智能移动水果采摘机器人的设计
2014-04-29冯光
冯光

摘 要 设计一种机器人,用来移动水果和采摘水果的智能产物。该机器人由尾端执行器、采摘机械臂、横向的移动机构、智能移动平台以及相关的控制系统组成,由C语言程序编写的控制程序,开发人机能够相互交流的界面。整个系统工作性能较为稳定,对成熟果实的正确识别率为81.5%,成功采摘率为87.1%,每个水果的采摘耗时平均为9.45s。
关键词 采摘机器人 机器视觉 移动平台 水果
中图分类号:TP242 文献标识码:A
0前言
历年来,水果生产中,水果采摘一直是最费力最耗时的环节之一,它所需全部生产过程的大约40%左右的劳动力。为了使更多的果农从复杂的采摘作业中得到充分的解放以及提高果实采摘的效率,一直都有很多国内外的专家以及学者专心投入对采摘机器人的实验和研究。
1工作原理与总体结构
1.1工作原理
该机器人在果园作业时是这样实现自主导航的:首先是主体控制器对由双目摄像机采集的果树行间的路面图像进行处理,通过分析得出导航路径,然后再由串口1收集DGPS位姿信号,将其与视觉导航信息进行融合,进而实现该机器人移动平台的自主导航。当机器人行进至目标果树位置时,主控制器将会发出使移动平台电机停止转动的指令,然后再通过RS232向采摘机械臂发出控制指令,使机械臂移动到各个图像采集位姿。当对果树的图像采集完成后,主控制器还会对成熟果实进行识别和定位,然后通过RS232向末端执行机构发出指令,末端执行器便抓取果实。采摘完成后,各级机械臂回到导航初始位置,重复执行以上采摘作业。
1.2总体结构
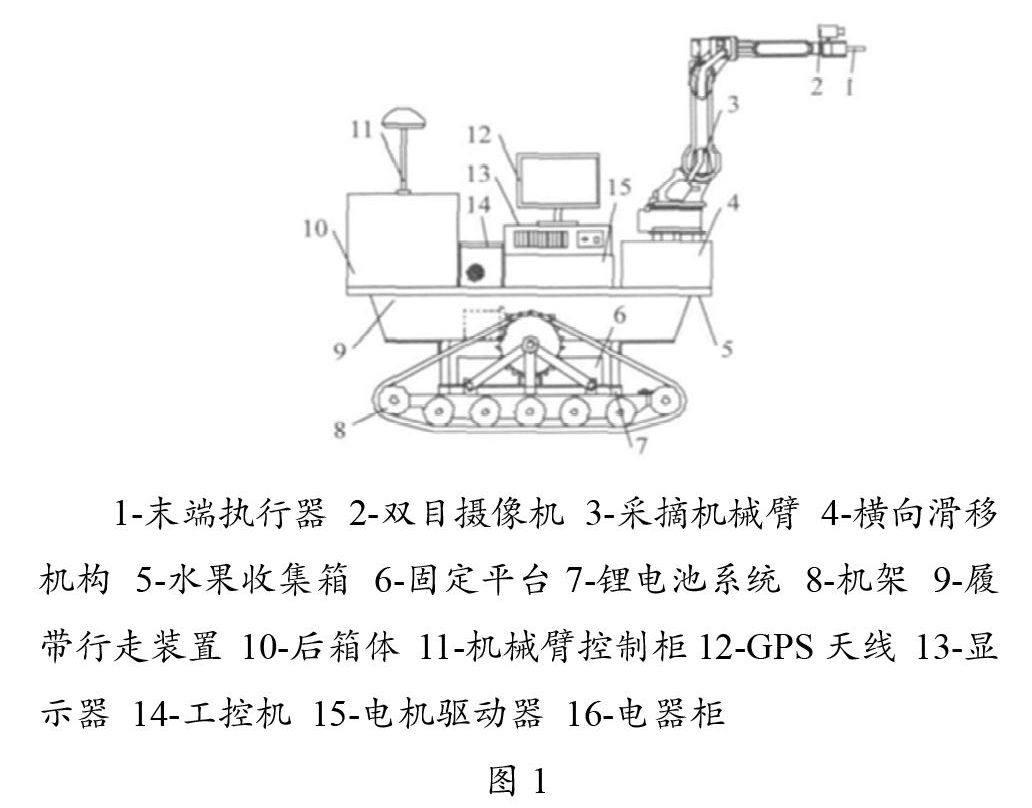
此次设计的机器人是履带式的,主要由控制系统及其机械执行系统组成。机械执行系统如图1所示,主要包括横向滑移机构,末端执行器,采摘机械臂,移动平台等。控制系统主要包括双目摄像机,数据采集卡,机械臂控制器,末端采集控制器,运动控制卡,GPS,1394转换卡,电机驱动器以及各传感器和各个控制电路等。移动平台包括固定平台,机架,履带式行走装置等。
2工作主要部件
2.1横向的滑移机构
在前期的实验过程中,发现果实的采摘有两种漏摘现象:(1)当果实与摄像机的距离低于0.85m时,摄像机不能准确的对果实进行立体匹配;(2)当机械臂基坐标系原点与果实距离超过1.75m时,果实将超出机械臂采摘范围。为此,我們设计了如图2所示的横向滑移机构,将机械臂底座固定安装在滑移机构的滑台上,使机械臂与果树之间的距离以及摄像机与果树间的距离均能方便调节,很好地解决了漏摘的问题。
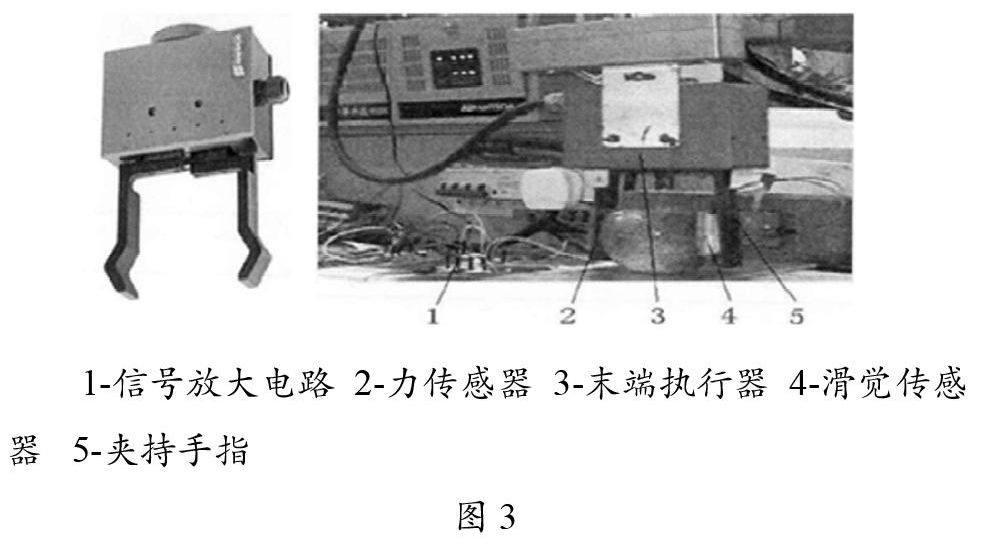
2.2末端执行器与采摘机械臂
末端执行器采用的是由德国SCHUNK公司生产的型号为EVG55HUB100的产品,其结构如图3所示。该执行器的抓取动作是由滑觉传感器和力传感器的信号决定的。
采摘机械臂采用的是由日本安川公司生产的MOTOMAN-SSF2000型的工业机器人。其额度负载为6kg,采摘半径为1378mm,度2403mm,机械臂底座距离地面的高度为1200mm。
2.3履带式的移动平台
