一种踝关节康复装置的设计
2014-05-03吴俊鹏李日辉李雅宁高金武蒋乐伦
吴俊鹏,李日辉,李雅宁,高金武,蒋乐伦
中山大学 工学院,广东 广州 511400
一种踝关节康复装置的设计
吴俊鹏,李日辉,李雅宁,高金武,蒋乐伦
中山大学 工学院,广东 广州 511400
本文介绍一种踝关节康复装置,主要从足底压力检测单元和电机控制单元两部分来介绍装置的硬件组成与设计。采集单元采集控制需要的各项参数给控制器,构成一个闭环控制系统,使得装置能按照预先设定好的康复模式带动足部进行康复训练,达到控制病患踝关节进行康复训练的目的。
踝关节康复装置;足底压力检测单元;电机控制单元;康复模式
0 前言
踝关节扭伤是日常生活中常见的运动伤,踝关节损伤如果治疗不及时或者不彻底,容易导致踝关节韧带恢复不了原来的状态,使关节不稳定,易引起反复扭伤,甚至产生后遗症,情况严重的有可能影响行正常行走功能[1]。
目前,在国内关于踝关节的康复治疗中,依旧以治疗师的手工辅助康复为主,而使用踝关节康复装置来替代治疗师对患者实施被动运动训练,对减轻治疗师的人工劳动强度、及时使患者踝关节运动幅度和能力得到保持和恢复有重要意义[2]。在当前市场或医学上用于踝关节康复训练或治疗的设备中,主要包括简单材料和复杂仪器两种。简单材料如弹力绷带和泡沫塑料等轻型材料,其使用方便,价格较低,但康复的效果非常有限;复杂仪器如Biodex4多关节系统等,但系统针对性不强,且价格昂贵[3]。而足部矫形器主要用于预防运动损伤,维持足部的形态,保护关节[4],但对踝关节康复训练的针对性不强。
本文设计的踝关节康复装置是专门针对需要通过康复运动训练来恢复踝关节运动功能的患者而设计的,使用者的足部能够在装置的带动下,按照预先设定好的康复程序,进行单自由度(绕踝关节矢状面)康复训练。
1 踝关节生理特性简介
人体踝关节的运动能围绕3个互相垂直的轴心,沿三个互相垂直的平面的转动运动,如图1所示[5]。
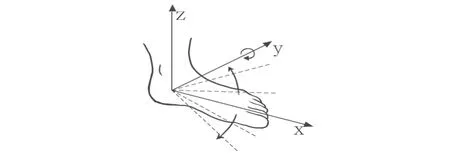
图1 踝关节运动
本文设计的踝关节康复装置只涉及踝关节单自由度的运动,即为图1中绕y轴转动的自由度。
人体踝关节的运动幅度有一定范围,因此装置进行康复训练的运动幅度必须在一定范围之内,否则容易引起使用者足部肌肉的拉伤甚至带来骨损伤。若以地面为零参考,在矢状面内足部运动的范围大约为-30°~30°[5],所以康复装置只能在该范围内转动。
人体踝关节运动的速度也有极限。踝关节角速度最大值为262.36°/s,最小值-343.01°/s[6],若康复训练过程中,装置带动足部的转速过高,会给使用者的足部肌肉、韧带等带来一定伤害。而装置带动足部转速过低,又不能满足人体康复训练的要求。所以康复装置的转速必须符合人体生理要求。
另外,研究表明,踝关节背屈峰力矩最大值约为30 Nm[6],而在康复训练中,装置遇到的踝关节的力矩会略小于该值,但力矩也必须满足在任何情况下都能够带动足部运动的约束条件。
2 踝关节康复装置的设计与控制
根据现有研究成果[7],设计的踝关节康复装置有2种运行模式:被动模式和半被动模式。所谓被动模式就是使用者的足部完全在装置的带动下进行踝关节康复训练,治疗师只需预先设定好装置摆动的各项参数范围(如定时,定量、定速、定范围等),即可让使用者进行单一不变的机械康复训练。半被动模式就是装置在预先设定好的各项康复参数下工作,运行过程中装置可实时检测出足部的运动状况和受力情况,根据这些信息动态调节各项康复参数,以分析出更适合使用者的各项参数范围。此模式适合第一次使用该康复装置或者需要制定新的康复训练计划的人。装置运行模式的选择可手动输入至控制器,并由控制器执行。
