高速复合型水翼船运动特性仿真研究
2014-05-07赵雄飞杨理华
赵雄飞,杨理华
(1.哈尔滨703所 军事代表室,黑龙江 哈尔滨 150001;2.海军工程大学 船舶工程与动力学院,湖北武汉 430033)
0 引言
近年来,随着人类对海上资源的开发需求,水面舰船的综合性能受到广泛关注。传统排水舰船已无法满足多性能的要求,集多种船型优势于一体的高性能多体船便应运而生[1]。高性能多体船主要包括双体水翼船和三体水翼船[2]。Calkins[3]最先提出三体水翼船概念,研究表明该船型比传统三体船及水翼船具有更好的快速性和耐波性。任俊生等人[4]研究了双体水翼船在首浪和尾浪条件下的运动,但未考虑船体阻力及推力的影响。羊少刚等人[5]研究了基于势流理论的水翼船运动,但没有分析船体运动姿态。本文以改装的三体水翼船TR3800[6]为例,分析船体受力并建立其垂直面非线性数学模型,利用MATLAB研究单操水翼对船体运动姿态的影响。
1 三体水翼船受力分析
本文取O-xyz为大地坐标系,O0-XYZ为船上附体坐标系,加装首、中、尾水翼系统的船体纵向剖面受力示意图如图1所示。

图1 船体纵向剖面受力示意图
1.1 水翼受力分析
作用于水翼上的流体动力主要有升力L、阻力D及惯性力Fa,具体计算如下:
其中:CL为升力系数;ρ为水的密度;S为水翼的平面面积;v为航行速度;Cdo为黏性阻力系数;Cdi为诱导阻力系数;c为水翼弦长;b为水翼展长;z··为船体在Oz方向的加速度,u为O0X 方向上的速度;θ··和θ·分别为船体纵倾的角加速度和角速度;Xa为水翼翼展中心处在附体坐标系中的横坐标。
1.2 船体摩擦阻力的计算
船舶航行时的摩擦阻力为:

其中:Cf为粗糙度系数;ΔCf为粗糙度补偿系数;B为船舶的型宽;d为吃水深度;Cb为船舶的方形系数;l为船体的实际水线长度。
1.3 船体黏压阻力的计算
黏压阻力Rpv与船舶的形状系数k有密切关系,其近似公式为:
1.4 船体兴波阻力的计算
高速船的兴波阻力RWTRi占总阻力的比重较大,仿真时不能忽略,可用下式进行表示:

其中:RWOcat为两侧体构成的双体船兴波阻力;RWM为主船体形成的兴波阻力;RIOM为主船体与两侧体间的兴波干扰阻力,具体计算参见文献[7]。
1.5 船体喷水推力的计算
本文三体水翼船使用哈密尔顿HJ292型喷水推进器,其推力T由下式计算:

其中:Q为喷泵的流量;va为喷泵出口水流速度;ve为喷泵进口水流速度;vp为泵叶处的水流速度;Da为喷口直径;Dp为泵叶处直径;Aa为喷口处的面积;Ap为泵叶处的面积。
1.6 船体升力的计算
三体水翼船的单体长宽比较大,可视为小展弦比的水翼。升力FH沿O0Z轴负向,其大小及在O0X轴上的作用点为:


其中:Bmax为水线面最大宽度;lw为船体的水线长度,估算时可取船长;Xg为设计时船体重心距船尾的纵向距离。本文因主体的升力远大于侧体,计算时可将两侧体升力忽略。
1.7 船体浮力的计算
船体在水中因排开水而产生浮力,其排水体积▽及浮力Δ大小如下:

其中:A(Xi)为横剖面在水线面以下部分的面积;LF和LA分别为船体水线面前、后端点到船体坐标原点的距离。
2 三体水翼船的数学模型
三体水翼船集合了水面舰船、水翼船、多体船的相关特性,运动姿态相当复杂,很难用精确的数学模型来描述。本文通过受力分析并忽略横摇、横荡及风浪力的影响,建立垂直面非线性数学模型如下:


其中:m,mX,mZ为三体水翼船的质量及附加水质量;x··为纵向加速度;w为O0Z方向速度;θ为船体纵倾角;FXRi和FZRi分别为各个水翼力在O0X和O0Z轴上的分量;Rfi为摩擦阻力;Rpvi为黏压阻力;Li和Di分别为各个水翼的升力和阻力;Fai为各水翼的惯性力;Ffi和Fsi分别为主、侧船体浮力及升力;IYY和JYY分别为O0Y轴的转动惯量和附加转动惯量;Xi,Zi分别为水翼在船体上作用点坐标;XBi和XHi分别为各船体的浮力和升力在O0X上作用点坐标;Zp为推力在O0Z上作用点坐标;li为首、中、尾水翼的支柱长度;αi为首、中、尾水翼攻角。普通船舶航行时姿态变化不大,但三体水翼船与之不同,高速航行时航速、吃水、纵倾等会有较大变化,仿真时应充分考虑。
3 模型运动仿真
以本文三体水翼船的非线性数学模型为基础,用MATLAB分别仿真单操首、中、尾水翼在-10°,-6°,-2°,2°,6°,10°时船体纵倾、吃水以及航速的响应,结果如图2、图3和图4所示。
由图2可知:α1=-10°时,有θmin=-1.5°及dmax=1.05 m;α1=10°时,有θmax=3.2°及dmin=0.6 m;α1=-10°时,有vmin=21 kn;α1=6°时,有vmax=24.95 kn,然而当α1=10°时,v=24 kn<vmax。这说明随着首水翼攻角的增加,船体所受到的阻力减少,船体埋首转变为抬首,吃水逐渐变浅,航速在一定范围内是增加的。图3中单操中水翼船体姿态变化趋势与首水翼相似。
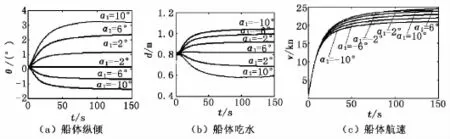
图2 单操首水翼模型的响应
由图4可知:α3=-10°时,有θmax=5.5°,dmin=0.72 m及稳态θ=3.95°;α3=10°时,有θmin=-3.2°,vmin=15.5 kn及稳态θ=-2.2°;α3=6°时,有dmax=0.925 m;而α3=-2°时,有vmax=23.5 kn。随着尾水翼攻角的增加,船体渐减由抬首变为埋首,操尾水翼α3=-10°时,瞬时纵倾θmax=5.5°,这是因为船体高速航行时,船尾受到向下拉力突增导致船体纵倾迅速增大,此后在扶正力矩作用下恢复平衡状态,α3=10°时状态与之相似。吃水在α3=-10°时最浅,这是因为船尾向下拉力剧增,而船体重心则接近于水面,故而重心处吃水会减小,此后在扶正力矩作用下达稳态时重心吃水又变深,在α3=6°时吃水达最深,但α3=10°时吃水并未增加且出现了严重的埋首现象,这是因为船体阻力太大,尾部升力矩较大所致。由此可知尾翼进行大攻角操纵时,模型振荡较为严重,这在实际操纵中是极其危险的,应予以重视。

图3 单操中水翼模型的响应

图4 单操尾水翼模型的响应
4 结论
(1)尾水翼对船体纵倾影响最为敏感,首水翼次之,中水翼则最小。中水翼对船体的升沉最为敏感,首水翼次之,尾水翼最小。船体纵倾太小会出现埋首而不利于航行,纵倾太大阻力增加其航速也会降低,船体吃水对航速的影响与其相似。
(2)通过受力分析及运动仿真,验证所提模型的正确性及合理性,为实船的操纵与控制提供了良好的理论基础,以后应综合考虑不同水翼攻角组合对船体姿态的影响。
[1] 赵连恩,韩端锋.高性能船舶水动力原理与设计[M].哈尔滨:哈尔滨工程大学出版社,2007.
[2] 林建国,许维德.三体水翼船综述[J].船舶工程,1995(2):20-22.
[3] Calkins D.HYCAT:hybrid hydrofoil catamaran concept[J].AIAA Paper on Ocean Engineering,1984(1):1-21.
[4] 任俊生,杨盐生.高速水翼船操纵模拟器中运动数学模型的研究[J].系统仿真学报,2005(17):316-318.
[5] 羊少刚,李干洛,李洁雅,等.新型内河高速双体水翼船设计研究[J].造船技术,1994(2):1-10.
[6] 卢晓平,姚迪,王中.三体船操纵特性计算机数值仿真[J].中国舰船研究,2010(5):1-7.
[7] 应业炬,赵连恩.用Rankine波幅函数预报高速三体/五体船主体与侧体的兴波阻力干扰[J].船舶力学,2008(4):530-537.
