三维激光扫描数据点位精度分析*
2014-04-14冯文江
冯文江
(广州市城市规划勘测设计研究院,广东 广州 510060)
0 引言
三维激光扫描技术是近年来快速发展的一项高新技术。三维激光扫描仪突破了传统单点精确测量的局限,利用高速激光扫描测量方法,大面积高分辨率地获取被测对象表面的三维坐标数据,能快速、大量地采集空间点位信息,为快速建立物体的三维模型提供了一种全新的技术手段[1]。
近年来,三维激光扫描技术已经被广泛应用到社会生产的各个方面,尤其在测绘领域是应用热点,特别是在医学研究及其应用领域、工业模具制造、工业逆向工程和优秀历史建筑保护领域中也得到广泛应用,取得了很多有益的成果,不仅提高了测量效率,而且扩展了工程测量的服务对象[2]。
三维激光扫描技术的广泛应用,反过来对三维激光扫描技术更进一步的发展提出了更高的要求,激光扫描仪的实际测量精度能达到多少,扫描仪能否应用在高精度精密工程测量领域等,都是亟待研究和解决的问题。本文从理论上分析影响三维激光扫描数据精度的因素,然后通过实验分析激光扫描数据的点位精度。
1 激光扫描数据精度影响因素
1.1 仪器误差
仪器误差主要是仪器机械部件的精密程度会对测距和测角产生影响,而且激光光束的性质也会影响到扫描数据的准确性。
激光扫描仪的测距系统误差由仪器内部时间测量单元误差、激光在大气中传播速度的误差、大气折射率误差、光电系统延迟误差等引起。偶然误差则主要由仪器加常数的测定误差、周期误差、计数器的量化误差、激光主波和回波信号对计数器的取样脉冲部位差、计数器频率不稳定误差等构成[3]。
激光光束偏转系统与角度量测装置共同构成了扫描仪的角度测量系统。激光光束偏转系统实现光束在水平方向与垂直方向的偏转,它是引起角度测量误差的主要原因之一。光束偏转系统主要由不同的扫描镜构成,这些光学器件直接影响测角精度。扫描镜转动时发生微小震动、扫描电机的非均匀转动等都会影响测角精度。角度位置传感器用来确定激光光束的水平位置和垂直位置,其质量也是影响测角精度的一个关键因素[4]。另外,仪器内部元器件的分辨率、产品质量和安装质量都会带来测角误差。
从激光扫描仪的测量原理可知,扫描仪对目标发射激光,根据激光发射和返回的时间差,计算出相应被测点与扫描仪的距离,再根据水平向和垂直向的角度值,计算出被测点的三维坐标。所以激光光束的性质对扫描仪的坐标测量有很大的影响。
如图1 所示,P 点为目标上的一待测点,由于激光光斑大小及聚焦性的影响,实测点的位置为P' 点处,水平角的影响为Δφ,垂直角的影响Δθ = θ' - θ,若忽略对测距的影响,则实测的坐标值为:

设扫描距离r =10 m,角度φ = 27°,θ = 15° ,激光性质对测角的影响Δφ = Δθ = 0.002° ,则可求得坐标差值:

可见,激光性质是点云数据质量的一个重要影响因素。
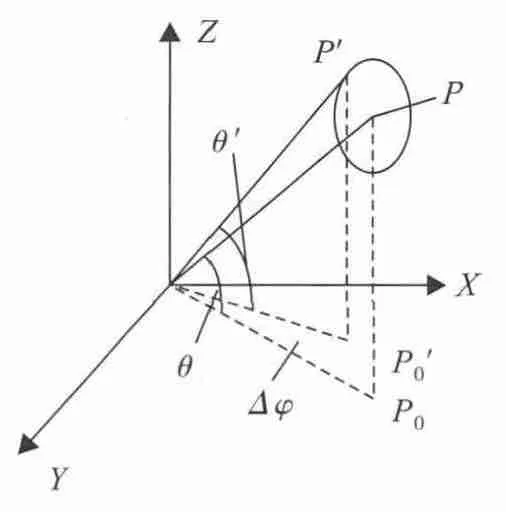
图1 激光性质对坐标测量的影响示意图Fig.1 The effect of coordinate measuring on laser properties
1.2 被测目标物体表面特性的影响产生的误差
激光测距依赖于来自被测目标反射的激光。一般情况下,反射信号的强度都将受到物体反射特性的影响。反射信号的有无和强弱直接影响到点云数据的测量精度。由于物体表面反射特性的差异,将导致激光测距产生一定的系统性偏差。物体的反射特性受到物体的材质、表面色彩、表面倾斜及粗糙程度等因素的影响。对某些材质的目标,由反射特性导致的系统性误差甚至会高出正常激光测距标准差的若干倍[5]。
1.2.1 被测物体表面粗糙引起的误差
当被测表面粗糙度过低或光泽比较明亮时,会使反射激光发生较强的镜面反射,反射光强常会引起测量报警或造成较大测量误差。表面粗糙度过大,表面凹凸不平,则激光束照射到表面凹凸顶处或凹凸边界时,光斑形状发生较大的变化,引起测距误差[6]。如图2 所示,目标物表面的粗糙可引起测距误差ΔS,即激光反射表面与平均表面间的距离。
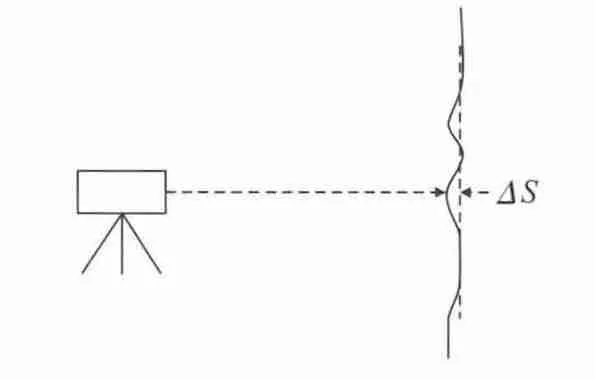
图2 被测物体表面粗糙引起测距误差Fig.2 The error caused by the rough surface of object measured
1.2.2 被测物体表面倾斜引起的误差
被测表面倾斜角的不同,入射光点所产生的散射光空间分布将发生变化,从而使接收透镜在单位立体角、单位时间内接受到的光能量发生变化。这就使得光电接收面上的像光斑光能质心相对其几何中心产生偏移。仪器的光电检测元件检测的是投射到其上的光斑的光能质心位置,而不是其几何中心的位置,这种光能分布的变化,将造成在光电检测元件上像光斑的光能质心相对于其几何中心发生偏移。
如图3 所示,P 点为目标物上一待测点,由于物体表面切线方向与激光束方向不重合,实测坐标点P0,S 为实测距离值。设扫描仪与目标物的距离为d,扫描方向与物体表面夹角为α,则因物体表面倾斜引起的激光脚点偏差
