一种嵌入式月面巡视器移动系统模拟器设计*
2014-05-06李志平
杨 洁,张 志,李志平,邢 伟
(1.北京控制工程研究所,北京100190;2.北京航空航天大学自动化科学与电气工程学院,北京100191)
0 引言
随着航天技术的飞速发展,行星探测成为研究热点.月面巡视器通过控制分系统的移动控制驱动组件对移动分系统电机及机构进行控制驱动,完成对月表崎岖复杂环境的巡视探测任务.移动控制驱动组件的在轨可靠工作成为关系到任务成败的关键,需配备专用的地面测试设备对其功能性能进行充分测试,特别是在变负载、变参数时,移动控制驱动组件需具备适应负载扰动的控制算法和快速可靠的驱动能力.
许多研究者已在电机控制驱动系统测试领域开展了研究,并取得了一些成果[1-8].最常见的是采用“真实电机+负载”的方式构成测试系统,其负载设备可以是电机或液压系统等.李宗帅等[5]对国外基于电动技术的机械负载模拟进行了综述.文献[7]利用磁粉制动器充当负载实现异步电机的机械特性与稳定性测试.这类“真实电机+负载”形式的测试系统优点是系统构建所需的信息相对简单,缺点是缺乏灵活性.另一些采用了模拟器的方式,可分为信号级模拟器和功率级模拟器.信号级模拟器可对电机参数,Hall、旋变信号等传感器信号进行仿真模拟,验证控制算法的有效性,其优点是简单灵活且精度高,但不能满足对驱动能力测试的需求.功率级模拟器则指在完成信号级模拟的同时,可模拟负载变化时电机绕组的电流变化,验证控制驱动电路驱动能力的模拟设备.文献[1]提出一种高速双极电流源模块,作为感性负载模拟器使用,实现交流电机真实电流波形的模拟.国内黄清军等[4]对直流力矩电机模拟器进行了研究,实现了电机控制器装置的考核测试.
本文介绍了一种嵌入式月面巡视器移动系统模拟器设计方案.该方案实现了直流无刷电机模拟,在实现电机控制中使用的Hall、旋变等传感器信号模拟的同时,实现了在试验室环境下对移动系统电机及移动系统机构月面行驶产生的负载力矩的功率级模拟,满足月球系统测试需求.文章分析了模拟系统的功能性能需求;给出了模拟系统整体方案设计及硬件、软件的具体实现方法;最后对模拟器的工作及测试情况进行了介绍.
1 系统概述
1.1 需求分析
为满足试验室条件下移动控制驱动组件测试需求,从测试的实用性和有效性考虑,移动系统模拟器应具有如下功能.
1)移动电机模拟:模拟器能够接收控制驱动组件的脉冲宽度调制(PWM,pulse width modulation)信号,进行电机模型的实时解算,输出Hall换向和旋变等传感器信号,实现控制驱动组件的电性闭环测试.其中,电机模型的参数可控,可适应月面工作环境下电机参数的变化情况.
2)移动机构负载模拟:根据动力学解算得到移动轮系月面行驶的实时负载力矩,通过电机负载模型计算绕组相应的电流变化,并加载相应真实电流到控制驱动组件,以实现电机负载力矩的模拟,验证控制驱动组件的驱动能力.
3)人机交互及通信接口:模拟器应能够提供人机交互功能,便于测试人员设置工作模式及参数,监测模拟器工作状态;还应提供CAN、Ethernet等标准接口,以便接入测试系统,接受调度控制并将测试过程数据入库存储.
本文提出的嵌入式移动系统模拟器关键技术及难点在于:
1)针对直流无刷电机进行信号级及功率级模拟;
2)实现外部模拟负载的在线闭环注入,考察被测设备(电机控制与驱动组件)功能性能;
3)移动控制驱动组件的输出及采样频率较高,对移动系统模拟器的实时性提出了较高的要求,模拟器采用DSP+FPGA的硬件架构满足实时性要求;
4)由于本模拟器是实现月面巡视器移动系统的模拟,测试过程中需要与星上产品对接,模拟器本身的可靠性设计要求比以往工业应用产品要更苛刻.
