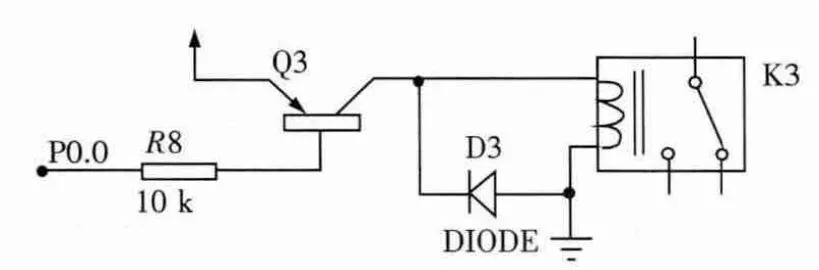
图4 三极管放大电路原理图
在单片机未输出状态下,即P0口为高电平,此时PNP基极为高电平,PNP管处于截止状态,PNP管不导通,继电器线圈两端电压为零,继电器不动作,当P2口输出低电平时,PNP管导通,此时靠近地端的电阻将分到部分电压,即VCC将分压给2个电阻,适当设置2个电阻值的大小即可以适当的分配给线圈一定电压,从而使继电器动作。由数据手册查得,P0口的一位可以同时驱动4个TTL管,而需要的状态输出用到的独立P0位为8位,也即1位只需驱动1个继电器,最多2个继电器,故其可以满足带多继电器的要求,从而不需要考虑端口带不动继电器的问题。当然,当多个继电器吸合的时候,需要一定的电源功率来保证继电器有效稳定的吸合,需要更好的方法为了保证继电器在吸合过程不受电源质量的太大影响。为解决可能发生的因继电器吸合不牢而出现振荡现象,有2个设计保持线圈两端的电压稳定:加大电源功率,或在继电线圈加入电容。
2.5 状态真值表
图5是爬行机构清扫端红外装置的安装位置,假设在爬行机构刚出发时,AB红外反射管圴在同一水平位置。适当设置红外对管的位置让接收管均能接收到发射管发出的红外线,此时定义以下状态:A管能接收到时单片机输入端为低电平,未能接收到为高电平,B管同理。
状态一:AB对外输出端均为低电平,表示AB管离船体表面的距离都较近,此时开动清洗头极容易损伤船体表面,定义为危险状态,需立刻作出调整,抬升清洗头。
状态二:A输出为高电平,B输出为低电平,表示A管离船体有一定的距离,此时清洗头开启后不会对船体表面造成损伤,而B管离船体表面仍较近,定义为正常运行状态,不用对清洗头位置做任何调整。
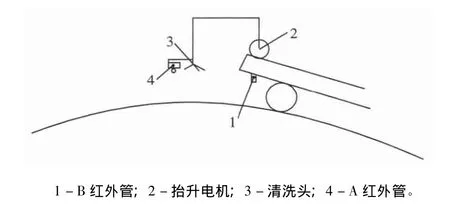
图5 红外管安装位置示意图
状态三:A管输出高电平,B管也输出高电平。此时由于船体表面的弧度已经造成爬行机构的前端离开船体较大距离,清洗头与船体表面的距离也即更远,此时情况虽然不会损伤船体,但是却带来另一个问题,当船体表面的贝壳等附着物的高度小于此距离时,清洗头无法接触到附着物而无法清洗,此时应将清洗头位置降至可以检测到低电平信号位置。
