伺服驱动系统在玻璃瓶包装设备中的应用
2014-05-16张乐波王梅英
张乐波 王梅英
1.(上海科仁企业管理咨询有限公司 上海 200436)
2.(中海石油(中国)有限公司上海分公司 上海 200030)
1.前言
我国目前已经成为世界最大的玻璃瓶生产和消费国,玻璃瓶产量现已超过1000万吨,主要使用行列式制瓶机进行生产。我国的制瓶技术主要来源于美国,随着制瓶机自动化水平的提高,我国玻璃瓶生产能力得到极大的提高。玻璃机械目前已经实现全面国产化,但玻璃机械的周边配套设备在实践中因实用性不强、操作复杂、成本高等原因,影响了推广和使用。随着全球最大的玻璃瓶制品制造商美国OI公司进驻中国和国内人力成本的不断提高,竞争压力加大、客户对价格的耐压性增强,玻璃机械的周边配套设备(如玻璃瓶检验机、玻璃瓶包装机、玻璃瓶堆垛机)的实用化成为迫在眉睫的问题,也成为其发展的契机。
目前,玻璃瓶包装机一般由一个变频器带动交流电机运行,由PLC、单片机进行控制。通过具体实践与客户反馈,玻璃瓶包装机在使用中实用性不强,是因为包装机机械手臂推送动作不理想,主要有几个方面的原因。一是使用变频器控制包装机速度,各种推臂动作速度调节精度不够;二是变频器抗干扰能力和反馈调节能力不足,机械手臂使用过程中误动作和频繁停车情况。因此,本文提出使用伺服电机代替普通电机,使用伺服电机驱动器代替变频器,实现玻璃瓶包装机的各项动作,实用性大大增加。
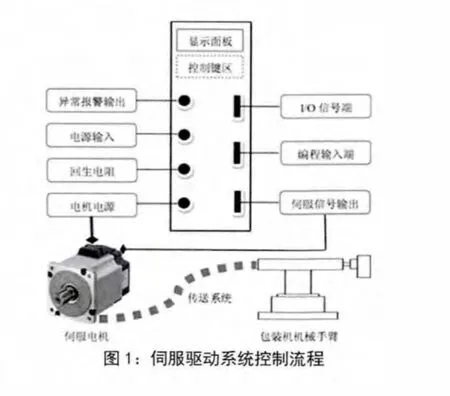
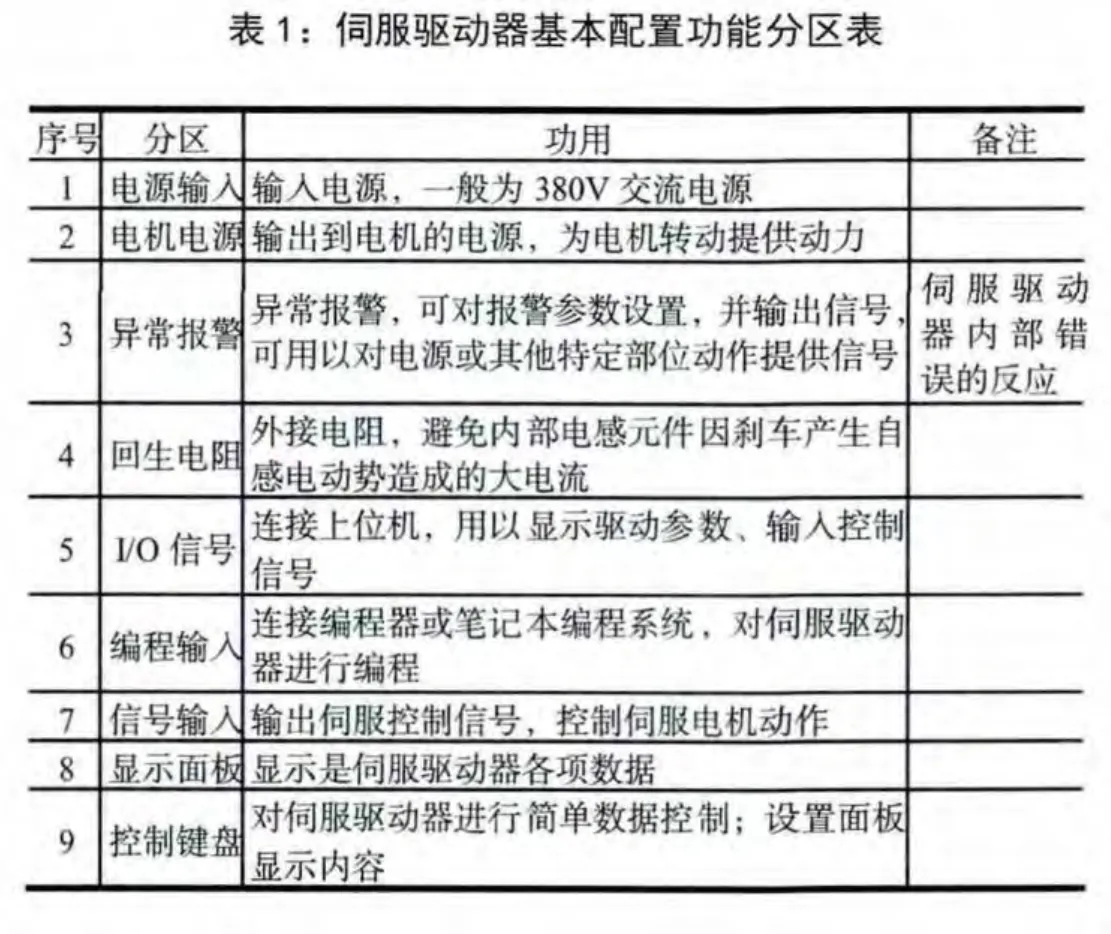
伺服驱动器一般有七个输入输出端,分别为电源输入端、电机电源端、异常报警输出端、回生电阻回馈端、上位机I/O信号端、编程输入端、伺服信号输出端。其次,伺服控制器一般还包括实时显示面板和控制键盘。伺服驱动器各部分功能如下。