为完成上述功能,设计的踝关节康复装置包括永磁直流力矩电机、电机控制单元、足部机械装置、足底压力检测单元、采集单元及控制器。装置总体的结构框图如图2所示。
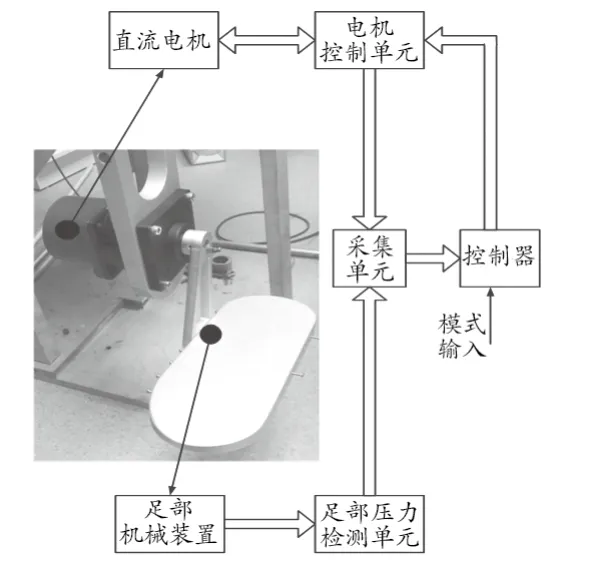
图2 踝关节康复装置总体结构
采集单元分别采集来自足底压力检测单元和电机控制单元的参数信息,并将信息传送给控制器,控制器再根据输入模式的选择、通过电机控制单元控制电机运转。其中足底压力检测单元检测安装在足部机械装置上的薄膜压力传感器的压力信息,电机控制单元通过检测与电机相关的电流、转速信息实现电机的转速、位置以及力矩控制。
2.1 足部压力检测单元
在半被动模式中,需要根据人体足底的运动状况来动态调节装置运行参数,而人体足部的运动状况由足底压力检测单元采集压力信息,返回给控制器进行判断。足底压力检测单元主要由多个薄膜式压力传感器组成,结构框图如图3所示。

图3 足底压力检测单元结构框图
所采用的薄膜式压力传感器厚度极小,置于装置底部时,使用者基本不能感知它的存在,且对力的分辨率达到±0.5%。传感器阻值与作用的压力大小呈线性关系[8]。压力检测电路对每个传感器采用电压分压原理,测量传感器在不同受力情况下的电压大小,由分压公式:
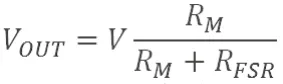
可求得与每个传感器与压力相关的电压大小,其中RFSR为传感器电阻值。采集单元通过多路复用芯片,对各个传感器进行电压数据采集。基于该策略,传感器反映的与压力相关的电压数据,被传送到控制器里进行分析处理。在控制程序里,为每个位置的压力传感器的采样数值设定一个阈值,当采集到该位置的传感器数值超过设定的阈值,则认为足底在该位置与装置发生了明显压力行为,否则认为没有明显接触。通过组合所有位置的压力传感器的量值信息来判断足部的运动情况,控制器再根据判断的结果实时动态地调整控制装置的运行参数。
2.2 电机及电机控制单元
根据以上人体踝关节生理信息的分析,设计的踝关节康复装置选用永磁直流力矩电机,其峰值堵转电压和电流分别为27 V和7.4 A,峰值堵转转矩达到28.8 Nm,足以在康复训练中带动和制止踝关节运动[7],最大空载转速经减速器减速后约为1 r/s,即360°/s,满足踝关节最大角速度[6]。
电机控制单元由PHB光电编码器、电机电流检测电路、H桥控制电路组成,结构框图如图4所示:
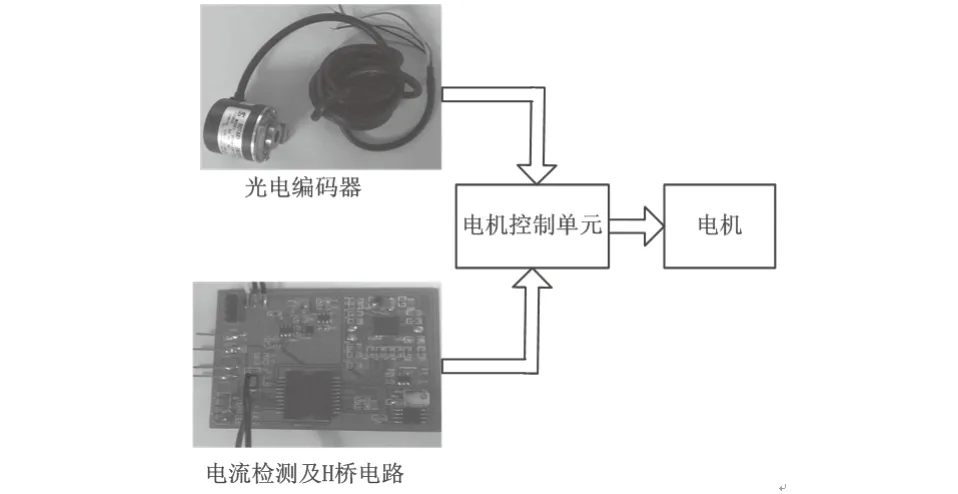
图4 电机控制单元结构框图
光电编码器的作用是检测直流电机的转速和位置。PHB增量式光电编码器安装在电机后方转轴上,直流电机每转动一周,编码器产生200个脉冲,电机控制策略单位实时采集编码器产生的脉冲,以计算频率f,根据转速计算公式:

得到电机的实时转速ω。另一方面,还需要根据脉冲的个数n,根据角度计算公式:
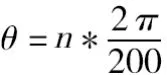
得到电机转动的角度θ。在被动模式下,控制器通过参数ω和θ来控制电机的转速和转角;在半被动模式下,参数ω和θ还用于动态调整电机的运转状态,以适应人体足部的动态状况。
整个电机及电机控制单元供电电压为24 V。电机控制电路用两路可调占空比的PWM波来控制H桥芯片工作,H桥芯片再将24 V电源按要求加在电机的两电源端,控制电机的工作。H桥的工作原理如图5所示。

图5 H桥芯片工作原理
