基于拉绳位移传感器的登船桥高度测量系统设计
2014-04-08徐汉萍
徐汉萍
(深圳中集天达空港设备有限公司,广东 深圳 518067)
0 引言
随着中国经济迅速发展,人民生活水平不断提高,促使国内邮轮母港快速的发展[1]。邮轮母港快速的发展也带动了连接候船楼与邮轮之间的封闭式连接廊道-登船桥业务的快速发展[2]。由于登船桥接船的升降范围较大,加上其接船口搭接在游轮上,使得原来采用超声波测量高度的方法变得不可行。为了解决上述问题,必须寻找登船桥高度测量的新方法。
本文介绍的利用拉绳位移传感器进行登船桥高度测量新方法,其拉绳传感器安装在登船桥旋转平台与通道的铰接处,避免了防护网等的干涉,而且成本与10米以内的超声波传感器的价格较低,测量精度较高,本高度测量新方法解决了上述问题,在实际登船桥运用中经济性较高、使用维护方便,具有推广应用价值。
1 拉绳位移传感器在登船桥高度测量系统中的运用研究
登船桥的升降运动采用液压控制,行走运动采用四个行走电机进行的四轮驱动,行走采用四轮驱动的目的是为了增加登船桥的稳定性。登船桥的旋转平台既是登船桥运动的支承和旋转中心,又是登机桥作水平运动和垂直运动的支承点。
当登船桥在前端升降立柱的驱动下进行桥的上升或下降运动至某一高度时,这时通道底部相对于桥在水平时有一个倾角,计算了这个倾角的度数,就能计算登船桥相对于水平位置变化的高度,以到达计算登船桥高度的目的。采用拉绳位移传感器作为检测元件,测量计算登船桥高度变化时的倾角角度。
1.1 拉绳位移传感器的工作原理
是借助一根特制的高柔韧性复合钢丝来测量直线位移的。钢丝通过合金钢弹簧被绕于铝合金滚筒之上,由此将直线位移转变成旋转运动。滚筒直接与多级电位器同轴连接,从而使位移量被转变成电阻信号,由于拉绳传感器内的弹簧保证拉绳均匀收放,使得拉绳收放的长度与输出的电压信号成线性的正比关系。在此选用美国CELESCO PT5DC系列20inches长的拉绳位移传感器[3],该传感器为工业等级,具有测量精度高(最高精度可达到±0.01%)、可靠性好、防护等级高(可达IP68)、寿命长、维护方便等特点。
1.2 登船桥利用拉绳传感器高度测量原理
登船桥的旋转平台和通道通过铰接形式进行连接,将拉绳传感器利用L型的支架固定在旋转平台上,拉绳通过“‘E”点的转接件改变方向后与通道底部固定连接,如图1所示。

图1 通道水平位置时拉绳传感器的安装位置图
在登船桥的通道进行上升或下降运动时,通道沿着铰耳中心点“O”点进行转动。
如图1所示,通过PLC可计算出初始状态下对应的弦长(L0),其计算公式见式(1)所示,故初始状态下的弦长(L0)也是已知数。

1.3 登船桥高度计算公式推导
1.3.1 登船桥高度变化α倾角计算
如图2所示,当登船桥在水平位置有上升或下降的命令时,桥体通道进行上升或下降,通道底部连接拉绳传感器一端的“F”点就运动至“G”点(以上升运动为例进行计算说明),这时,通道底部的倾角夹角变化了“α”角度,这时对应的玄长为L,这时变化的玄长L计算公式如下[4]:

图2 登船桥高度变化α倾角计算原理示意图

桥高度变化后,拉绳传感器拉绳伸出变化的长度ΔL,由式(1)、(2)得出式(3)如下:

由式(3)可推导计算出:登船桥高度变化α倾角计算式见如下式(4):

对式(4)说明如下:
(1)ΔL可从拉绳传感器变化的电压值送给PLC的AD模块,经过PLC计算获得。
(2)按照设计规范的要求,α角的范围为:-12°≤α≤+12°
1.3.2 登船桥高度计算
经过对坐标轴的修正,如图3所示,登船桥的高度计算公式见式(5)所示:


