多路况下汽车防碰撞及行人保护预警系统设计
2014-05-02刘树峰吕钊钦
刘树峰,吕钊钦
山东农业大学机械与电子工程学院,山东泰安 271018
在各国事故的类型调查中发现,引起交通事故的最主要原因是由于机动车驾驶人失误,其在各种事故中的原因中所占比例高达80%~90%,在我国所占比例达到95%以上[1];汽车的正面追尾碰撞和侧面碰撞占交通事故的90%以上。为解决传统研究中将汽车纵向[3]和横向[4]分开研究,造成系统冗余复杂,和未考虑不同路况条件对汽车防碰撞系统影响的问题[5-7],本设计对汽车防碰撞[5]和行人保护进行综合的研究。从主动保护入手,设计基于毫米波雷达和超声波测距雷达的纵向防碰撞、横向行人保护以及转弯过程预警保护综合系统。
1 系统组成和工作原理
1.1 系统组成
多路况下汽车防碰撞及行人保护预警系统主要包括以下几部分,如图1:测距雷达收发模块:端收回波信号,完成雷达信号的发送和接收。数据采集调制模块:实时的采集回波信号,并且进行相应的数模转换,以供信息处理系统的使用。信息处理模块:即微处理器控制单元,接收来自数据采集调制系统的信息,并且进行数据分析,从而判断行驶安全性。声光报警显示模块:分为声音报主要是两种测距雷达,即毫米波测距雷达、超声波测距雷达,雷达产生所需的波频信号,通过接收警和灯光报警,根据不同的安全情况,进行不同报警,并且对相应信息进行显示。辅助制动模块:控制汽车电子制动器、离合器等,在紧急情况下辅助驾驶员制动汽车,同时安全带预紧装置工作,保护驾驶员。传感器感知模块:通过汽车转向系统传感器,油门踏板位置传感器,制动踏板位置传感器,以及温度,速度等传感器综合感知汽车行驶状态,从而减少误警率和虚警率。路况选择控制模块:主要包括系统开关和路况模式选择开关,控制系统开闭和不同路况模式的选择,以及输入键盘进行路况控制。

图1 系统组成框图Fig.1 Block diagram of system

图2 系统原理图Fig.2 Principle diagram of system
1.2 工作原理
根据不同路况下的附着系数建立不同汽车安全距离模型,选择相应路况的距离安全模型,在正面防碰撞中采用毫米波雷达对前方车辆距离、速度差等进行测量,一般状况下,声光系统预警,提醒驾驶员,紧急状况下,能够进行紧急辅助制动。在侧面安全保护中,主要利用超声波测距雷达对汽车两侧驾驶员视觉盲区的行人、车辆等障碍物进行监测,特别是在汽车转弯过程中实时测量汽车内轮差内的障碍物,及时提醒驾驶员,并采取一系列紧急措施。通过汽车转向系统传感器,油门踏板位置传感器,制动踏板位置传感器,以及温度、加速度等传感器综合感知驾驶员驾驶状态,从而减少误警率和虚警率。系统在较高车速下才工作,较低车速时自动关闭。结构如图2。
2 控制系统
主要由毫米波测距雷达和多个超声波测距传感器组成的测距电路、数据调制电路、主控制电路、报警显示控制面板电路以及辅助制动电路组成,如图3。
报警显示控制面板主要由显示器、报警蜂鸣器、报警LED灯、模式选择开关等组成,来完成系统的主要数据分析控制,主从机之间的数据通信以及报警、显示和模式选择功能。并且接收车速、制动踏板位置等传感器的信号,进行分析处理,实时监控汽车行驶状态。当从机发来测距数据,主机计算之后做出相应操作。紧急情况下,控制安全带收紧、辅助制动装置辅助驾驶员控制车辆。
3 软件系统与距离模型建立
3.1 系统主程序模块
首先调用初始化模块和路况选择模块,完成系统的初步设置。根据不同的情况完成不同行驶状态下的全方位主动保护,并在显示面板上显示相关行驶环境数据,主程序流程如图4。
3.2 系统防碰撞程序与纵向安全距离模型建立