1.2 模拟器工作原理及方案设计
1.2.1 模拟器工作原理
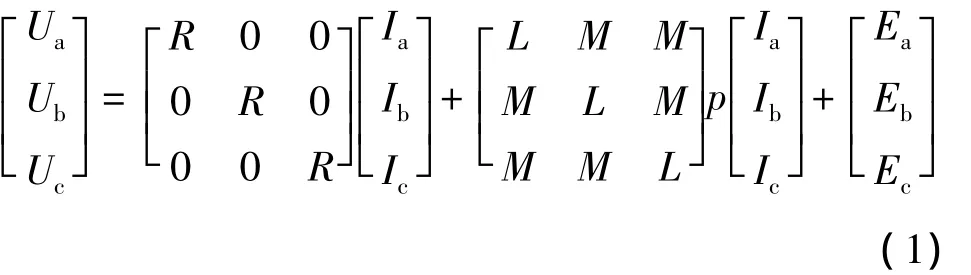
月面巡视器移动系统电机采用三相直流无刷电机,其数学模型如下.
电压平衡方程:
电磁转矩方程:

运动方程:

式(1)中,Ua、Ub、Uc为定子各相电压,Ia、Ib、Ic分别为三相绕组电流,R为定子各相绕组电阻,L为定子各相绕组自感,M为定子间各相绕组的互感,Ea、Eb、Ec分别为三相绕组空载反电势,p为微分算子且p=d/dt.式(2)中,Te为电机电磁转矩,Ω为电机转速.式(3)中,TL为折算到电机轴上的负载转矩,J为转动惯量,β为黏性摩擦系数.
对于直流无刷电机而言,其输入量是电机本体参数、控制电压和负载转矩,输出量是相电流、转速和电磁转矩等状态量.在电机本体参数、控制电压和负载转矩已知时,电机的各种电气及机械状态量都可以通过电机的数学模型求解得到.
1.2.2 模拟器总体方案设计
移动系统模拟器设计采用了模块化设计思想,在保证可靠性的同时降低其软硬件的实现难度,还兼顾了后期的维护与扩展.移动系统模拟器由控制计算机和多个电机及负载模拟单元组成,如图1所示.
控制计算机由一台工控机实现,用于实现人机交互,接收调度控制及实时负载力矩,发送给各电机及负载模拟单元,并汇总测试过程数据完成入库.
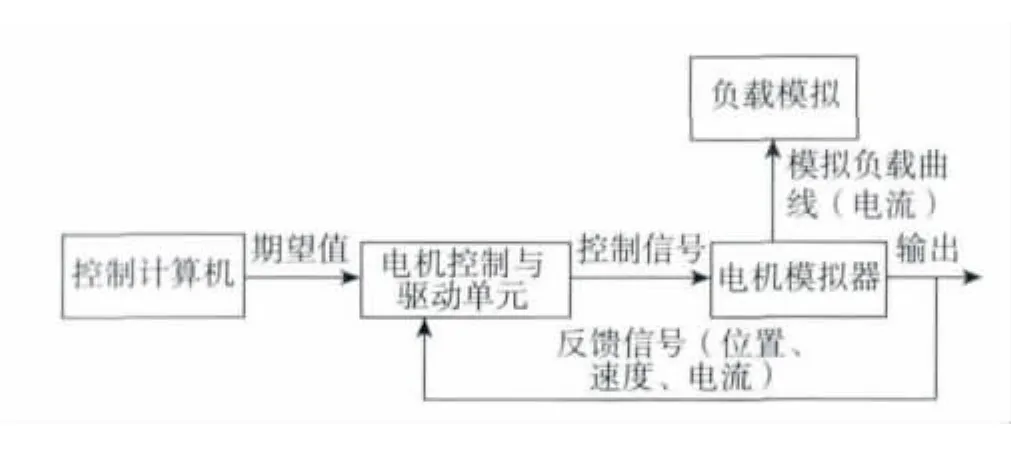
图1 移动系统模拟器组成框图Fig.1 Moving system simulator
电机及负载模拟单元主要分为实时解算部分和电子负载部分,每个电机及负载模拟单元对应模拟一台移动电机及相应负载,如图2所示.其中实时解算部分采用DSP+FPGA架构,负责根据PWM信号的采样结果,以及电机和负载模型解算得到相电流、电磁转矩、电机反电势、转子位置等,输出传感器信号和电子负载控制.实时解算部分设计上充分发挥DSP的浮点计算能力和FPGA的高速并行处理能力以及丰富的I/O资源,以满足对模拟器的实时性及精度的要求.