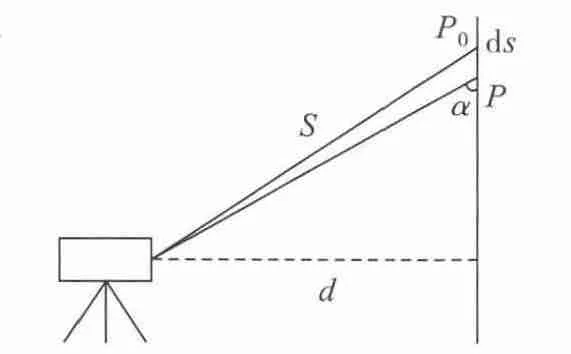
图3 被测物体表面倾斜引起的误差Fig.3 The error caused by the surface slope of object measured
1.2.3 边缘效应
不管扫描仪的聚焦能力有多高,激光脚点的光斑都具有一定的大小,而距离测量依赖于光斑范围内的反射能量。这样就会出现两种边缘效应:一种是在不同目标的交界处,会出现光斑的一部分能量在测量目标内,另一部分在相邻的目标内,两部分的反射能量都能到达接收系统,造成类似于GPS 多路径效应的效果,从而使测量结果产生系统性偏差;另一种是目标边缘的背景是天空或是其他已超出了有效测程的目标,光斑部分在测量目标内,同时也只有这部分的光斑能量能返回测距接收系统,其他能量将不能返回,造成激光测距的盲点,即无法获得该边缘点的测量信息。
如图4 所示为用1/2 分辨率扫描的某建筑物部分点云数据,由Faro 3D 扫描仪分辨率与点间距关系表可知,点间距d =3.068 mm。L1 为墙面的真实边界线,若点云数据与真实边界线的距离Δd <d,则墙边界线无测量点信息,即由扫描数据拟合的边界线L2 与真实边界线L1 存在误差Δd,且最大误差可达3 mm。
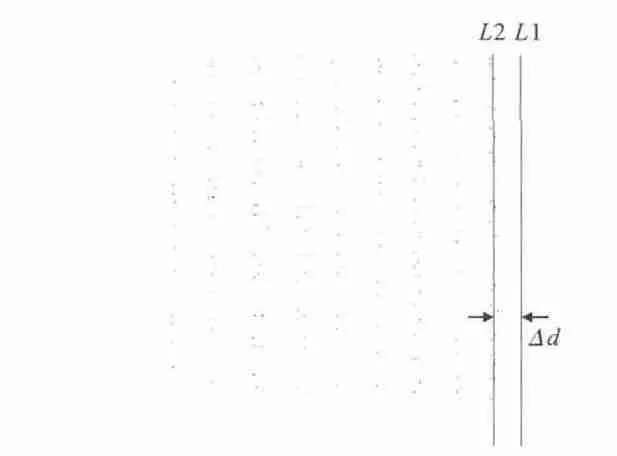
图4 边缘效应示意图Fig.4 The schematic diagram of edge effect
另外,被测物体表面颜色和材质都会影响激光测距的准确性,从而对扫描数据精度产生影响。
1.3 外界环境的影响产生的误差
外界环境因素,如温度、湿度、气压、光照条件、震动等都会影响激光在大气中的传播,导致测量误差的产生。环境温度变化会引起光学元件的特性变化和传感器外壳尺寸的伸缩;温度和湿度会使空气折射率分布不均匀,激光束发生弯曲,产生测量误差,用全站仪进行三角高程测量时,因为空气密度不均匀,会产生气差,需要考虑气差改正[7]。扫描过程中风引起的震动,会影响仪器接收反射回来的信号,产生测距误差。光照条件影响物体表面的反射率,对反射回来的激光束的强度和聚焦性能产生影响。
由于三维激光扫描仪属于精密机电产品,低温或者高温都影响电子器件及机械部件的使用性能。环境温度低于仪器的临界使用温度,直接影响供电电池的性能和三维激光扫描仪的扫描精度及速度。其次,三维激光扫描仪采用的是可见光测量,在下雨、下雪和沙尘暴等恶劣天气下扫描的点云数据噪声呈几何倍数放大,严重影响点云精度,而且还会影响仪器安全使用。
