基于零值补偿和经验模态分解的加速度积分误差消除方法
2014-04-10冯锟
冯 锟
( 武汉大学 电气工程学院,湖北武汉 430072 )
基于零值补偿和经验模态分解的加速度积分误差消除方法
冯 锟
( 武汉大学 电气工程学院,湖北武汉 430072 )
利用频谱对实测数据分析,得到误差频率和理想的加速度变化曲线以评价误差,以基于零值补偿和经验模态分解的方法对实测数据进行处理,评价误差,对比得到该方法能有效消除积分算法中误差的结论。
加速度传感器 频谱分析 误差评价 零值补偿 经验模态分解
0 引言
工程振动量值的物理参数常用位移、速度和加速度表示。加速度传感器测量加速度信号具有操作方便、处理速度快等优点,通常使用加速度传感器测量值积分来动态测量振动位移量的大小。在实际使用中,由于物理原因,加速度传感器测量信号通常存在误差,针对误差的消除前人已有所研究,主要有:基于通频带扩展的动态补偿法、基于消除趋势项的低频衰减算法、基于噪声去除的移动平滑滤波算法等。
现提出基于零值补偿和经验模态分解的加速度积分算法的误差补偿,从系统误差和随机干扰两个方面对误差信号进行消除,结合了零值补偿的运算快速性和经验模态分解(Empirical Mode Decomposition,EMD)对非平稳信号的适应性,对加速度信号的误差消除上有显著效果。
1 实测加速度直接积分的误差及其评价
1.1基于电机振动检测的加速度数据采集
电机的运行状态对电力系统稳定安全有着重要作用。当电机处于异常状态时,如不能及时处理,就会发生故障。机械振动测量技术不仅仅应用于寻找振源,振动强度和可靠性、隔振、减震、舒适性等问题分析,近年来又成功应用于重要机械设备的监测和控制、预报、识别和分析故障等方面。因此,电机振动分析与测量就显得尤为重要。由于在通常的频率范围内振动幅值很小,位移、速度和加速度之间都可互相转换,且加速度测量方便,所以在实际使用中振动量的大小一般用加速度的值来度量。
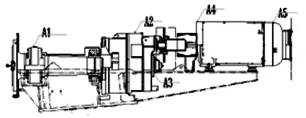
图1 电机振动检测传感器位置图
如图1所示,电机振动检测的原理即在电机主轴和定子等部位(图中A1-A5)安装加速度传感器,测量振动加速度,用实测数据进行积分,得到振幅位移。
