《自动控制原理(多学时)》课程中线性系统校正部分教学研究
2014-04-16刘桂涛白敬中
刘桂涛白敬中
(1.湖北工程学院计算机与信息科学学院,湖北孝感432000;2.中国市政工程中南设计研究院,湖北武汉430010)
1.引言
《自动控制原理(多学时)》是自动化专业的一门重要专业主干课,该课程的特点是其理论广、数学公式多、概念较难理解,具有一定的难度和复杂性,既与各专业前期相关的课程内容紧密相连,又与工程实践紧密相结合[1],因此该课程具有一定的学习难度和教学难度。
在《自动控制原理(多学时)》的教学中,线性系统校正部分占有较大的比重,内容较多,难度较大。本文针对《自动控制原理(多学时)》线性系统校正部分的教学,总结教学中常出现的一些问题,并提出相应的解决办法。
2.线性系统校正理论与实验教学现状
线性系统校正这部分内容用到了时域分析法、根轨迹法和频率响应法中的知识,而且数学形式比较复杂,比较难掌握。《自动控制原理(多学时)》线性系统校正部分可能引起学生理解困难的几方面问题如下:
(1)如何确定需校正系统的校正方式
当控制系统的性能指标不能满足要求时,就需要在对控制系统进行校正,使校正后控制系统的性能指标全面满足要求。但由于系统各不相同,性能指标要求的内容也不相同,加上学生没有校正系统的实际经验,造成学生面对各具体系统和具体性能指标要求时,不知道如何确定需校正系统的校正方式。
(2)未校正系统数学模型建立及简化
每个系统都有其相应的数学模型,但对已有的系统确定其数学模型,则需要有比较深的数学知识和实际经验,对本科阶段的学生而言这两方面都比较欠缺,大多数学生只能根据老师所讲解的几种系统数学建模方法去模仿相似系统的建模,而现实中系统各不相同,学生对不熟悉系统的数学建模多数会感到困难。另一方面,有的学生对系统建立了相应的数学模型,并求出了系统对应的传递函数,但不会对系统进行简化,使得已经建立的数学模型比较复杂,给系统校正带来许多额外工作。
(3)系统校正前后穿越频率的求取
系统未校正前,要求出穿越频率ωc,以便求出未校正系统的相位裕量γ,从而判断未校正系统的相位裕量是否满足要求,一般用近似方法求取,有些书籍上用MATLAB仿真求取,学生有时对近似法没有理解透,所以用近似法求取的ωc往往不准确。系统校正后的穿越频率ω'c求取没有固定的方法,学生有时不知道如何求取系统校正后的穿越频率ω'c。
(4)系统时域指标和频域指标的对应关系[2]
系统校正的指标要求一般是频域指标,有时还有时域指标,如果深入理解,还可以发现这些指标和根轨迹也有关系。例如二阶系统时域指标超调量σ%和频域指标相位裕量γ的间接关系有:100%,又如二阶系统时域指标调节时间ts和频域指标穿越频率ωc、相位裕量γ的关系有因此,可以看出,要将系统时域指标和频域指标对应关系弄清楚,需要学好时域分析法和频域分析法的基本知识及相关的数学知识。
产生上述问题的原因有多个方面,主要的客观原因有如下三点:①控制系统的校正除了要有较扎实的自动控制原理基本理论知识外,还需要有实际的工程校正经验,在校学生一般是没工程校正经验,因此对给出的未校正系统和提出的性能指标要求,学生有时难以确定采用何种校正方式。②控制系统校正方式确定后,就需确定校正装置的数学模型,由于建立校正装置的数学模型较难,所以教材上一般直接给出校正装置的数学模型,即它的传递函数,接下来如何确定校正装置的传递函数,则需要对控制系统的传递函数和各项性能指标进行深入分析和繁琐的数学推导,从面影响了学生对知识点的理解。③无论是教材中的校正举例还是实验中系统校正模拟,学生在接触较少,使学生误认为系统校正在实际生产和工作中没有多大应用价值,造成对这一部分内容的学习兴趣下降。
3.系统校正部分教学分析
对于上述教学中存在的问题,采用如下有针对性的教学方法进行改进。
(1)选择恰当的校正方式
如果需校正系统的条件和提出的指标要求是时域范畴时,如稳态精度、系统响应时间等,则一般用时域法来校正系统;如果需校正系统的条件和提出的指标要求是频率域范畴时,如相位裕量、速度误差系数等,则一般用频率域法来校正系统。
实际的系统校正一般采用频率域法来校正系统,频率域法校正又分串联校正、反馈校正、前馈校正等多种校正方式,由于反馈校正和前馈校正需要有实际工程经验,并且比较难和复杂,故在课堂教学中只作简要介绍。串联校正根据情况不同还可分为超前校正、滞后校正、滞后—超前校正三种,至于采用何种串联校正,则需根据已知系统的条件和提出的指标要求来确定。
(2)突出重点
系统校正的方式多,每一种校正方式又相当复杂,若逐一进行理论和举例讲解,不仅学时有限,而且学生的注意力可能会平均分散,不易抓住重点[3]。在教授系统校正时结合自动化特点和专业背景,在教学大纲的基础上对教学内容进行合理组织和优化,突出重点。
在控制系统校正讲解中,不介绍基于根轨迹的系统时域法校正,对于频率域法中的前馈校正和反馈校正也只作大体介绍。重点讲解频率域法中的串联校正,无论是串联超前校正、串联滞后校正,还是串联滞后—超前校正,都要重点讲解校正装置的传递函数及频率特性、系统校正的步骤、系统校正的具体举例,一定既让学生理解和掌握,又让学生理论联系实际。
(3)举工程实例
《自动控制原理(多学时)》课程与工程实际紧密相连,其系统校正部分内容和工程实际联系相当紧密,同时系统校正部分内容的理论性强,若在教学过程中强调其逻辑性及理论体系,而不和工程实例相结合,将会使其成为高深难懂的内容,学生的学习兴趣就会下降。在重点讲解串联校正后,便以转速、电流双闭环调速系统为工程实例,由浅入深地讲述系统数学模型的建立和简化,调节器结构的选择和参数的确定,这样有助于学生在具体工程实例中理解串联校正,将理论和实践的内容融会贯通。
4.教学实践
下面以串联超前校正为例[4],讲述控制系统校正教学的三步骤。
4.1 讲解理论知识
首先举出一个超前校正装置的实际模型图,由模型图得出它的传递函数,其中α>1,并画出其伯德图(图1):