状态四:A管输出低电平,B管输出高电平。此时经过状态三调整抬升电机后使清洗头处于合理位置时,能正常进行清洗,故定义为正常状态,不需要进行任何调整。
表1定义了单片机 (P1.4~P1.5)接收红外信号的处理情况,输入端开关闭合的时候 (接通低电平)状态表示为0,当断开时定义状态为1;在输出端定义输出高电平时为1,输出低电平状态为0,低电平时代表继电器动作,继电器的动作将直接代表着各种状态的改变 (继电器的动作来控制线路的通断)。
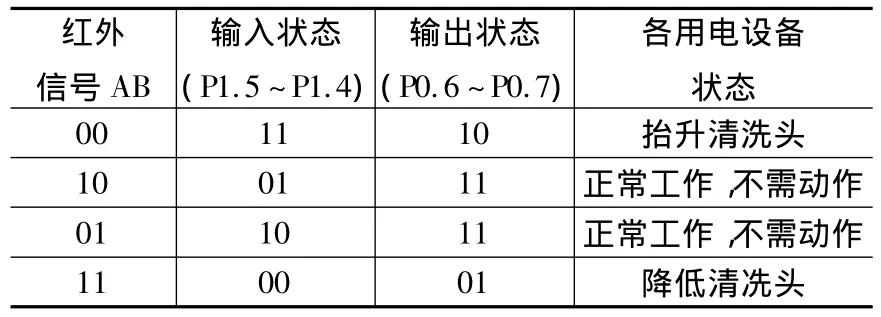
表1 状态真值表
用类似的方式定义了单片机 (P1.2~P1.0),结合图3,开关S1、S2的输入控制了后轮电机的前进、后退等动作,111表示视频与照明均停止;000表示视频设备开启且电机开启,准备;其他6个状态表示视频照明灯开启时动作:110前进、001后退、100前左转、010前右转、101后左转、001后右转;单片机 (P1.4和P1.3)分别控制照明灯与清洗搅拌机的开启与停止。
信号的输入均是以按钮的形式来实现的,这就使得在操作过程中有一定的延时,最大的问题是各种状态之间的切换,以上面叙述中所属的前进状态,切换为左前进状态,此时开关应动作,如果不合理定义动作按钮,将出现中间的其他状态,由110变成100时,此时只需将P1.1口的按钮按下,实现起来较为方便。但是如当状态由后左转直接变成后转时,此时的端口变化为101-011也即发生了2个按钮的操作,也就产生了可能的中间状态:如可能为111、001,对应为停止与后退状态,此时的问题不是很大,但毕竟存在中间状态,故在对于爬行结构前进时,可以同时进行左右转操作,后退也同理。所以在将前进状态变化为后退状态时,经过一中间过程,即前进-停止-后退,防止中间状态的产生。
2.6 仿真调试
整个仿真图模拟爬行机构正常运行的情况,处理芯片为89C51,单片机电源已经省去,加入了12 M的晶振,4路外部按钮输入由SW输入单片机P1口进行输入,因考虑到红外检测部分同理可以用开关简略代表,故采用SW5-SW6来代替。