图3 报警显示控制面板电路图Fig.3Alarm display control panel circuit diagram

图4 系统控制主程序流程图Fig.4 System control flow chart of main program
3.2.2 纵向安全距离模型建立 选取四种最具代表性的路况模式,即:正常路况模式、雨天路况模式、冰雪路况模式、山地路况模式。不同路况模式下路面附着系数φ、安全距离补偿Sc取不同值。建立系统的安全距离计算公式:

式中:t1为系统反应及动作时间(s);t21为汽车减速度线性增长时间(s);t22为持续制动时间(s);,Vo为汽车与前方障碍相对速度(m/s);Φt为不同路况上的路面附着系数。

式中:ta为报警提醒驾驶员时间(s);t12为驾驶员反应时间(s)。
3.3 系统弯道及侧面保护程序与安全模型建立
3.3.1 弯道及侧面保护程序模块 传感器判断汽车的行驶状态,选择调用侧面保护程序或者弯道保护程序,采用超声波测距传感器对汽车内轮差、盲区形成危险区域内的车辆行人距离进行测量,当距离小于安全距离时,声光系统预警,提醒驾驶员。传感器实时测量与汽车周围距离情况并显示。汽车转向系统传感器感知驾驶员驾驶状态,温度传感器修正超声波测距,从而提高系统的准确率,程序如图6。