图1 串联超前校正装置伯德图
由图可知:在ω=ωm处出现了最大超前相角。
由校正装置的传递函数得到相应的频率特性表达式,进而画出其奈奎斯特曲线图(图2):

图2 串联超前校正装置奈奎斯特曲线图
从奈奎斯特曲线图可知最大超前相角即为原点到曲线的切线与正实轴的夹角φm,并由图中几何关系可得到如下式子:

由得到的α,T,就能确定串联超前校正传递函数了。
4.2 举具体的例子
设某负反馈系统开环传递函数为,且H0(s)=1,试设计一个校正装置,使校正后系统速度误差系数Kv=100,相位裕度γ≥450。
解:(1)分析给定的系统和所要求的指标,选取合适的校正方式。
由于系统本身的相位裕量不大,但所要求的相位裕量较大,且稳定性能指标要求不高,故选取串联超前校正方式。
(2)确定系统的参数K0。

(3)系统校正前的伯德图L0(ω)和φ0(ω)(图3)。

图3 系统的校正前后及校正装置伯德图
相应地,其相位裕量为:

(4)确定最大超前相位角φm。

(5)计算校正装置参数α的值。

(6)在L0(ω)上找到幅值为-10lgα的点所对应的频率ωm,即校正后系统的穿越频率ω’c=ωm。解得:ωm=ω’c=40

(7)确定校正装置参数T及其传递函数。

相应地校正后系统的开环传递函数为:

(8)画出校正后系统的伯德图(见图3),系统校正后相位裕量γ'=450满足要求。
4.3模拟实验
(1)在模拟实验箱上连接还未校正的二阶系统的模拟电路(图4),并用数字示波器观测其稳态性能和动态性能(图5)。
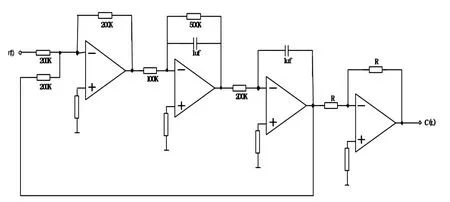
图4 校正前二阶闭环系统模拟电路图

图5 校正前二阶系统阶跃输入响应图
(2)按给定的性能指标要求,确定串联校正装置传递函数,进而确定校正后的模拟电路(图6)。

图6 校正后二阶闭环系统模拟电路图
(3)在模拟实验箱上连接加入校正装置后的模拟电路,并用数字示波器观测其稳态性能和动态性能(图7)。
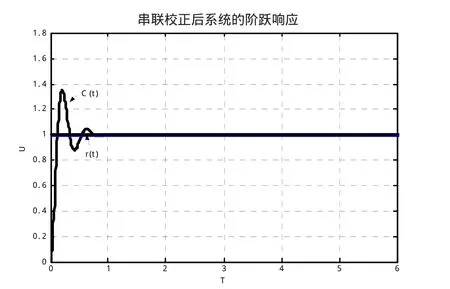
图7 校正后二阶系统阶跃输入响应图
(4)改变校正装置参数,对加校正后的系统进行调试,使校正后系统满足性能指标要求。
通过实验,使学生明白了系统加串联校正装置后能改变系统性能,并掌握了如何对系统进行串联校正。
5.结束语
虽然控制系统校正教学中存在一些问题,但通过对产生问题的原因进行分析以及采取了相应的教学实践措施,激发了学生的学习兴趣,提高了学生对控制系统进行校正的能力。通过近几年的教学实施效果及学生的反馈调查,《自动控制原理(多学时)》课程中线性系统校正教学取得了良好的教学效果。
[1]高春艳,庞靖等.“自动控制原理”教学改革关键问题探索[J].中国电力教育,2013,(13):79-80.
[2]胡寿松.自动控制原理(第六版)[M].北京:科学出版社,2013.
[3]丁世宏,杨年法等.“自动控制原理”课程的频域部分教学探讨[J].电气电子教学学报,2012,(3):106-108.
[4]黄坚.自动控制原理及其应用(第2版)[M].北京:高等教育出版社,2009.