为了可以准确获取障碍物的距离和行驶路径等信息,此次设计采用了减振性能较好的橡胶履带。为了避免钢制驱动轮与橡胶履带配合造成橡胶履带磨损过快的缺陷,驱动轮采用了超高分子聚乙烯材料。移动平台的行走装置采用了安川电动机来驱动,这种电动机只需改变驱动器设置,便可实现交流与直流间的供电切换,这样便减少了有些果园没有三相交流电的使用限制。
3机器的视觉系统
3.1果实的定位与识别
定位系统和果实识别的硬件主要由1394转换卡,双目摄像机和主控制器组成。先由摄像机采集果树图像,然后通过1394转换卡将采集到的果树图像传输到主控制器,在主控制器中采用各种图像处理算法对果树图像进行处理,从而识别出成熟的果实,解算出果实在机械臂基坐标系下的三维坐标。
3.2果实的图形采集
由于摄像机的视野有限,只采集一幅图片是不能对整棵果树进行覆盖的,所以采集图像时机械臂需要在多个不同的位姿进行采集。通过实验表明,大部分果树需要采集6幅图片方可覆盖。系统每采集一幅图,就会对果实进行识别和定位处理,并且对该图片中成熟果实的位姿信息进行保存,然后由上位机根据成熟果实的位姿信息对机械臂采摘路径作出规划。当一幅图像中的成熟果实采集完毕后,机械臂自行运动到下一个图像采集位姿,并重复以上图片的采集过程,直至6幅图片中所有被识别的成熟果实采集完毕。
4控制系统的设计
4.1硬件系统的设计
这个采摘机器人的控制系统主要由上、下位机控制器和传感系统等部分组成,该硬件的结构框图如图4所示。
4.2下位机和上位机的控制器
该控制系统采用的是上、下位机两层结构,下位机控制器包括:末端执行器控制器,机械臂控制器及移动平台控制器。上位机控制器采用研华IPC610-H型工控机,其主频为2.66GHZ,CPU为Core2双核。机械臂控制器由RS232与上位机控制器连接进行通信。末端执行控制器也是如此通信,该控制器用来控制末端执行器手指闭合和张开的位置与速度。移动平台控制器采用研华PCI1240U,该控制器通过PCI总线与上位机控制器,进行通信,该控制器能控制4个自由度,移动平台只要其中两轴即可,其他两轴可用来作为功能拓展。
4.3传感器的系统
传感器系统主要由滑觉传感器、力传感器、GPS和双目摄像机组成。摄像机采用的是Point Grey Research公司的bumblebee2型摄像机,其基线长120mm,焦距为3.8mm。
摄像机通过1394转接卡与计算机进行数据传输。GPS采用JAVAD公司所生产的机器,其接收机天线型号为GPS702-GG。该系统可实现精确测向和定位。滑觉传感器与力传感器的型号分别为FSR-406和FSR-402。
4.4软件的系统
整个控制系统软件是在VC++6.0中开发完成的,其程序设计流程如图5所示。