由电机上的加速度传感器测出了三组正常状态下的采样数据。加速度传感器采集频率1 000 Hz,加速度单位为g·m/s2(g为重力加速度):单方向从A点运动至B点;从C到D后再返回到C;从E点到F点,再由F到E,并再重复一次,其初速度皆为0。将三组运动情况所测结果分别标记为A、B、C三组,如图2所示。

图2 电机振动示意图
2.2针对加速度实测数据变化的误差分析
2.2.1 实测数据变化的频谱分析
统计出原始测量加速度数据在时域的分布,发现有众多时刻加速度趋于零,因为研究主题是对运动过程中的加速度变化进行积分和改进,因此将加速度趋于零的测量数值作为无效值剔除。拟对经过剔除无效值之后的时域加速度数据进行频域分析,得到加速度信号在频域上的分布,分析主要频谱和干扰频率。
用matlab对原始加速度数据进行傅里叶变换,得到频域分布,如图3所示。
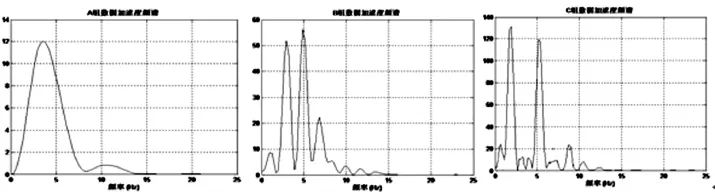
图3 A、B、C组加速度频谱图
比较图3各组的频谱可知,三组加速度对应的频谱有显著特征,对幅度较高的频率进行数据分析,见表1。
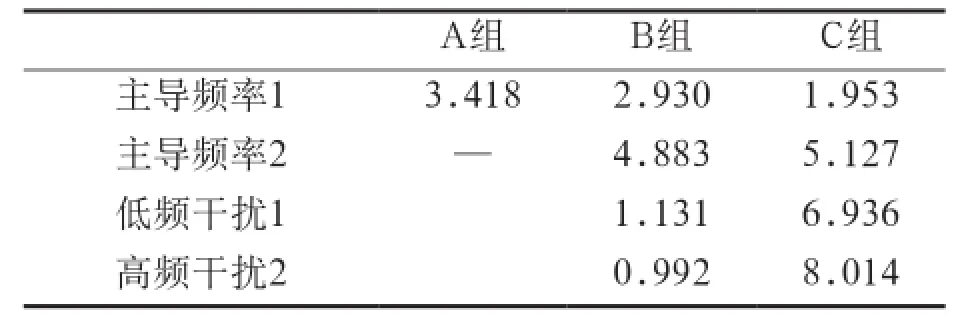
表1 各组加速度主要频率 H z
发现A组运动的加速度频率较为单一,但频谱主瓣较大;而B、C两组主要是以4 Hz左右的两个频率为主导,有一定频率分裂,运动过程的复杂程度对加速度测量数据有显著影响。
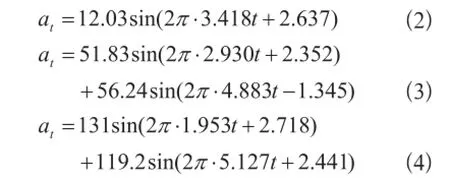
2.2.2 加速度变化的理想方程
利用主导频率的幅频相频特性构造理想加速度变化方程如下:

2.2.3 参考理想方程的误差评价
用理想加速度方程和经过剔除无效值之后的三组测量数据分别进行拟合,建立误差评价指标,然后根据运动过程结束后,速度为零的原则,确定加速度过程的总面积为零,综合判断各组测量数据是否存在明显误差。由式(2)、(3)、(4)建立运动方程。以理想加速度方程基准,对测量数据采用以下判断指标进行误差分析:
1)均方误差:

2)平均相对误差:
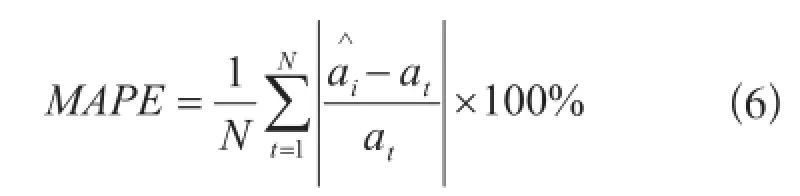
3)合格率:
其中

合格率是指以相对偏差在25%内为合格点,在采样时段内的合格点数占总的采样点数的比重。
4)加速度总面积:

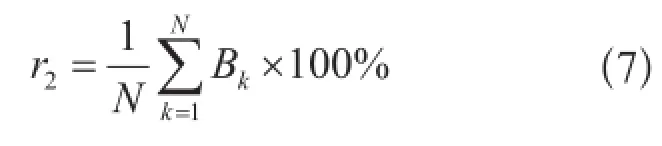
