基于PCC的遥感跟踪伺服系统设计
2014-05-08张少辉
张少辉
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
0 引言
随着航空航天、空间电子技术的发展,各国在使用卫星方面发展迅速,除常用的同步通信卫星外,各国还在积极发展极轨卫星系统,用于科学试验、环境检测等方面。在地面遥感系统中,伺服控制系统是很重要的一部分。为实现遥感系统的全数字控制,保证任务的准确完成,本文提出基于可编程计算机控制器的遥感跟踪伺服系统。
1 系统组成和工作原理
1.1 伺服系统组成
伺服系统主要由天线控制单元(ACU)、天线驱动单元(ADU)、天线轴角编码器、旋转变压器和安全保护传感器等组成。
1.2 伺服系统工作原理
天线伺服系统的任务就是以各种工作方式控制天线运动,实现天线对目标的快速捕获和精确跟踪,并使之达到系统要求的跟踪性能和跟踪精度。
在系统控制环路设计上,采用典型的位置环、速度环、电流环三闭环控制结构。电流环有利于改善电机的动态特性,克服力矩控制死区和非线性;速度环可以提高系统的调速性能以及抗负载扰动的能力;位置环可以保证位置精度。在系统中,电流和速度调节器(校正)设计在ADU中,位置校正设计在ACU中,由软件实现,软件(即数字化)校正的优点在于其控制策略的灵活性,可以根据实际的需求灵活改变控制参数,以获得设备的大动态范围和良好的控制精度。如图1所示。
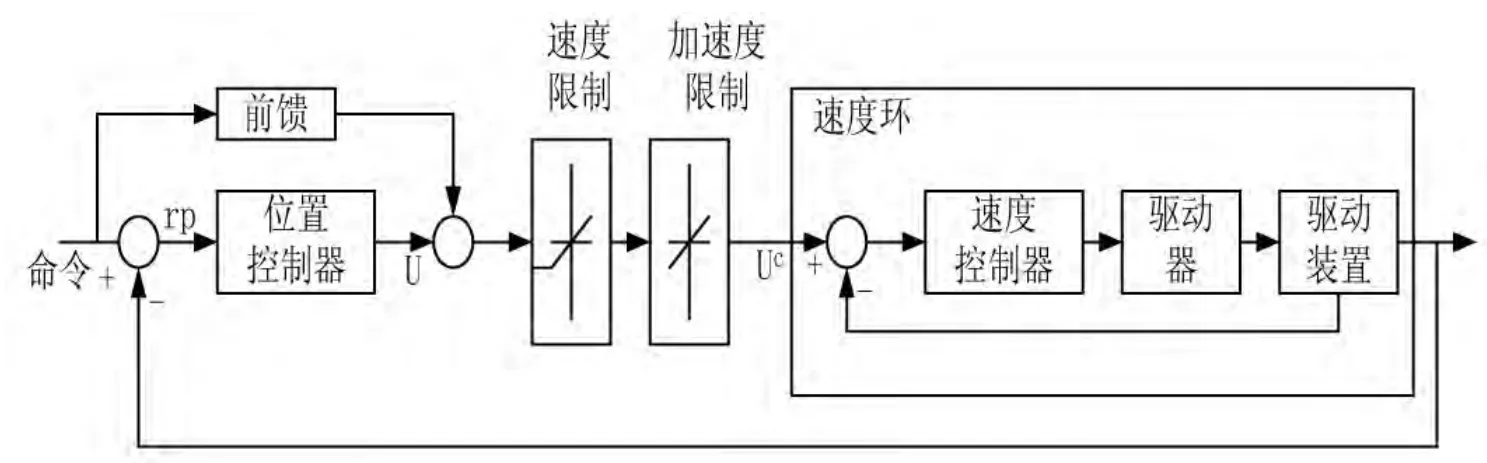
图1 系统控制环路
2 伺服系统硬件设计
2.1 天线驱动单元
方位、俯仰支路的天线驱动控制单元(DCU)由可编程计算机控制器、直流驱动器、直流伺服电机等组成。其中方位、俯仰均为双机驱动。方位、俯仰驱动器均采用力矩偏置的方式以消除传动链的齿隙。其主要功能就是按ACU的误差数据驱动天线对准目标。第三轴(倾斜轴)驱动器采用西门子交流变频器开环驱动,完成卫星过顶时倾斜轴的运行和天线转场时天线收藏展开功能。
多电机控制器选用可编程控制器,通过CAN总线实现对多台直流驱动器的集中监控,数字化总线可以很好的控制多路驱动器协调工作,还可以大大提升驱动系统的可靠性和调速性能。同时多电机控制器与控保单元联合完成驱动系统的安全保护功能。天线驱动控制单元具有可独立操作的手控人机界面,可以本地控制天线以速度模式运动。
2.1.1 可编程计算机控制器