2 三维激光扫描数据点位精度分析
2.1 理论模型
对激光扫描仪数据的质量进行评定,所采用的方法是将激光扫描测量数据与高精度仪器测量结果相比较。作为传统测量工具,电子全站仪在坐标测量方面拥有绝对优势,精度已达mm级甚至更高。所以实验中选择将电子全站仪坐标测量数据作为坐标测量的准真值,将激光扫描数据与其进行对比,以此衡量激光扫描数据的精度。
具体步骤如下:在外业布设一系列靶标,利用高精度的全站仪实测这些靶标的三维坐标(X,Y,Z);再利用扫描仪对这些靶标扫描,提取靶标在扫描仪坐标系下的坐标(x,y,z)。利用空间相似变换公式:

将扫描仪坐标转换至全站仪坐标系下,其中R 为两坐标系间的旋转矩阵,T 为平移矩阵。
首先,选取至少3 个靶标的两套坐标,利用空间相似变换公式(3),求出变换参数R 与T,然后利用变换参数将靶标点的扫描坐标转换至全站仪坐标系下,与全站仪实测坐标进行对比,从而确定点云数据质量。
扫描点在三个轴向的误差为:

式中:(x',y',z')为经过R、T 变换后扫描点在全站仪坐标系下的坐标。
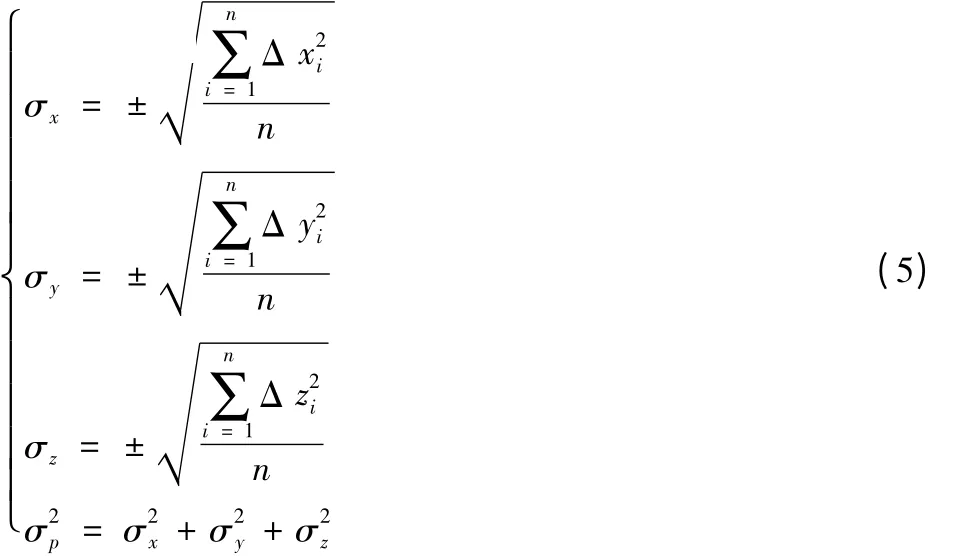
若量测了n 个点,则点位中误差为:式中:Δxi,Δyi,Δzi分别表示第i 个扫描点3 个轴向的误差(i =1,2,…,n)。
2.2 实验过程
如图5 所示,在一墙面上布设16 个平面靶标,靶标的位置是随机的,利用Faro Focus 3D 扫描仪对靶标所在的区域进行精细扫描。扫描结束后,将数据导入数据处理软件Faro Scene 中,在软件中提取靶标的中心点坐标。然后在独立坐标系下用全站仪测量16 个平面靶标的中心点坐标。坐标数据,如表1 所示。本次数据采集环境:温度5℃、偏北风3 级、多云。
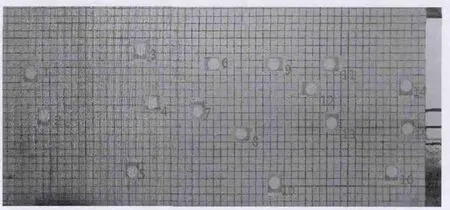
图5 平面靶标布设示意图Fig.5 Schematic diagram of the flat targets layout

表1 靶标扫描坐标与全站仪坐标Tab.1 The scanning data and total station data
2.3 精度分析
选取14 -16 号3 个平面靶标数据作为控制点,根据坐标转换公式(3),利用最小二乘间接平差原理,通过Matlab 编程计算出扫描仪坐标系转换至全站仪坐标系下的变换参数为:
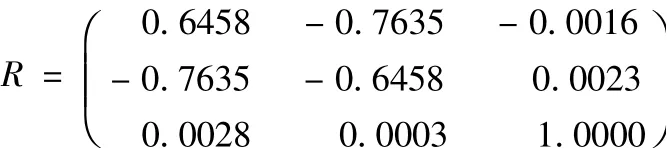
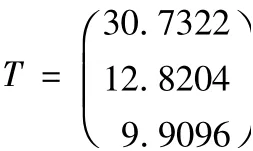
将其余13 个靶标数据作为检核点,利用变换参数R、T 将其扫描坐标转换至全站仪坐标系下,并与全站仪实测坐标相比,转换后的扫描坐标和坐标差,见表2。
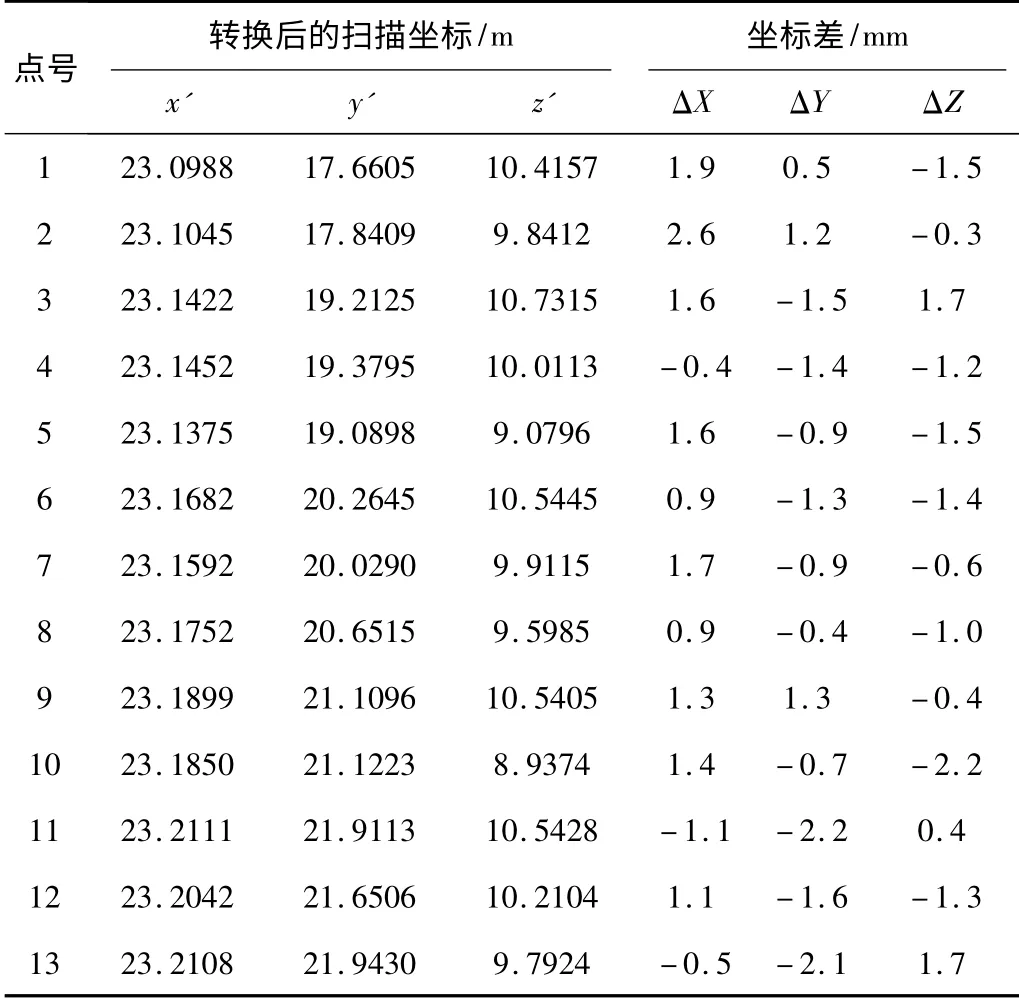
表2 转换后的扫描坐标和与全站仪的坐标差Tab.2 Difference between the transformed scanning coordinates and total station coordinates
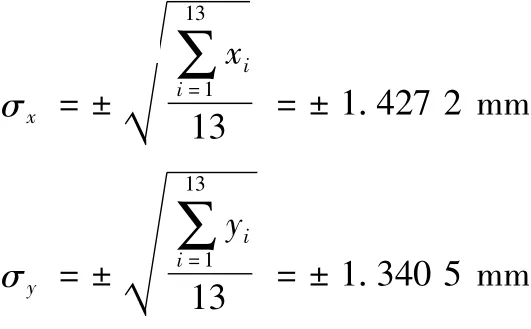
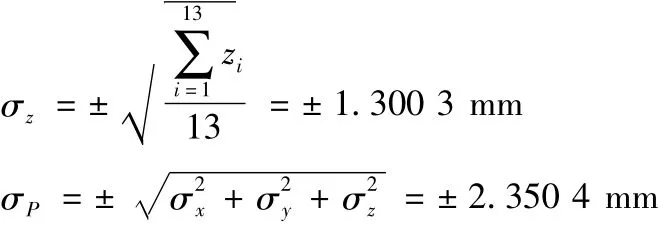
根据式(5),可计算出各轴向误差及点位中误差:
3 结论
本文从仪器误差、被测物体表面特性的影响产生的误差和外界环境等方面介绍了三维激光扫描数据精度的影响因素,并通过实验验证了三维激光扫描数据的点位精度。从实验结果可以看出,单站三维激光扫描数据的精度可以达到mm 级。由此可见,三维激光扫描仪有较高的绝对测量精度,可以作为一种高精度测量仪器应用在工程测量领域。但本文旨在研究单站,对分布在同一平面的目标进行扫描的测量精度,对于需要多站,复杂形状物体扫描的整体测量精度还需要进一步深入探讨。
[1] 李巧丽.基于点云数据的塑像三维建模[D].上海:同济大学,2009.
[2] 官云兰.地面三维激光扫描数据处理中的若干问题研究[D]. 上海:同济大学,2008.
[3] 耿春萍,程度,张治.激光脉冲测距的测距精度及误差分析[J].光电技术应用,2007,22(2):28 -31.
[4] Yuriy Reshetyuk. Investigation and calibration of pulsed time-of-flight TLS[D].Stockholm:Royal Institute of Technology,2006.
[5] 施贵刚.地面三维激光扫描数据处理技术及作业方法的研究[D].上海:同济大学,2009.
[6] 吴剑锋,王文,陈子辰.激光三角法测量误差分析与精度提高研究[J].机电工程,2003,20(5):89 -91.
[7] 顾孝烈,鲍峰,程效军. 测量学[M]. 4 版. 上海:同济大学出版社,2011.
