基于卡尔曼滤波的红外目标局部搜索跟踪算法
2014-04-16郭张婷
郭张婷
(西安导航技术研究所,陕西 西安 710062)
0 引言
目前,红外成像系统的被动工作方面的明显优势已使其成为现代制导系统中的一项实用关键技术[1]。近年来,复杂背景下的红外目标探测与跟踪技术在军事、民事领域均获得了广泛应用,国内外专家学者对基于贝叶斯理论的各种算法也表现出了很高的热情,越来越多的研究人员将这类算法与现有的检测跟踪算法结合,以此提升跟踪的精度和准度。
1 KF算法
卡尔曼滤波是最佳线性滤波的一种,具体来说属于线性最优均方误差估计滤波器,并被广泛应用于导航、控制、传感器、数据融合、雷达系统等军事和民事领域。卡尔曼滤波理论是在克服了维纳滤波使用大量过去的数据,无法满足实时处理要求的基础上提出的一种合理有效的最优化自回归数据处理算法[2]。卡尔曼滤波(KF)对其需要求解的系统有如下要求:线性系统、高斯噪声、高斯分布的概率密度函数[3]。

上式为系统的状态方程,其中x(k)(N×1)为k时刻系统的状态向量,F(N×N)为状态转移矩阵,描述动态系统k-1时刻到k时刻状态的转移,v1(k)(N×1)为过程噪声。 公式(2)为系统的观测方程,其中为 k时刻系统的观测向量,H(M×N)为观测矩阵向量,v2(k)(M×1)为观测噪声向量。同时,v1(k)和v2(k)分别为相互独立的正态高斯白噪声,预测和更新公式如下:
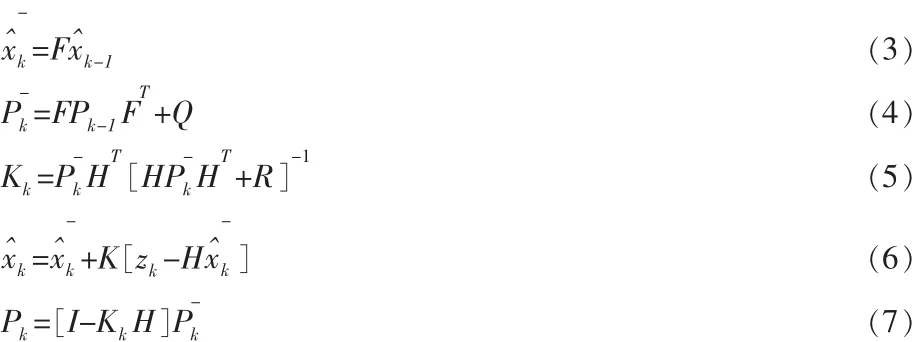
从上式中可以看出,卡尔曼滤波器的状态控制是通过递推和反馈实现的,不断的预测和更新,最终获得最优的线性滤波估计。卡尔曼滤波器(KF)是基于高斯分布的状态预测方法,能够实现最优的线性滤波估计。
3 分类背景预测
原始的红外视频图像经过边缘检测得到边缘图像、非边缘图像:边缘图像通过局部最相似算法获得边缘背景[4],非边缘图像通过四方向的最大均值滤波获得静态背景[5],预测背景由静态背景和边缘背景融合而成。该算法还包括一个预处理过程:全局搜索﹑图像分块和边缘检测三个部分,流程图1所示。
4 算法实现
在红外目标识别中,30像素值以下的目标统称为小目标[6]。无论目标的大小,由于红外热成像原理的特殊性,红外目标通常表现为本身红外热辐射强度较高且为灰度的奇异点。它们与周围背景部分的相关性较弱,在实际的监测跟踪过程中容易跟丢[7]。本文在分类背景预测算法的基础上利用卡尔曼算法实时预测更新,最终获得较为优异的跟踪效果:将第k-1帧的估计结果代入预测公式,获得第k帧的预测结果;以为中心点设置跟踪子框,具体尺寸由实际目标尺寸决定;在子框中进行分类背景预测,预测结果记为第k帧的观测值Zk;将第k帧的预测值和观测值代入估计公式,获得第k帧的估计结果。
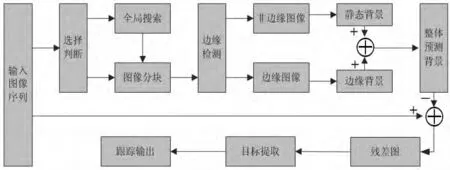
图1 背景预测流程图
5 实验仿真
5.1 场景设置
为了更好的验证算法性能,将本算法运用到实际采集的红外目标图像序列中,红外视频序列的采集均使用武汉高德的红外热像仪(TP8),IRV格式输出。红外序列每帧图像的大小为288×348像素,图像序列分别为复杂背景遮挡环境和行人环境。
5.2 仿真及结果分析
复杂背景且遮挡环境下红外目标图像序列的结果如图2所示,其中红色方形跟踪框为卡尔曼预测子框,红点为估计位置。此处给出了红外视频序列中第15帧、55帧、85帧、105帧、205帧、305帧的跟踪结果。从序列Ⅰ的处理结果可以看出:目标在第1到105帧的运动过程中受到了障碍物的遮挡,从105帧开始目标远离障碍物。本算法跟踪结果基本克服了遮挡问题,跟踪位置较为准确。
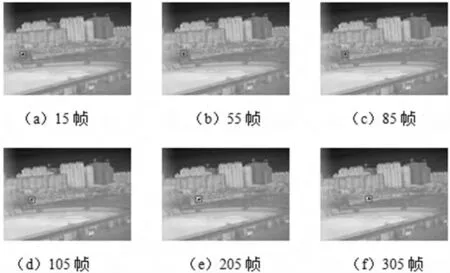
图2 复杂背景遮挡环境序列跟踪结果
行人环境下的红外图像序列的跟踪结果如图3所示:其中红色跟踪框为的卡尔曼预测子框,红点为估计位置。从序列Ⅱ的处理结果可以看出在非小目标环境中,跟踪框的位置始终保持在目标头部附近,且没有跟丢的情况出现,算法均获得了较好的跟踪效果。

图3 行人背景序列跟踪结果
6 结论
本文基于贝叶斯的跟踪思想,将卡尔曼预测估计与分类背景预测的检测思想相融合,获得一种目标跟踪算法:子框局部搜索跟踪算法。实验表明,本算法能够应对复杂及遮挡背景的跟踪环境,更适合于实际运用中,背景信息不明确、环境状况无法确定的红外目标跟踪场合。
[1]汪震,乔延利,洪津,王峰,李文涛.利用热红外偏振成像技术识别伪装目标[J].红外与激光工程,2007,36(6):854-855.
[2]张迎春,李璟璟,吴丽娜,李化义.模糊自适应无迹卡尔曼滤波方法用于天文导航[J].哈尔滨工业大学学报,2012,44(1):13-15.
[3]朱斌,樊祥,马东辉.一种改进的自适应背景预测红外弱小目标检测算法[J].激光与红外,2007,37(7):683-686.
[4]郭张婷,辛云宏.基于分类背景预测与图像分块技术的红外小目标检测算法[J].激光与红外,2012,42(5):572-578.
[5]徐军.红外图像中弱小目标检测技术研究[D].西安电子科技大学,2003:32-37.
[6]Xin Wang,Zhenmin Tang.Modified particle filter-based infrared pedestrian tracking[J].Infrared Physics&Technology,2010,10(3):122-124.
[7]Zhaoxia Fu,Yan Han.Centroid weighted Kalman filter for visual object tracking[J].Measurement,2012,5(4):650-655.