式(8)中,S为加速度总面积,ai为剔除无效值之后各采样时刻的加速度测量数据,因为时域上三组采样间隔等值,故将时间简化为标幺值1。加速度总面积物理意义表示为一个运动过程结束后摆动速度,根据题目中运动结束后停止摆动的情景分析,理想情况下S=0。通过对式(5)~(8)的计算,得到各项指标参数列出下表。
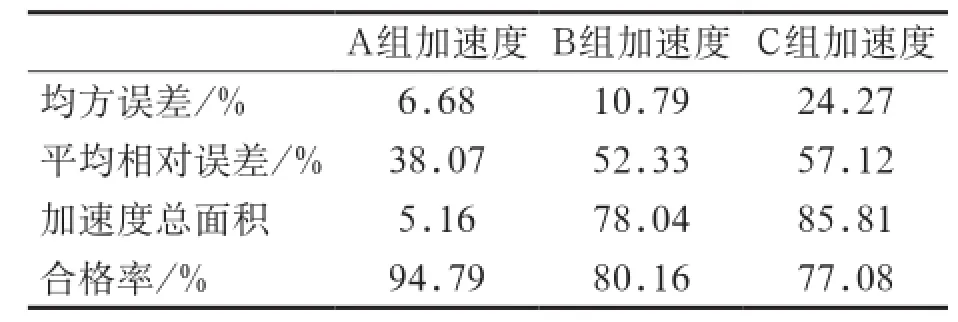
表2 误差评价表
综合误差评价数据发现,A组数据与理想加速度偏差较小,而在运动情况变复杂的B组和C组,数据偏差较大,因此存在明显的误差。
3 基于加速度零值补偿和经验模态分解对误差的消除
为了消除系统误差和随机误差的影响,提出了基于加速度零值补偿和经验模态分解的方法,首先,利用加速度零值补偿来消除系统误差,然后,对消除系统误差后的数据进行经验模态分解滤波以消除高频随机干扰,结果表明,经过零补偿和EMD处理后获得的加速度信号积分后得到速度和位移波形与理想运动情况比较吻合。
3.1零加速度补偿法消除系统误差
3.1.1 加速度零值补偿法的基本原理
以对加速补偿为例,如图4所示,由于误差的存在,我们发现加速面积不等于减速面积,通过进行补偿,使坐标轴变为虚线部分。
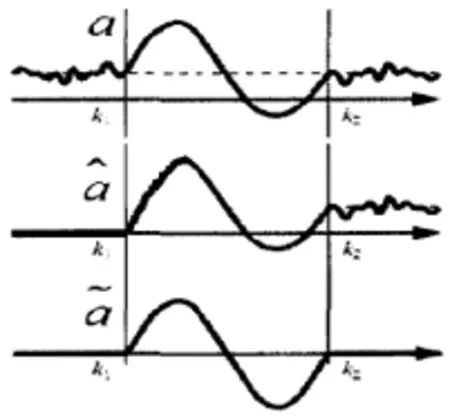
图4 零加速度补偿原理
具体过程如下:

其中k1是运动状态的起点,k2是运动状态的终点,0与k3分别为加速度样本序列的起始点与结束点。a(k)为修正前加速度,为经过前段静止阶段加速度归零修正的加速度。为经过后段静止阶段加速度归零修正的加速度。
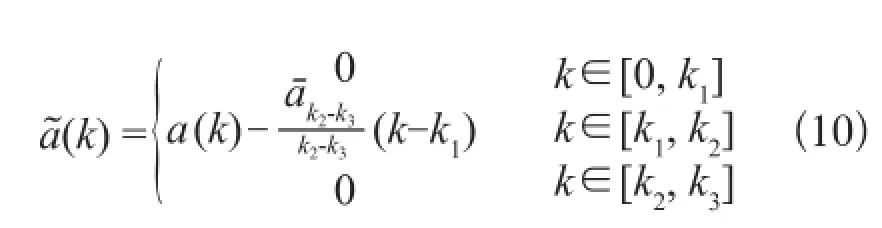
图5~图8可用来说明修正前和修正后的速度对比,修正前速度由于误差并没有回到零,而通过对加速度的归零修正,使速度归零,与理论情况比较接近。
单方向的速度和位移实际比较符合,也就是在单方向运动过程中,误差较小,所以对单方向运动不采取补偿法。而对于B和C组,由于系统误差的存在,在经过加速和减速过程后,速度并没有为零,为了消除系统误差,采取零加速度补偿,使加速面积等于减速面积,已符合基本物理规律。
3.1.2 零加速度补偿法的处理效果
用matlab编程后得到的B组和C组加速度、速度和位移修正前和修正后的波形。
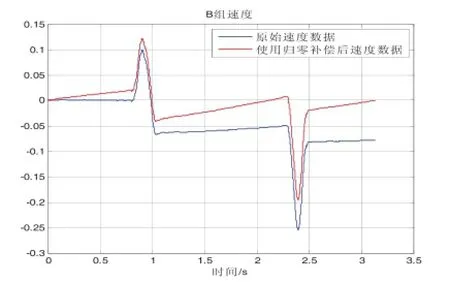
图5 B组速度对比
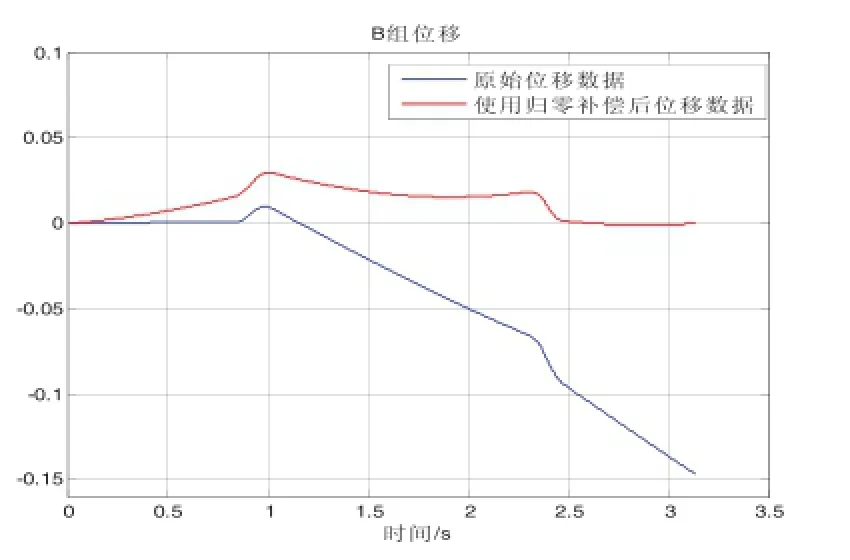