控制器输出的两路PWM波为图5中的PWM1和PWM2,在其中一路正在输出PWM波时,另一路必定持续输出低电平,PWM波的频率初始化时可调,占空比D实时可调,控制器根据占空比和电压计算公式:

来控制输出的电压UAB,从而实现对电机的控制。其中,
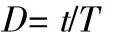
t为T周期内高电平时间。装置在运行过程中,可实时切换输出PWM波的通道,改变电机的转动方向。
为测量流过电机的电流,在24 V电源流入H桥芯片之前加一个微小阻值的电阻(R=0.01 Ω)。用电阻上的压降Ud来反映流过电机的电流的大小,此压降经过放大后,根据电流计算公式:
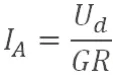
计算出流过电机的实时电流大小。其中,IA为流经电机的电流,G为后端信号放大倍数。由直流电机转矩公式:
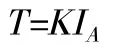
可知转矩大小T与流过电机的电流大小IA成正比例关系,其中K为电机转矩常数。因此,可通过调节IA来控制电机转动过程中转矩的大小。
总的来说,无论在被动模式还是半被动模式中,控制器都必须控制电机按照控制程序里的参数进行运转。采集单元负责采集IA相关的数据信息、光电编码器产生的脉冲信息和足底压力传感器的压力信息,传送给控制器进行计算和分析处理,得到IA、θ、f、ω的数值以及足底的运动状况,控制器再根据这些参数产生的相应PWM波来控制电机转动和工作。
3 装置初步试验结果与分析
电机控制单元作为设计的踝关节康复装置的执行机构,其转速和电流检测模块的精度直接影响到装置最终的控制精度。当电机工作在空载状态时,由直流力矩电机的转速计算公式:

可知,电机的实时转速ω1与电机两端的电压U1成正比,其中ω0、U0分别为直流电机的额定转速和额定电压。结合式(1)和(2),得到:
即频率与占空比成正比例关系。实验测得占空比D从10%增加到99%(每次递增10%)时对应的频率f (Hz)变化(每次测量5组数据取平均值)曲线如图6所示。实验数据表明,装置实际的占空比与频率成正比例关系,与理论分析的结果一致,说明装置的转速测量是准确的。
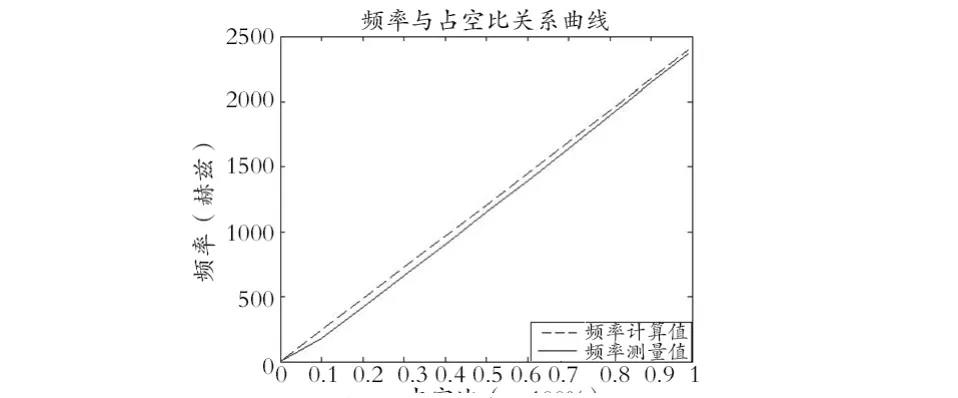
图6 占空比与频率关系曲线对比
当电机工作在堵转状态时,有:
其中L为电机电枢电感,r为电枢电阻。由此可计算出流过电机的电流i(A),并与装置测量的电流IA做比较,结果如图7所示。结果显示,当电流比较小时,计算值会比测量值能够保持一致,偏差较小;当电流比较大时,测量值和计算值存在一定的偏差,但从偏差值与实际值的比例来看,两者最大的偏差在10%以内,因此装置的电流检测与理论分析是一致的。电机转速和电流的有效检测,为踝关节康复装置执行机构的高精度控制奠定了基础。
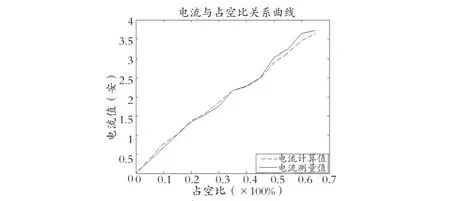
图7 电流计算值与测量值曲线对比
足底压力信号采集单元结构简单,实际测试证明,能够精确地检测足底各个部位的压力信号,从而满足装置对足底压力检测功能的要求。
4 结论
本文设计的足部康复装置使用方便,能以精准的电子机械控制代替人工劳动,在踝关节矢状面(单自由度)内对使用者的足部进行康复训练,有效减轻康复医疗人员的劳动强度。装置可实现被动和半被动两种康复模式,康复训练涉及的各项参数既可按医生诊断信息进行设定,又可以在康复训练中根据使用者的足部信息不断进行反馈调整,提高康复训练的准确度,使患者足部得到更有效、更科学的康复治疗。