可编程计算机控制器(PCC)配置了基于X86的CPU,不仅具有丰富的对外接口和扩展能力,而且具有很强的运算能力和存储空间,最快任务周期可以达到500μs。本系统中,PCC采用CAN总线网络控制多组直流电机的运动,这不仅可以使电气接线大大简化,系统安装及维护工作大大减轻,调速性能大为提高,而且PCC对直流实时状态信息监控更加具体全面。而且,这种总线控制使系统得配置更加灵活方便,当有个别驱动器发生故障时,PCC可以继续控制其余正常的驱动器工作。同时PCC还与控保单元共同作用,实现驱动系统得控保逻辑,确保设备安全、可靠。驱动控制单元组成原理如图2所示。
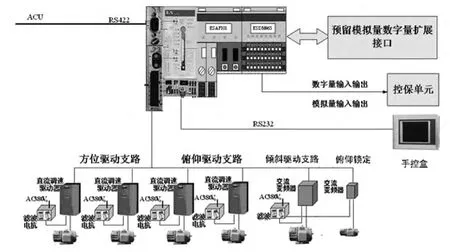
图2 驱动控制单元组成
2.1.2 直流驱动器
直流驱动器选用英国欧陆公司(SSD DRIVES)成熟的工业货架产品DC590+直流可控硅驱动器。该产品广泛应用于工业控制领域,体积紧凑,可靠性高,拥有丰富的对外接口和运动控制功能模块,具有完备的安全保护能力。其主要功能和参数如下:
a)380V三相交流电源输入;
b)35A,440Vmax直流输出;
c)全数字环路控制功能,电流环路自动调整;
d)丰富的运动控制功能,模块可配置,参数可调整;
具有自动故障诊断和保护功能,可实现过电流、过电压、欠电压、过负荷、过速等异常检测保护等功能。
2.2 天线控制单元
天线控制单元主要由工控机和标准板卡组成,实现天线的各种控制功能和控制策略,最终完成天线对目标的精确跟踪,是集控制、测量、监视、计算、通讯和数据处理等功能为一体的全数字化设备。集成度高,人机交互界面友好,操作维护可靠、方便。天线控制单元方案设计的出发点是在保证功能、性能满足要求的前提下,充分考虑设备的自动化程度、设备运行高可靠性以及软件设计的工程化程度等各个方面。
2.3 轴角编码单元
跟踪系统中的位置反馈电路主要是将天线的角度位置量转换为数字量,我们采用旋转变压器、RDC片组合电路方案,这种方案的优点是转换精度高,直接产生数字信号,使用方便,并且不易受到干扰。
3 系统软件设计
3.1 坐标转换
采用带倾斜轴的座架体制实现过顶跟踪,最简便而有效的方法就是在每次任务开始前,ACU根据轨道预报的理论引导数据的最大仰角值,判断该次任务的卫星目标是否过天顶盲区以及计算其过顶的方向,若过顶,则预先引导倾斜轴向预定方向倾斜,若不过顶,则倾斜轴不倾斜,天线工作于A-E座架。每次跟踪结束后,倾斜轴自动回倾斜零位,等待下一任务。