图6 B组位移对比
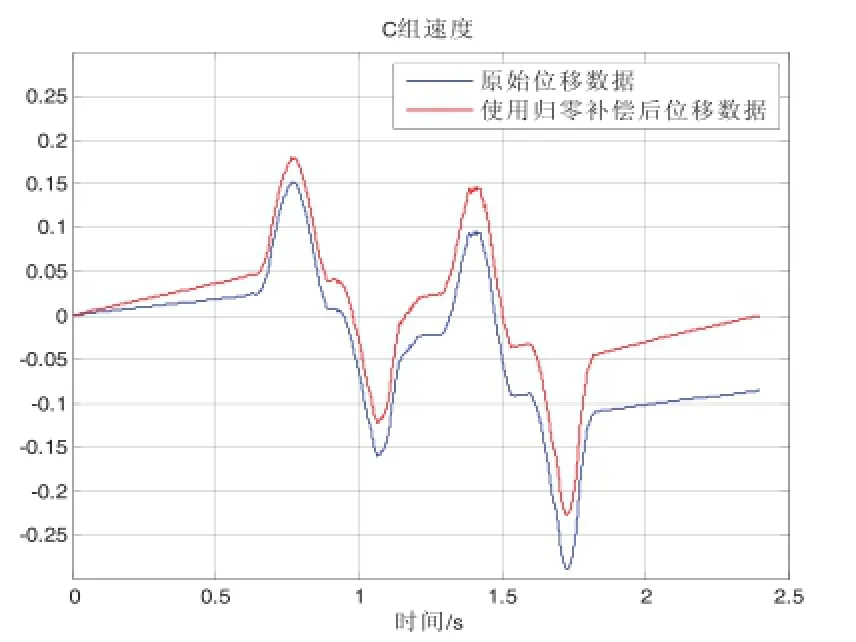
图7 C组速度对比
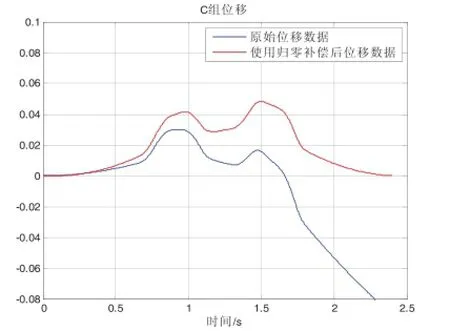
图8 C组位移对比
通过比较,可以发现归零法能够明显消除由于系统本身存在的误差造成的影响,得到的波形与实际很吻合。以B组的速度为例,在未补偿前,速度每经过一个加速减速周期后,都会偏离零值一定的距离。而采用归零补偿后,速度与零值的偏移得到极大的削减,并且经过一个加速减速周期后最终回到零值。可见这种方法的修正力度能够达到一定的要求,究其原因,在于该修正方法对每一个数据都进行了修正,使得误差在积分中的累积效应得到了减弱。
3.2经验模态分解(EMD)消除随机误差
EMD算法是近年来发展起来的一种新型的自适应信号时频分析方法,它依据信号自身的特点,自主地抽取信号内在的固有模态函数,是一种适用于分析非线性非平稳信号的方法。该方法被认为是对以线性和平稳假设为基础的傅立叶分析和小波变换等传统时频分析方法的重大突破。
对于实际中存在的非平稳信号,其频率是随时间变化的,此时傅立叶频率不再适合,为了表征信号的局部特征就需要引入瞬时频率的概念。为了能够使获得的瞬时频率有意义,需要一种分解方法将信号分解为单分量的形式,从而能够被瞬时频率所描述,即EMD分解方法,将原信号分解为许多的窄带分量,每一分量被称为本征模态函数(Intrinic Mode Function,IMF),分解结果由若干本征信号函数(IMF)和一个残余信号组成。即

确定信号X(t)所有局部极值点,然后用三次样条线将所有局部极大值点连接起来形成上包络线;将所有的局部极小值点连接起来形成下包络线。上下包络应该包含所有的数据点。
上下包络线的平均值记为m1,求出X(t)-m1=h1,然后对h1分别进行判断。理想状态下,如果h1已经满足基本模态分量的两个条件,那么h1就是第一个分量c1。要分解出适合的本征模态函数就必须要确定IMF的判据准则,用标准偏差系数(StandardDeviation, SD)作为判断依据。
式(12)中:T是信号的总时间长度,取为0.3,如果不等式成立则得到的IMF满足要求。如果h1不满足IMF的条件,则把h1作为原始数据,重复步骤(1)、(2),得到上下包络线的平均值m11,再判断h1-m11=h11是否满足IMF的条件,如不满足,则重循环k次,得到h1(k-1)-m1k=h1k,使得h1k满足IMF的条件。记c1=h1k,则c1为信号X(t)的第一个满足IMF条件的分量。