电子负载部分包括可控电流源、电压采样电阻、主电源和电流源电源.电压采样电阻用于PWM采样,主电源和电流源电源分别负责为系统和可控电流源供电,可控电流源负责实现电机绕组相电流的模拟输出,是该部分设计的关键,其输出实时性和精度直接关系系统的实际性能.
2 硬件设计
2.1 实时解算部分设计
如图2所示,实时解算部分的核心由DSP和FPGA组成,配合相应的ADC和DAC实现电机及负载模型的实时解算和对电子负载的控制.DSP和FPGA之间通过双口RAM进行通信,速率可达到10Mbit/s.实时解算过程中,通过ADC对移动控制驱动组件输出的PWM电压进行采样,送入FPGA中进行电流解算,并通过双口RAM将数据送入DSP中进行计算.在DSP中完成反电势计算、电机位置估算、Hall信号计算、电机及其负载模型计算.DSP将所有计算结果通过双口RAM送给FPGA.FPGA通过I/O数字端口和DAC通道输出可控电流源、旋变正余弦信号、Hall信号等.
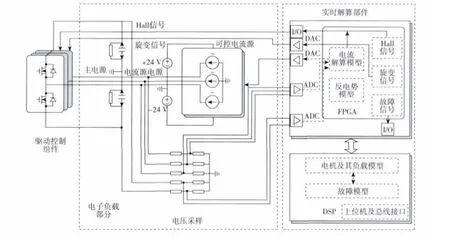
图2 电机及负载模拟单元硬件设计原理图Fig.2 Hardware of the motor and load simulating unit
为满足实时性要求,DSP使用 TI公司的TMS320F28335芯片,具有150 MHz的高速处理能力,具备32位浮点处理单元,片内内置256 K×16 bit FLASH,其有良好的浮点计算能力,可以满足电机转矩方程、负载机械方程以及故障模型的实时计算需求.
FPGA使用的是ALTERA公司的EP2C35F484芯片,主频可达100 MHz.高速并行的计算能力和丰富的I/O资源使其能够满足多电机实时性仿真对快速性的要求,主要实现对电机电压方程的快速计算,ADC、DAC的控制和相关信号的输入和输出.
ADC芯片使用AD公司的AD6644,绕组电压的最大采样频率达到20 MHz.DAC芯片使用AD公司的AD9755,正常输出的速率可达1 MHz.线性光隔使用Agilent的HCNR201,最大转换速率可达1 MHz.
2.2 电子负载部分设计
考虑到对绕组电流实时模拟的需要,可控电流源需要根据实时解算部件的计算电流值快速模拟出相应大小的绕组电流,而常用的开关型电流源将难以满足实时性的要求.
为了保证电流输出的实时性及稳定可靠,本文采用大功率运放PA12构成可控恒流源,如图3所示.FPGA计算得到的绕组电流经电压型DAC转换,通过高频响线性光耦隔离后,由大功率运放PA12实现电流输出.
如图3所示,当R1=R2=R3=R4时,RL上的电流IO=Uin/RS,即输出电流与负载RL无关,通过改变输入电压Uin可以控制输出电流IO.