外部各种设备电源24 V、12 V、5 V等电源电路已经直接用元件库里的电源模块代替,单片机口输出时通过加入三极管进行放大,电路中各继电器均采用RL系列元件表示,输出表示前进与后退等一系列状态均采用直流电机的正反转来表示。经Proteus软件对几个状态进行模拟,并观察输出情况,电机下方框中数字正负可以显示电机的正反转情况及其转速,灯泡显示视频开启情况,仿真结果显示,符合设计逻辑要求。并且模拟了爬行结构运动的4种状态,4电机按不同方式运行,分别可以实现:①电机反转;②电机正转;③电机正转;④电机正转。电机状态与理论中一致,其余状态模拟基本都类似,达到了较好的模拟效果。并且在样机试验中同样得到了很好的效果。比如前左转状态模拟:前左转状态下,①②模拟电机均正转,速度达到+207 r/min,如图6所示。
3 结束语
本论文设计了水下清洗设备的控制部分,主要采用单片机控制电机的正转、反转、左转、右转等,利用红外对射原理保证叶片在清洗过程中始终
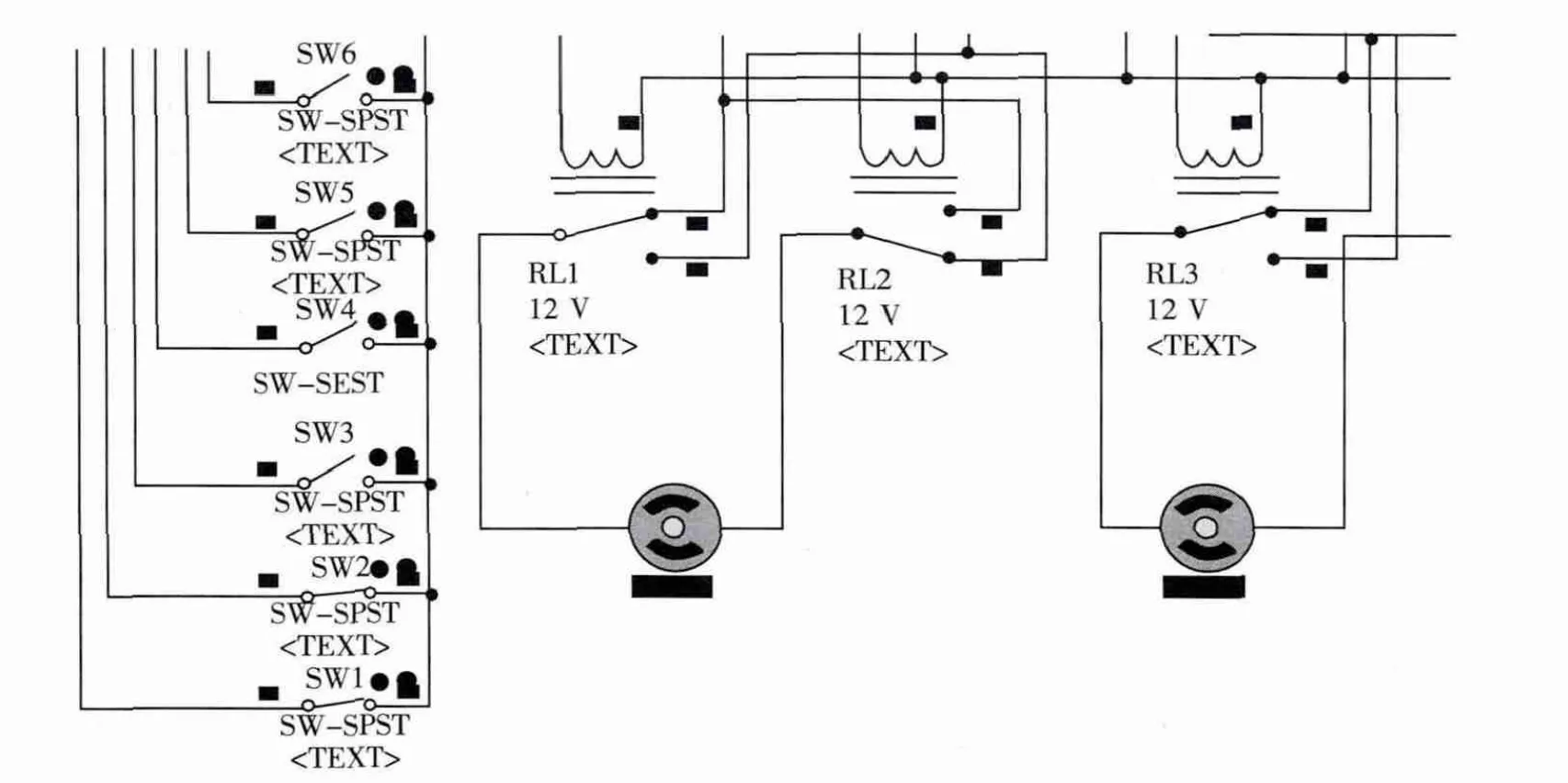
图6 前左转状态模拟示意图
不会碰到钢板表面并且保持最佳距离。利用软件对控制部分的设计原理进行模拟仿真,仿真状态与理论和实验一致。
[1]全玉臣.船舶清洗市场趋势 [J].清洗世界,2007,23(1):63~68.
[2]李敏.水下清洗技术在天津港船舶节能的应用 [J].物流工程与管理,2009(9):104~107.
[3]康华光.电子技术基础模拟部分 [M].5版.北京:高等教育出版社,2006.
[4] Liu Jian,Chen Zhiming,Zhong Yanru.Compact DC -DC Converter for Pocket Micro -controller Systems[J].Journal of Computer Science and Technology,1996(6):607~614
[5]臧春华,邵杰,魏小龙.综合电子系统设计与实践[M].北京:北京航空航天大学出版社,2009.
[6]楼然苗,胡佳文.51系列单片机原理及设计实例[M].北京:航空航天大学出版社,2010.