由于过顶跟踪时,方位俯仰座架是倾斜于大地水平面工作的,所以要得到理论轴角(地理坐标系的方位和俯仰角)就必须对座架轴角进行实时坐标转换,同时还要对理论引导轴角数据进行实时坐标反转换,以使天线得到正确的指向。
坐标转换公式如下:

式中:
P——为座架的倾斜角度;
K——为倾斜轴相对大地北的角度。
3.2 控制策略
伺服采用二阶无静差体制,它的开环传递函数如下式所示:
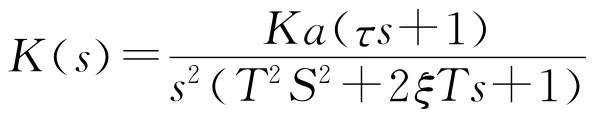
上式的对数频率特性曲线如图3所示。
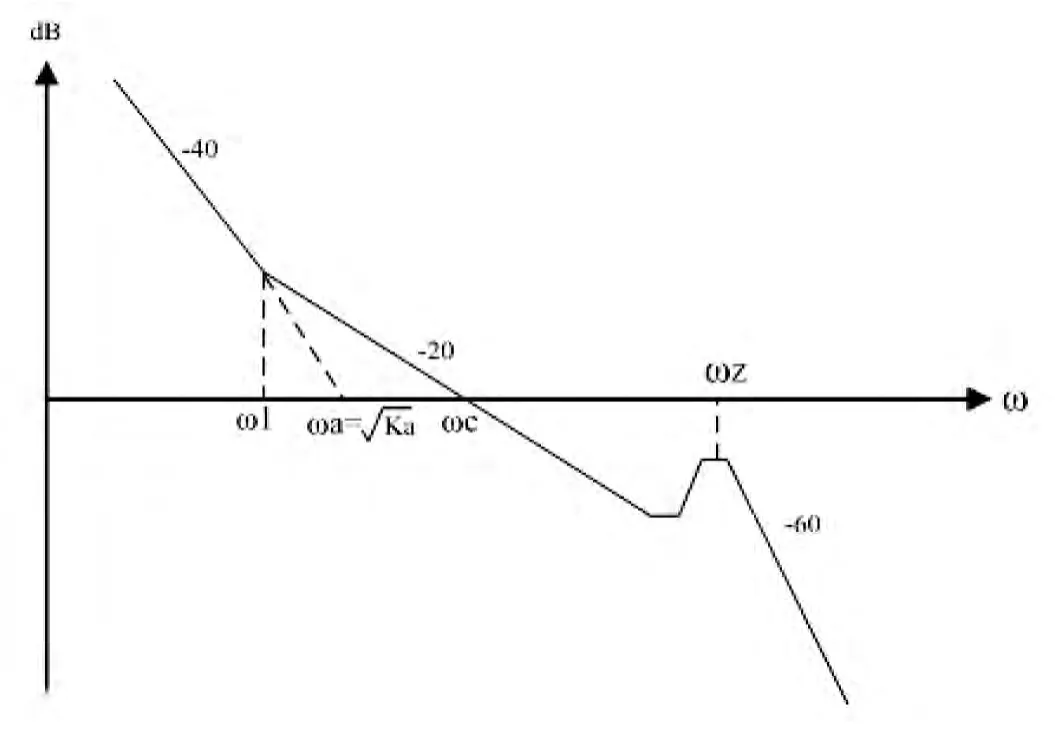
图3 谐振频率特性曲线
位置环采用数字PI调节器使伺服为二阶无静差体制。PI调节器用软件来实现,这样可省去运算放大器,减小其漂移和零偏造成的跟踪误差或指向误差。
采用的算法公式如下:

式中:
kp——为比例放大系数;
Ts——为采样周期;
Ti——为积分时间常数;u(k)——为当前增量输出;e(k)——为第k次偏差。
4 跟踪测试结果
伺服系统中使用PCC数字控制后,伺服系统的快速性和稳定性都有所提高,稳态精度达到0.01%,消除了模拟系统中的离散和漂移。大大提高了系统的可靠性。
该系统设计调试完毕后,在用户现场安装运行执行任务,伺服跟踪系统跟踪良好,性能稳定可靠。图4是该系统跟踪某极轨卫星的跟踪误差电压曲线。
系统跟踪精度指标要求:不低于1/10波束主瓣宽度(对于S频段跟踪精度小于0.128°)。根据图4中高仰角跟踪数据分析,对于跟踪高仰角的目标时,A轴跟踪误差δA为0.022°、E轴跟踪误差δY为0.008°,系统跟踪误差δ为0.023°,跟踪精度超过了1/10波束主瓣宽度,满足系统设计的跟踪精度指标要求。

图4 跟踪轨迹和跟踪误差曲线
5 结束语
本文针对某极轨卫星地面站天线伺服系统,首先介绍系统组成及工作原理,其中特别讨论了基于可编程控制器PCC的分析和使用,配合全数字直流驱动器的使用,解决了AET天线座架的过顶跟踪问题,同时提高系统的快速响应和稳定性。该系统经过一年多的试运行,已经移交用户,实际现场运行表明,该伺服控制系统方案设计合理的、可行的。
[1] 王德纯等.精密跟踪测量雷达技术[M].电子工业出版社.2006.
[2] 王万玉.倾斜机构在极地卫星过顶跟踪中的应用[J].遥测遥控.1999,20.
[3] 欧陆公司.欧陆直流驱动器使用手册.
[4] 李小平.天线座过顶跟踪.通信与测控[J].1992,(4):