用原信号X(t)减去c1,得到一个去掉高频成分的新信号r1,即

对r1重复得到c1的过程,得到第二个IMF分量c2,如此反复进行,一直到n阶IMF分量cn或其余量rn小于预设值;或当参与分量rn是单调函数或常量时,EMD分解过程停止。
最后,X(t)经EMD分解得到:

EMD将信号分解成若干阶频率从高至低的本征模态函数,整个过程体现了多尺度的自适应滤波特性。根据这一特点,我们可以根据信号的要求,有目的的把相应的IMF整合,以凸显待分析信号在某一频率范围内的特点,以此来构建新型的滤波器,以消除高频噪声干扰。
3.3滤除随机误差后的加速度波形
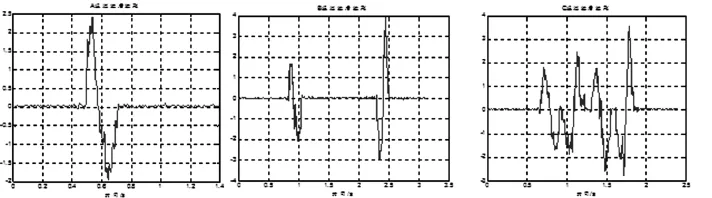
图9 A、B、C组滤波后的加速度波形
观察图9可以发现,滤除随机误差后的加速度波形十分清晰,与理论情况接近度高。以A组为例,通过比较滤波后和滤波前加速度的波形,可以很清楚的看到滤波后波形上的噪音部分已被消除,波形的包络线十分的清晰,并且波形与理论情况十分的接近,因此,可以认为EMD消除随机误差是可行的,可靠性较高。
3.4改进算法得到结果的误差评价
用基于零补偿和EMD的改进算法重新对经过剔除无效值之后的数据处理,得到结果再次进行误差评价,列出表3:
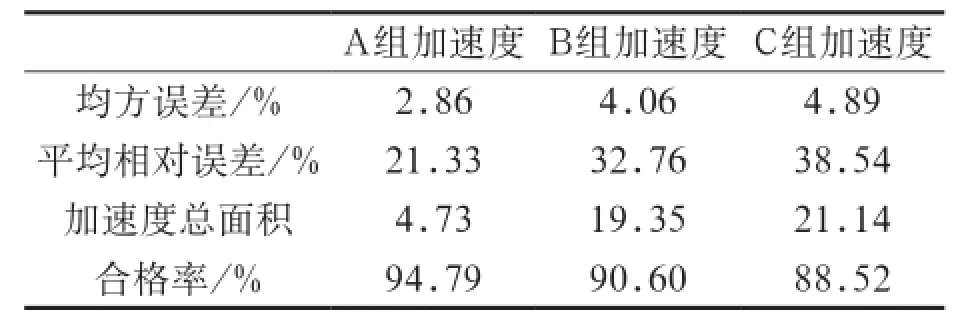
表3 改进算法后的误差评价
对比表2可知,A组的误差指标变化不大,但是B、C组发生极大改善,误差被较好地消除。因此基于零补偿和EMD的改进算法能够有效地消除误差,提高了测量数值和积分结果的准确性。
4 结语
本文在分析误差过程中,剔除测量加速度数据的无效值,对剔除后的值进行频谱分析,建立理想运动方程,综合评价指标定量判断误差大小,得到系统误差和随机误差。
针对两种误差,做了基于零补偿和经验模态分解去噪的算法上的改进,得到速度和位移的时域波形,与不采取误差消除情况进行比较,并再次进行误差评价并和之前的误差对比,证明改进算法能够降低测量中的误差。
[1] 李广军,金炜东.列车横向加速度传感器的误差补偿[J].计算机工程与应用,2012,48(5):15-17.