3 软件设计
模拟器软件设计主要指电机及负载模拟单元中实时解算部分软件设计,包括DSP软件设计和FPGA软件设计.其中DSP软件负责实现整个系统的调度以及电机和负载模型的解算、反电势的计算、转矩方程计算和转子位置计算等.FPGA软件主要负责电机绕组电压方程的计算和各类接口电路的输入输出等.本方案借助于DSP+FPGA的高速处理能力,通过对DSP和FPGA各自功能的合理划分,充分结合2种高性能控制器各自硬件特点,发挥各自的优势,实现对移动电机及负载的实时模拟.

图3 可控电流源设计原理图Fig.3 The controllable current source design
3.1 DSP 软件设计
DSP软件主要实现电机转子位置和反电势的计算,按功能可划分为初始化及自检模块、电磁转矩计算模块、转子角加速度计算模块、电机转速计算模块、反电势计算模块、电机转子位置计算模块、网络通信模块等.
DSP软件中算法流程图如图4所示,主要功能及步骤如下:
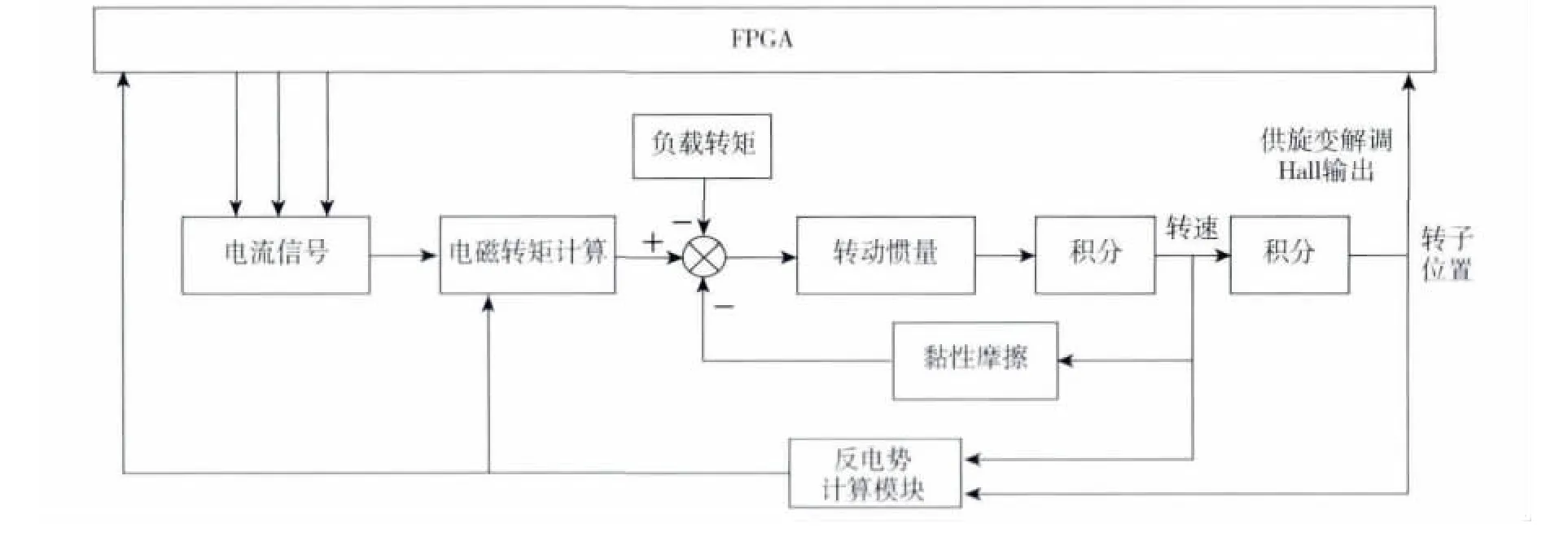
图4 DSP算法原理图Fig.4 Diagram of DSP algorithm
1)根据FPGA输入的电流信号和已计算的反电势,通过电磁转矩方程计算得到电机电磁转矩;
2)根据运动方程计算得到转子角加速度;
3)对转子角加速度进行一次积分,得到电机转速,并将电机转速乘以电机反电势系数得到反电势并输出给FPGA;
4)对转子角加速度进行二次积分,得到电机转子位置并输出给FPGA.
