基于Matlab的六足机器人优化设计仿真
2014-04-16王伟伟
王伟伟 陈 锋
(上海海事大学 物流工程学院,中国 上海 201306)
0 前言
六足仿生机器人是指模仿六足生物的身体结构、运动形式以及功能特征的机器人。这种机器人同时具有足式和仿生机器人的优点,具有良好的运动控制、位姿调整以及信息融合等能力。此外,六足机器人具有丰富的步态,稳定性好、越障能力强,具有很好的地形适应能力,在国民经济和国防建设的许多领域中都有广泛的应用前景[1]。自20世纪60年代以来,国内外已经研制出许多这类机器人的模型或样机。
机器人系统是由结构系统与控制系统两个子系统组成的。这两个子系统相互影响,紧密耦合。因此,对两者进行集成设计十分必要。而实际情况中,结构设计者往往采用有限元动力分析方法设计结构,使得结构系统模型自由度很高,方程组的维数大,并且含有许多非线性项。这就造成控制设计者无法利用该模型,而只能根据特别简化的数学模型来对控制器系统进行初步设计。此外,由于简化模型是通过对实际系统进行大量简化得到的,使得模型中的参数不能跟实际情况很好地对应,所以控制结果也无法对结构设计进行有效的指导[2]。这种对结构与控制系统进行分离设计的方法会使得产品的研发周期长、成本高、性能差。
六足机器人是机电高度集成的系统,而系统的动态性能由结构及控制共同决定。在高性能轨迹跟踪过程中,结构和控制的耦合更加紧密。若在设计六足机器人的控制系统时未能考虑到它的结构特征,将会使跟踪误差偏大,甚至达不到性能要求指标;另一方面,若在进行结构设计时未能考虑到控制特性,将设计不出最优结构。为了使六足机器人系统设计达到最优,应该对控制和结构进行集成优化设计[3]。
1 六足机器人系统结构
1.1 整体结构布局
六足机器人主要由躯干、驱动器以及六条腿构成。所有的驱动器都采用舵机。在躯干部分安装六台舵机,通过钢丝绳分别驱动六条腿机构的跟关节来实现正反转。
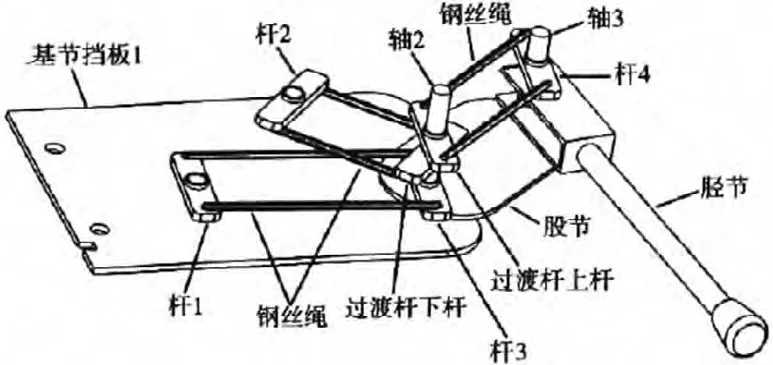
图1 六足机器人腿结构传动原理
1.2 腿机构及传动原理
在自然界里,很多昆虫的腿部结构是由基节、股节以及胫节三部分组成的。基节绕着跟关节转动,股节绕着髋关节转动,胫节绕着膝关节转动。这些转动都是单自由度旋转运动。整个腿结构属于一个三自由度的开式链结构[4]。六足机器人的运动主要由“跨步”和“抬放腿”两部分组成。
图1为六足机器人腿机构的内部结构图。杆1与杆2都是主动杆,它们分别与两台驱动器的输出轴连接。杆3和杆4是从动杆。杆3固结在股节上,杆4固结在胫节上。并分别在轴2和轴3位置形成转动副。 过渡杆由两根杆固结而成,且过渡杆的上、下两杆所在平面相互平行,两杆互成一定的角度。杆1和杆3在同一个平面上,杆2和过渡杆下杆处于同一平面,杆4和过渡杆上杆处于同一平面。杆1和杆3用一对钢丝绳连接起来,杆2和过渡杆下杆用一对钢丝绳连接起来;杆4和过渡杆上杆用一对钢丝绳连接起来。
当杆1逆时针旋转时,与杆3固结在一起的股节通过钢丝绳的传动,也开始作逆时针旋转。当杆2逆时针旋转时,过渡杆下杆通过钢丝绳的带动,也开始作逆时针旋转。由于过渡杆的上、下两杆固结在一起,所以,当过渡杆下杆逆时针旋转时,过渡杆上杆也逆时针旋转。并且上、下两杆的转角一致,从而带动与杆4固结的胫节旋转。这样,当杆1和杆2同时同向旋转时,股节与胫节也跟着作相同的转动。这样就实现了腿机构的“抬放腿”动作。
2 六足机器人运动学分析
六足机器人行走时,处于摆动相的各条腿类似于机械手臂,即从跟关节开始由依次串联的基节、股节和胫节构成[5]。所以要求各条腿的驱动关节和足端的关系,就要先确定各条腿节之间的相对运动与位姿关系。六足机器人的运动学正解就是在已知机器人躯体的位姿和各驱动关节的转角的情况下,求解足端的运动规律。
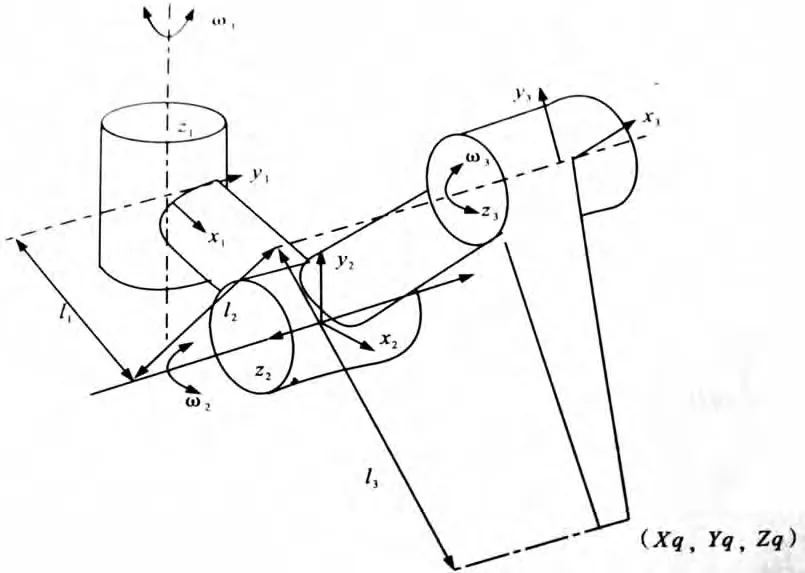
图2 六足机器人腿部的D-H坐标系
设 θ1、θ2、θ3分别表示跟关节、髋关节和膝关节的转角,I1、I2、I3分别表示基节、股节和胫节的长度。λ表示基节两部分的夹角;ai为腿节长度;ai为关节轴线的扭角;di为公垂线间的距离。
相邻坐标系之间的转换矩阵为:

选择跟关节处的坐标系为基坐标系,把相邻的关节变换矩阵相乘,即可得到六足机器人足端坐标系的转换矩阵:
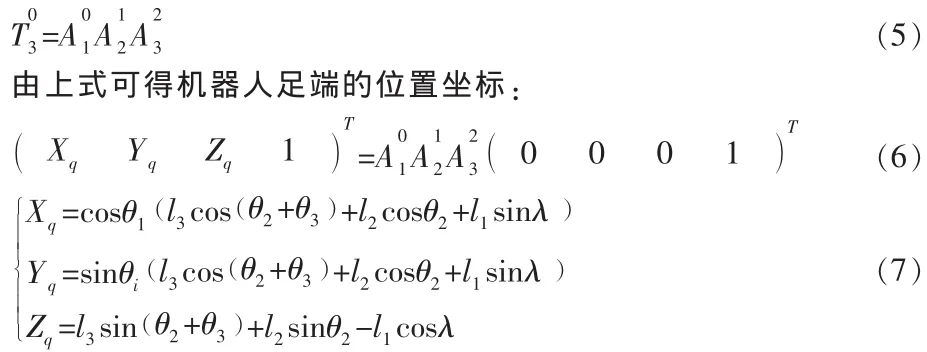
六足机器人的运动学逆解就是在已知机器人位姿的情况下求解各驱动关节的转角。这里,通过将逆变换矩阵左乘于方程两边的方法,把关节变量分离出来,从而求出关节转角。逆解的表达式为:
3 集成优化设计与数值仿真
3.1 集成优化流程与目标函数
为了使整体六足机器人系统设计达到最优,应该将结构与控制系统进行集成设计,即把结构优化和控制优化综合在一起,通过优选结构设计变量和控制设计变量以达到优化综合目标函数的目的[6]。

图3 六足机器人集成优化的流程
结构优化目标函数:

控制优化目标函数:

综合目标函数:

式中,α1、α2分别为结构和控制的加权系数, 满足条件 0<α1,α2<1,且 α1+α2=1。
3.2 数值仿真
设六足机器人足尖末端的运动轨迹为:

通过六足机器人运动学逆解,可以得到各原动件的输入变化规律。把原动件的运动规律输入至六足机器人系统动态方程,并利用遗传算法对六足机器人结构系统和控制系统进行分离优化设计求解。然后,进行集成优化设计求解,算法参数见表1。

表1 遗传算法参数
Matlab仿真结果输出:

图4 集成、分离设计的末端执行器X(左)、Y(右)方向跟踪误差对比
4 结论
(1)本文设计了一种六足机器人机构,并给出了整体机构的虚拟样机模型。
(2)根据D-H坐标变换对六足机器人进行了运动学分析。
(3)建立了六足机器人的集成优化模型。数值结果表明,集成设计的方法比分离设计方法能更好地进行轨迹跟踪。
[1]熊有伦,丁汉,刘恩沧.机器人学[M].北京:机械工业出版社,1993.
[2]訾斌,朱真才,曹建斌.混合驱动柔索并联机器人的设计与分析[J].机械工程学报,2011,47(17):1-8.
[3]张逸群,段宝岩,李团结.空间可展开天线展开过程轨迹与控制系统集成设计[J].机械工程学报,2011,47(9):21-28.
[4]阳如坤.全方位六足步行机器人分析—腿机构、运动学、静力学分析、步态规划与步行软件[J].机器人,1992(1):58.
[5]祝捷,曹志奎,马培荪.SMA驱动的微型双三足步行机器人作全方位运动的研究[J].传动技术,2002(4):11-15.
[6]李素兰,黄进,段宝岩.一种雷达天线伺服系统结构与控制的集成设计研究[J].机械工程学报,2010,46(19):140-146.