[2] 周英杰.加速度测试积分位移算法及其应用研究[D].重庆大学,2013.
[3] 李晓龙,张志洲,佘龙华,常文森.高速磁悬浮列车悬浮控制中加速度信号数字滤波算法研究[J].机车电传动,2009,1:39-42.
[4] 刘牮,张辉,雷龙.加速度数据的采集及分析[J].信息技术,2013,12:110-116.
[5] 宋薇.大规模风电场超短期风电功率预测的误差分析与评价[D].东北电力大学,2013.
[6] 徐时伟.用于空中手写的加速度传感器积累误差消除技术研究[D].浙江大学,2012.
[7] 陈隽,徐幼麟.经验模式分解在信号趋势项提取中的应用[J].振动、测试与诊断,2005,25(2):101-104.
[8] 赵宝新,张保成,赵鹏飞,等.EMD在非平稳随机信号消除趋势项中的研究与应用[J].机械制造与自动化,2009,38(5):85-87.
Method of Eliminating Acceleration Integral Error Based on Zero Compensation and EMD
Feng Kun
(Wuhan University, Electrical Engineering College, Hubei 430072, China)
In this paper, by using the frequency analysis of the measured data, the error frequency and ideal acceleration change can get, then process measured data based on the zero compensation and Empirical Mode Decomposition(EMD), evaluate the error, to compare and get the conclusion that this method can eliminate the error in integral algorithm.
Acceleration sensor Spectral analysis Error evaluation Zero compensation EMD
TM302文献标示码A
1674-2796(2014)03-0024-06
2014-04-05
冯锟(1993—),男,本科在读。