此外,DSP软件还负责电机及负载模拟单元与控制计算机的网络通信功能,接收控制计算机发送的工作参数及负载力矩,输出电机模型计算结果.
3.2 FPGA软件设计
FPGA软件主要负责电机绕组电流计算和各类接口电路的输入输出,按功能可划分为初始化及自检模块、相电压采集模块、绕组电流计算模块、Hall信号模拟模块、旋变信号模拟模块、双口RAM控制模块等.
FPGA中算法流程图如图5所示.FPGA根据对功率PWM电压的高速采样结果,采用前向欧拉法对电压方程进行快速求解,实时得到各相电流值,其中电阻、电感和反电势信号均通过双口RAM从DSP获取.绕组电流值一方面输出给DSP参与计算,另一方面在经过DAC变换后输入到可控电流源中,由可控电流源产生三相绕组电流,并输出给移动控制驱动组件进行负载功率模拟.同时FPGA还通过I/O端口输出Hall信号和旋变正余弦信号,以满足控制驱动组件测试电性闭环需求.如图6所示,FPGA根据电机位置信号,查询换相真值表,输出3路Hall方波信号给控制驱动组件.如图7所示,FPGA采集旋转变压器激励信号,根据转子位置信号查表得到旋转变压器正余弦信号,经过D/A转换输出给控制驱动组件.
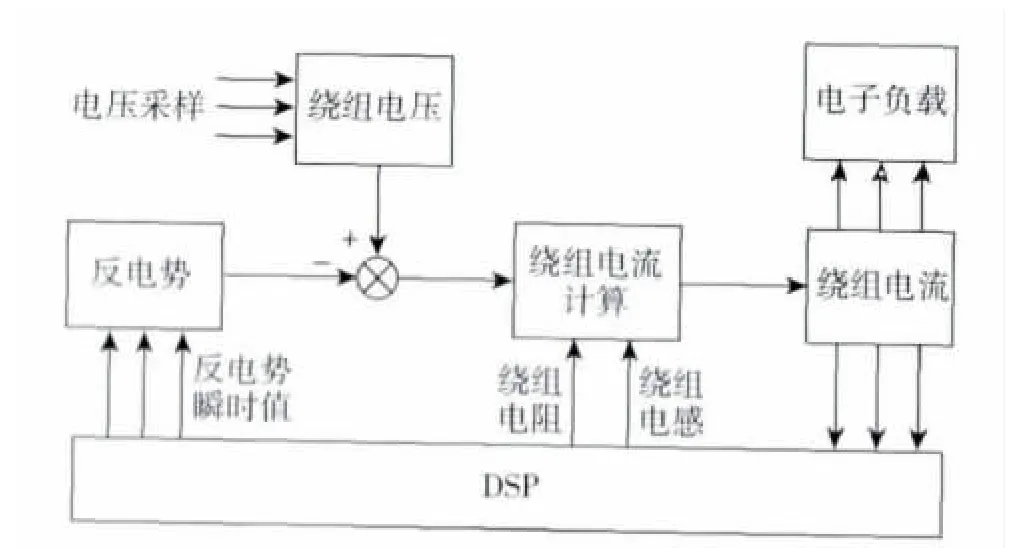
图5 FPGA中的电流计算原理图Fig.5 Current calculation in FPGA algorithm

图6 Hall信号输出原理图Fig.6 Hall signal output
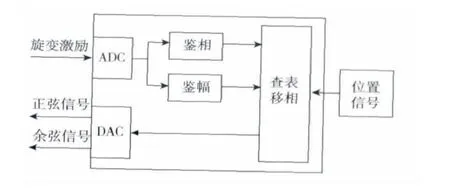
图7 正余弦信号输出原理图Fig.7 Output of rotating resolver signal
4 实际应用与验证
根据本文提出的设计方法成功研制移动系统模拟器,实现了对移动系统电机及负载的功率级模拟.经测试该模拟器电压采样频率达到30 MHz,采样精度达到0.02 V,电流输出频率达到1 MHz,输出负载变化率达到1.5 ×10-6A/s,电流输出延迟小于0.5 μs,电流输出精度达到0.005 A.