图3 登船桥高度计算原理示意图
式(5)中的α值由式(4)中计算求的。
2 登船桥高度测量控制系统设计
由于登船桥行走采用四轮驱动,有较复杂的函数计算,其控制系统选用的是三菱Q系列Q02UCPU作为控制元件[5],采用HAKKO品牌的15寸触摸屏为触摸显示元件[6]。
2.1 控制系统硬件设计
对登船桥高度测量系统的硬件设计,将超声波传感器的模拟量信号输入PLC的A/D模块,PLC经过算术和逻辑运算后,给出登船桥高度显示值给面板上的LCD触摸屏进行显示。可利用面板上LCD触摸屏的触摸按钮,对高度显示的初始值参数和显示值进行设定和修改。其硬件原理框图见图4所示。
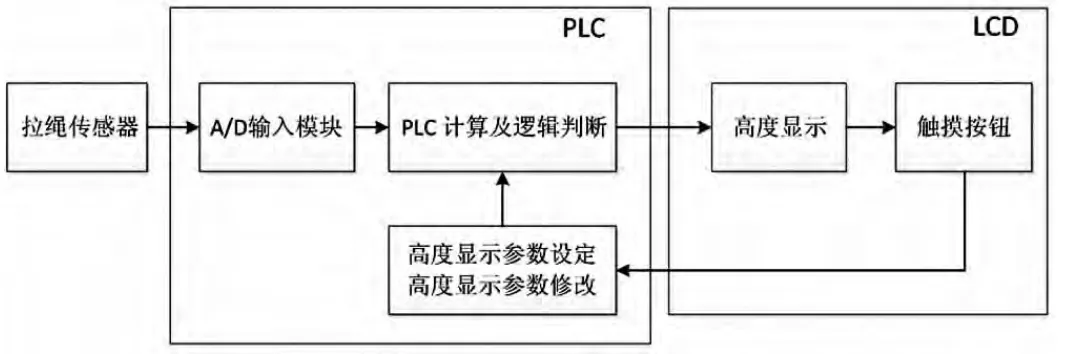
图4 登船桥高度测量控制系统硬件原理框图
2.2 控制系统软件设计
由于三菱Q系列的PLC具有较强的函数运算功能[7],将上述计算公式设定为一个FB功能块,在计算时调用,可简化程序设计。
如图3中所示,登船桥高度计算均是以桥体通道在水平位置的高度作为计算参考的基准,在初始位置拉绳伸出的长度也是后续登船桥升高或降低引起拉绳长度变化计算的基准,为了使PLC获得拉绳初始位置的电压值,在LCD触摸屏的设定画面设计了画面以获得该值。在PLC程序中还增加了一些逻辑判断以保证高度数据的准确,其控制系统软件流程图见图5。
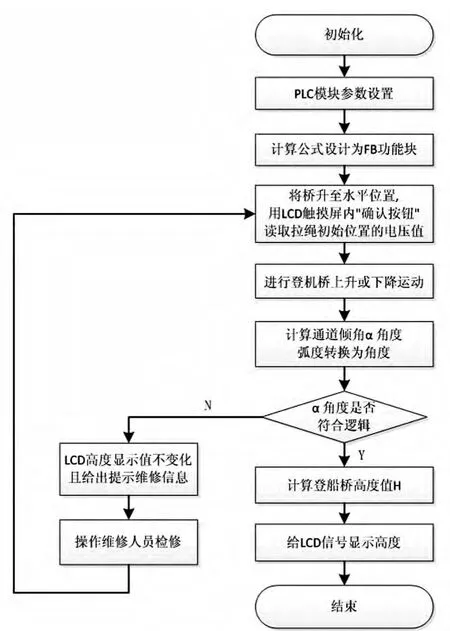
图5 登船桥高度测量控制系统软件流程图
3 结束语
本文详细阐述了登船桥高度测量新方法实现的原理、拉绳传感器的运用、高度测量的公式推导、控制系统硬件原理框图和控制系统的软件设计。实际使用结果表明:该高度测量新方法具有较高的测量精度(误差小于±10 mm),具有较高的性价比。由于采用工业级的拉绳传感器,其可靠性高、使用寿命长,而且使用维护非常方便,实际使用满足功能要求,达到了理想的设计效果。
[1] 王诺,邮轮经济[M].北京:化学工业出版社,2008
[2] 王欣,天津国际邮轮母港客运站设计[J].建筑技艺,2012,19(3):104-108
[3] CELESCO Catalogue of cable extension transducers[M].美国:美国CELESCO公司,2009
[4] 叶其孝,沈永欢,实用数学手册[M].北京:科学出版社,2005
[5] 满永奎,边春元,赵苏,三菱Q系列PLC原理与应用设计[M].北京:机械工业出版社,2010
[6] 李方圆,触摸屏工程应用[M].北京:电子工业出版社,2008
[7] MITSUBISHIQCPU可编程序控制器编程手册[K].上海:菱电自动化(上海)有限公司内部资料,2009.