采摘机器人控制系统软件設计简述如下:(1)系统设备初始化。(2)主控制器首先通过1394转接卡采集双目摄像机所拍摄的路面图像,通过RS232采集GPS航向信息及位置坐标。然后主控制器对导航图像进行处理,并提取视觉导航参数。最后主控制器再根据GPS采集位置和航向信息以及坐标导航图像信息进行决策分析,进而实现移动平台的自主导航。(3)主控制器通过1394转接卡采集双目摄像机拍摄的果树图像,对成熟果实进行识别与定位。并将摄像机坐标系下目标果实的三维坐标转换到采摘机械臂的基坐标系下。再由主控制器根据果实位置坐标对机械臂采摘路径进行规划。(4)当机械臂运动到目标姿位后,主控制器通过RS232向末端执行控制器发出指令,是末端执行器抓取果实。(5)重复以上四个步骤直到机械臂采摘范围内的果实采摘完毕。(6)机械臂回到导航的初始位姿,并重复以上自主导航和自主采摘过程。
5采摘机械臂的路径规划
机械臂的路径规划是果实采摘的关键问题之一。这个智能采摘机器人针对果树生长状况及果枝分布的特点,采用了多段路径规划来完成了机械臂的运动控制。
如图6所示,XYZ为机械臂的基坐标系,O为坐标原点,F为果实中心,F? 为果实中心在XOY面内的投影。A、B、C、D分别为采摘机械臂处于不同位姿时其末端执行器的对称中心点。因为图像采集位姿在采摘之前就已经给定了,所以B点的坐标是已知的,D点的坐标可由双目视觉系统求得,故要完成整个路径规划,必须求出C点的坐标,设C点与D点之间的距离为L,试验中确定L的长度为0.5m,由以上已知条件可求得C点的坐标。
双目摄像机完成图像采集后,机械臂腰关节旋转至与Y轴夹角%a 处。。水果采摘时,机械臂在由点FOF?构成的平面内运动,考虑到机械运动的平顺性,A到B及B到C之间路径采用的是PTP圆弧插补方式的运动。C到D之间轨迹采用的是PTP直线插补方式的运动,末端执行器只在FOF?平面上作直线平移,这样对应果实采摘所需空间变小,末端执行器碰到的树枝等障碍的几率变小,从而保证了果实采摘的成功率。果实采摘成功后,先由D回到C,再有C回到果实收集箱的上方,然后末端执行器夹持手指松开,果实下落到收集箱内。
6结论
(1)根据果树智能化的采摘要求,设计了智能移动水果采摘机器人,该机器人具有结构简单,动作灵活等优点。(2)在VC++6.0中编写了智能移动水果采摘机器人系统控制程序,开发了人机交互界面。(3)整个系统将末端执行器,传感器系统,采摘机械臂,图像处理算法和移动平台等部分关键技术融合在了一起,实现了末端执行器摘取,机械臂运动,移动平台导航及水果装箱等关键动作的智能协调控制,从而真正实现了水果采摘的无人化与智能化。
参考文献
[1] 刘长林,张铁中,杨丽.果蔬采摘机器人研究进展[J].安徽农业科学,2008,36(13):5394-5397.
[2] 杨文亮.苹果采摘机器人机械手结构设计与分析[D].江苏大学,2009.
[3] 刘锐.水果采摘机器人视觉控制及其轨迹规划研究[D].南京农业大学,2010.
[4] 周俊,张高阳,刘锐,等.基于粒子滤波的苹果采摘机器人目标姿态估算[J].农业机械报,2011,42(3):161-165.
[5] 安秋.农业机器人视觉导航系统及其光照问题的研究[D].南京农业大学,2008.
[6] 李建平,林妙玲.自动导航技术在农业工程中的应用研究进展[J].农机工程学报,2006,22(9):232-236.
[7] 王友权.自主导航的农用移动平台的设计与路径跟踪设计[D].南京农业大学,2008.
[8] 张智刚.插秧机的GPS自动导航控制系统研究[D].华南农业大学,2008.