[1] 姚太顺,孟宪杰.踝关节外科[M].北京:中国中医药出版社,1998.
[2] 曾世龙,姚立纲,郭晓宁,等.踝部关节与足部运动关系分析及其在脚踝康复装置中的应用[J].机械设计与研究,2013,(增刊):244-248.
[3] 魏晨婧,蓸学军.足部矫形器在下肢运动损伤中的应用[J].中国康复理论与实践,2010,16(1):37-39.
[4] 刘更谦,高金莲,杨四新,等.踝关节康复训练并联机构构型及其运动学分析[J].机电产品开发与创新,2005,18(5):13-15.
[5] 王向东,刘学贞,仰红慧,等.中国青少年踝关节跖屈、背屈肌群力量的研究[J].中国运动医学杂志,2003,22(6):569-572.
[6] 陆银春,朱国兴,邓乐增,等.多种工作模式的踢关节活动器的研制[J].医疗卫生设备,2006,7(12):74-75.
[7] sFSR® Force Sensing Resistor® Integration Guide and Evaluation Parts Catalog[S].
A Design of Ankle Rehabilitation Device
WU Jun-peng, LI Ri-hui, LI Ya-ning, GAO Jin-wu, JIANG Le-lun
School of Engineering, Sun Yat-sen University, Guangzhou Guangdong 511400, China
A series of study have shown that targeted and scientifc rehabilitation are more effective to the recovery of sick foot. This paper mainly introduces the hardware components of an ankle rehabilitation device, which mainly consists of two parts, a plantar pressure detection unit and a motor controlunit. It is such a closed loop control system that the acquisition system constantly detects and transmits some necessary parameters to the controller, which driving the device follow the pre-setting rehabilitation model and ultimately achieving the goal of regulating sick foot rehabilitation training.
ankle rehabilitation; plantar pressure detection unit; motor control unit; rehabilitation model
R496
A
10.3969/j.issn.1674-1633.2014.03.003
1674-1633(2014)03-0008-03
2013-12-14
教育部博士点基金新教师基金项目(No: 20120171120036);大学生创新训练计划(1055813028)资助。