2.玻璃瓶包装设备伺服驱动的实现
2.1 伺服驱动系统组成 伺服驱动系统包括三个部分,一是伺服控制器,二是伺服电机,三是传送系统,四是包装机机械手臂,具体组成及控制顺序见下图。
2.1.1 伺服驱动器 伺服驱动器是又称“伺服控制器”,是通过位置、速度和力矩三种方式对伺服电机进行控制、实现高精度的传动系统定位的控制器。具体是将输入电源经伺服驱动器对交流电源进行整形,输出到伺服电机,然后根据编程和参数控制对数据进行处理,输出脉冲控制信号,达到对伺服电机的精确控制。
伺服驱动器可进行标准配置和最简配置,根据客户对包装机产品要求和控制精度,实行最优化处理,增加或减少伺服驱动器外设系统。
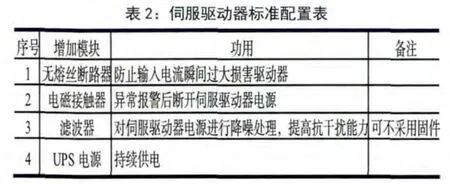
2.1.2 标准配置 为发挥伺服驱动器的最大作用,可增加附属模块,对伺服驱动器进行如下配置。
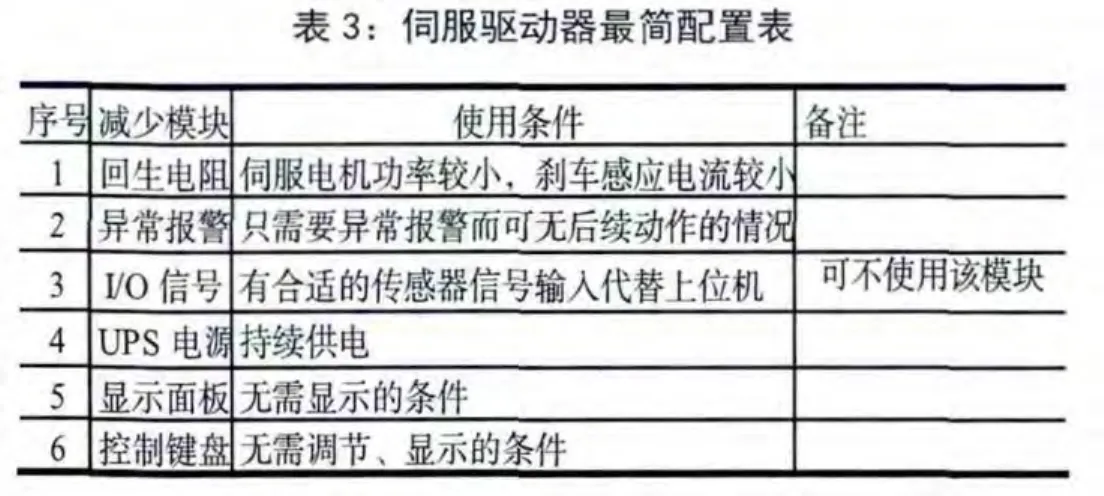
2.1.3 最简配置 为发挥伺服驱动器的最大作用,可增加附属模块,对伺服驱动器进行如下配置。
2.2 伺服电机及传动系统
2.2.1 伺服电机 伺服电机输入的电源和伺服控制信号,均由伺服驱动器提供,可以在一个周期内的各个时间段输出不同的转速和扭矩。玻璃瓶包装机采用交流伺服电机可以满足稳定性和精度要求,同时直流伺服电机价格较贵,因此,本文建议采用交流伺服电机。
2.2.2 传动系统 由于伺服电机直接安装在包装机机体上,与机械手臂直接连接较为简单,因此可以用最简单的传送带带动包装机机械手臂运转。
2.3 包装机机械手臂 包装设备机械手臂一般要实现7个动作,如下图所示。