应用该移动系统模拟器,在月面巡视器的控制分系统测试过程中,对移动控制驱动组件的功能性能进行了测试,验证了移动控制驱动组件控制算法的有效性及变负载时的驱动能力,提高了系统测试覆盖性,降低了在轨风险,同时大大提高了工作效率,对型号任务的顺利完成发挥了重要作用.
5 结束语
本文根据月面巡视器控制分系统移动控制驱动组件的测试需求,给出了一种嵌入式月面巡视器移动系统模拟器的设计方案,实现了对移动系统电机及负载的功率级模拟,其精度及实时性较好地满足了系统测试需求.模拟器采用模块化设计思路,具有良好的可扩展性和维护性.
本项目的关键技术及原理可推广应用于多种参数、构型的直流无刷电机及其负载的模拟,以及对电机控制驱动器的功率级闭环测试,一方面可为电机及其机构设计提供依据,另一方面可为电机驱动控制器的考核验证提供测试平台.
[1]BRACKER J,DOLLE M.Simulation of inductive loads[C]//IEEE International Symposium on Industrial Electronics.New York:IEEE,2007:461-466.
[2]RYU H M,KIM S J,SUL S K,et al.Dynamic load sim-ulator for high-speed elevator system[C]//Power Conversion Conference.New York:IEEE,2002:855-889.
[3]HEWSON C R,ASHER G M,SUMNER M.Dynamometer control for emulation of mechanical loads[C].Industry Applications Conference. New York:IEEE,1998:151-1518.
[4]黄清军,邹云屏,吴振兴,等.模拟直流电机的电力电子负载研究[J].电源学报,2011(6):20-24.HUANG Q J,ZOU Y P,WU Z X,et al.Study on power electronics load in DC motor simulator[J].Journal of Power Supply,2011(6):20-24.
[5]李宗帅,董春.国外基于电动技术的机械负载模拟的现状[J].机械,2007,34(3):1-4.LI Z S,DONG C.Actuality on mechanical loads emulation basing on electric powered technology abroad[J].Machinery,2007,34(3):1-4.
[6]焦宗夏,华清,王晓东,等.负载模拟器的评价指标体系[J].机械工程学报,2002,38(11):27-34.JIAO Z X,HUA Q,WANG X D,et al.Estimation for performance of load simulator[J].Chinese Journal of Mechanical Engineering,2002,38(11):27-34.
[7]任国海,陈琢,杜鹏英,等.磁粉制动器对异步电动机机械特性的测量[J].电机与控制学报,2006,10(3):275-277.REN G H,CHEN Z,DU P Y,et al.Measurement for mechanical characteristics of asynchronous motors using electromagnetic brake[J].Electric Machines and Control,2006,10(3):275-277.
[8]刘志刚,和敬涵.基于电流型PWM整流器的电子模拟负载系统研究[J].电工技术学报,2004,19(6):74-77.LIU Z G,HE J H.Design and realization of energy feedback type electronic power load based on currenttype PWM rectifier[J].Transactions of China Electrotechnical Society,2004,19(6):74-77.
[9]张炳达,姚剑锋.基于PWM技术的功率负荷模拟器[J].电力电子技术,2006,40(4):111-113.ZHANG B D,YAO J F.Power load simulator based on PWM[J].Power Electronics,2006,40(4):111-113.