超声波测距探头安放位置在汽车两侧对称分布。共安装四个超声波测距探头,编号分别为L1、L2、R1、R2,L1、R1分别安装于汽车的车头前部左右后视镜的下侧,L2、R2安装于汽车驾驶室的后下部的左右两侧。
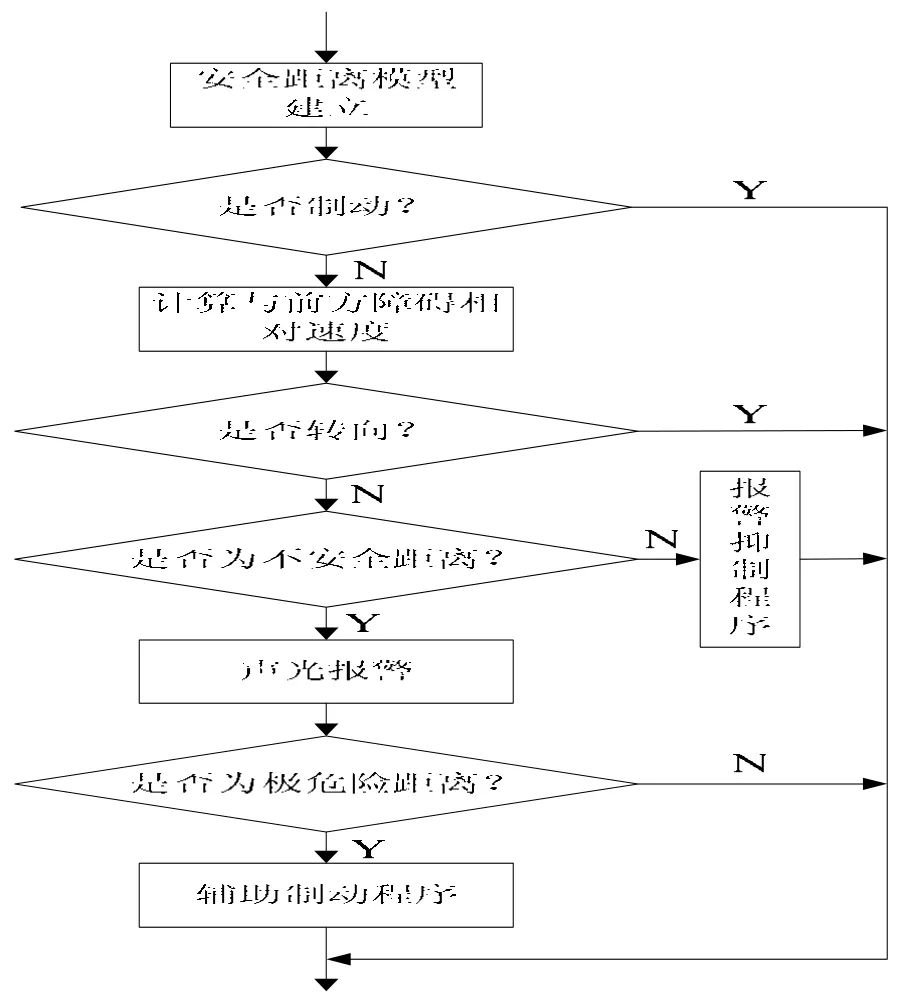
图5 系统防碰撞流程图Fig.5 System anti-collision flow chart
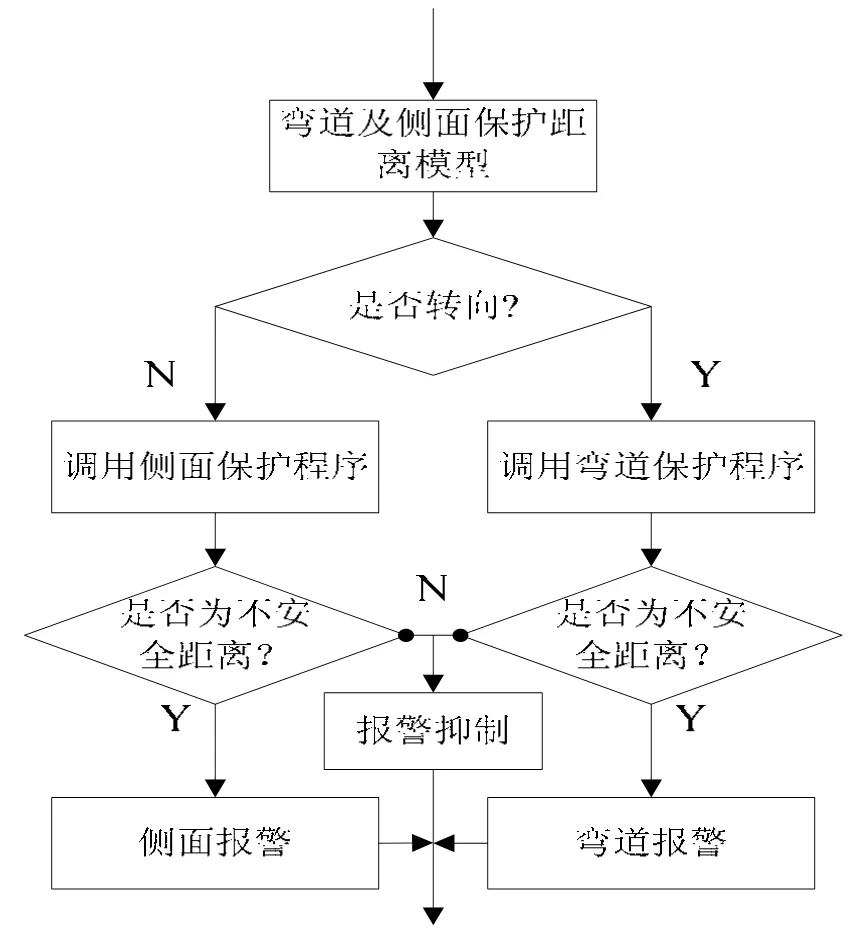
图6 系统弯道及侧面保护流程图Fig.6 Corners and side protection system flow chart
3.3.2 弯道保护预警距离建立 根据不同汽车的轴距和轮距建立安全距离模型,方向盘角度传感器判别汽车转弯方向,计算出汽车最大内轮差,将最大内轮差作为弯道保护安全距离。
预警距离数学模型:根据内轮差的定义,最大内轮差m,弯道安全距离Sc等于最大内轮差m,所以:

式中:r为汽车最小转弯半径(m);l为汽车轴距(m);d为汽车后轮距(m)。
针对传统训练方式的不足,基于虚拟现实技术的培训方式受到了广泛关注。基于虚拟现实技术,程伯文等人开发了林木联合采育机虚拟训练系统,用于林木采育机的仿真训练[2]。张晓曦等人开发了工程船克令吊交互仿真系统用于克令吊操作人员的实操训练,解决了传统训练方式周期长、成本高且安全风险大等问题[3]。史艳楠等人开发了矿井提升机虚拟实训装置,用于矿井提升机的操作训练[4]
3.3.3 侧面保护预警距离建立 参照《中华人民共和国道路交通管理条例》第四十九条中关于机动车会车的规定及《公路工程技术标准》等数据要求得到的侧向最小安全间距:

式中:V1为自车速度(m/s)。侧面预警保护中左右安全距离相同。
安全距离仿真如图7、8。

图7 正常路况下纵向辅助制动距离仿真Fig.7 Longitudinal assisted braking distance simulation under normal road condition

图8 正常路况下纵向报警提醒距离仿真Fig.8 Longitudinal distance alarm to remind simulation under normal road condition
4 系统试验及调试
4.1 PCB电路板设计与硬件调试
控制系统分为两部分:主机部分和从机部分。主机部分主要由显示电路、报警电路、路况选择电路、多种传感器及相关电磁兼容保护电路等组成。从机则由测距传感器、AD转换电路和与主机的通信电路等组成。
首先,对系统初始化模块、系统主程序模块、路况选择程序模块、报警抑制程序模块、键盘输入和显示处理模块、声音灯光报警模块和各种传感器控制程序模块分别进行硬件检测。之后,采用Keil软件仿真程序,查看变量和寄存器显示窗口,检测输入和输出结果。同时利用MATLAB对安全距离模型进行仿真。
4.2 整车调试
在完成各个分模块的调试之后,进行整车调试。测距雷达实时检测汽车行驶环境,根据不同的安全情况进行相应的操作。完成了对汽车安全距离模型的的参数测定和检验。由于通过实际驾驶的整车调试数据不易获得,故通过静止试验车辆,采用不同速度移动的汽车和行人来代替汽车行驶过程中障碍物,来检验系统的可行性;设置不同的路况行驶参数,来模拟检验不同行驶路况下的汽车安全距离。通过整车调试,能对不同距离障碍物采取不同措施,并能够根据不同路况建立不同的安全距离模型,如图9。
系统试验参数,如表1。正常路面和冰雪路面对比如表2所示:通过实车试验,在正面纵向碰撞中,选取几组试验数据与安全距离仿真数据进行对比,相对误差皆在7%之内。

图9 整车调试及显示面板硬件Fig.9 The hardware of vehicle debugging and display panel

表1 系统试验参数Table 1 Parameters of system test

表2 正常路况和冰雪路况下安全距离仿真及试验数据Table 2 Safety distance simulation and experimental data under normal road condition and snow road condition
5 结论
(1)将汽车横向和纵向主动保护结合起来,提高控制的效率。对汽车正面的碰撞在不安全情况对驾驶员提醒报警,非常危险情况下能够进行辅助制动,减少制动距离,保证车辆的安全;对汽车侧面以及驾驶盲区的行人、车辆能够进行预警,避免侧面的刮擦;在汽车转弯过程中,能够对汽车转弯半径内的障碍物进行监测,保证汽车转弯安全,避免转弯刮擦、碾压事故的发生。
(2)通过多种传感器监测驾驶员的驾驶行为,理解驾驶员的驾驶意图,减少系统的虚警率和误警率。系统的路况选择模块针对汽车行驶的不同路况进行选择,建立不同的安全距离模型,最大限度的减少碰撞事故的发生,保证汽车行驶安全。
[1] 丁正林,郑 煜.交通事故深度调查分析对我国交通安全研究的启示[J].中国公共安全·学术版,2010(1):86-90
[2] 吴 勇,刘新荣.快速路路段类别事故率与交通流状态关系[J].中国公路学报,2013,26(03):150-157
[3] 李晓霞,李百川,侯德藻,等.车辆追尾碰撞避免技术[J].西安公路交通大学学报,2001,21(2):94-97
[4] Joo-Han KIM,Zeungnam B.A Study on Active Collision Avoidance System for the Road Vehicle[J].IEICE transactions on information and systems,2001,84(6):717-726
[5] 杨凯和.基于毫米波雷达的汽车主动防撞预警系统信号分析与处理[D].长春:吉林大学,2011
[6] 李 朋.汽车主动防撞系统控制模式的研究[D].南京:南京航空航天大学,2012
[7] 刘 刚,侯德藻,李克强,等.汽车主动避撞系统安全报警算法[J].清华大学学报(自然科学版),2004,44(5):697-700
[8] Pawelec J.An information-communication system for early warning and collision avoidance in road traffic[J].Journal of Communications,2008,3(5):40-46