2.4 伺服驱动参数设置 玻璃瓶包装机伺服驱动系统中伺服驱动器参数一般包括以下几种参数设置:监控与一般输出设定参数;滤波平滑及共振抑制相关参数;增益及切换相关参数;位置控制相关参数;速度控制相关参数;扭矩控制相关参数;数字输出入接脚规划及输出相关设定参数;通讯参数等,其具体参数设置主要取决于对进度和扭矩的控制程度、具体玻璃瓶的高度质量等相关产品参数,在此不再赘述。
3.伺服驱动系统的优缺点及使用展望
如前文所述,相对于变频器控制电机,使用伺服驱动系统控制包装机机械手臂精度高,适应大多数玻璃瓶的包装应用。同时,伺服驱动系统抗干扰能力较强,减少的失误动作次数,极大的提高了工作效率。另外,伺服驱动系统优秀的反馈调节能力,较短的反应时间,使目前的玻璃瓶包装机械的性能得到了很大提高,充分满足玻璃瓶包装市场对产品性能的要求。同时,伺服电机由于噪音小、能耗低,利于作业环境保护和节省能源。但由于伺服驱动系统由于国产化程度不够,价格较高,让伺服驱动系统的推广受到了很大的限制。随着国外玻璃机械进入我国玻璃瓶制造市场和劳动力成本的提高,为制瓶机周边设备的性能提高提供了契机。同时,随着将来伺服驱动系统国产化程度不断提高,成本不断降低,必将在机械制瓶行业有广泛的推广。
[1]手册编写组,ASDA-B2系列使用手册,中达电通股份有限公司,2013.9
[2]手册编写组,Delta CANopen Technical Guide,中达电通股份有限公司,2012.9
[3]手册编写组,ASDA-A2400V安装说明,中达电通股份有限公司,2010.8
[4]颜嘉男等,伺服电机应用技术, 科学出版社,2010.4
[5]寇宝泉等,交流伺服电机及其控制, 科学出版社,2008.10
