PCNN在金属拉链缺陷检测中的应用
2014-04-03欧幸福唐雄民陈文凤
张 淼,欧幸福,唐雄民,陈文凤
ZHANG Miao,OU Xingfu,TANG Xiongmin,CHEN Wenfeng
广东工业大学 自动化学院,广州 510006
School of Automation,Guangdong University of Technology,Guangzhou 510006,China
1 引言
金属拉链在生产过程中,常出现拉链链齿、拉头和限位码缺失等瑕疵。目前该产品的外观质量检测主要由人工方法完成。人工检验方法一方面,检测效率低,成本高,工人劳动强度大;另一方面,人为因素影响很大,易造成员工疲劳,直接影响了产品检验的可靠性,产品品质的检测稳定性较差、效率低,制约了拉链行业的发展。改进生产工艺,提高效率,降低产品的生产成本,实现产业技术的升级,成为行业发展的迫切需要。
目前数字图像处理技术已被广泛应用于生产过程中,将数字图像处理技术应用到金属拉链外观质量检测领域也得到国内外研究人员的广泛关注。现今采用图像处理对金属拉链进行缺陷检测的研究,主要集中在金属拉链齿数检测方面[1-2],对金属拉链外观质量检测的研究较少。
如何提取拉链特征图像是拉链外观质量检测系统的关键,传统的图像分割算法如OTSU法和直方图法依赖于灰度统计,忽略像素的空间关系,容易造成图像信息丢失,拉链特征图像提取效果较差。PCNN网络是一种模拟动物大脑视觉皮层的同步发放脉冲特性的人工神经元模型,具有良好的尺度、旋转、变形和强度不变性的特征,因而被广泛运用于图像处理领域。如文献[3]采用改进型PCNN实现对织物疵点检测,文献[4]运用改进型PCNN实现智能灯检机的研制,文献[5]将PCNN与最大相关准则结合运用于图像分割的研究,文献[6]应用PCNN实现对刀具磨损的检测等,实践证明运用PCNN实现图像二值分割,明显优于传统方法。而国内外将PCNN运用于金属拉链缺陷的外观质量检测的研究尚未见报道。
针对金属拉链的特点和PCNN网络的工作机理,本文在传统神经网路的基础上提出一种改进型PCNN模型和灰度跃变检测相结合的图像处理方法,实现对拉链外观质量检验。利用PCNN的同步脉冲发放特性分割获得链齿图像,并结合PCNN的形态学运用提取拉头和限位码图像,建立金属拉链的判别模型,运用区域像素统计与灰度跃变检测的方法实现对拉链外观质量的鉴别。实验结果表明该方法是可行的。
2 PCNN网络模型
2.1 传统PCNN模型
由Eckhorn提出的PCNN网络模型是由若干神经元相互连接组成的单层反馈型网络,单个神经元模型由接收域、耦合调制域和脉冲发生器三个功能单元构成[7-8],如图1所示。
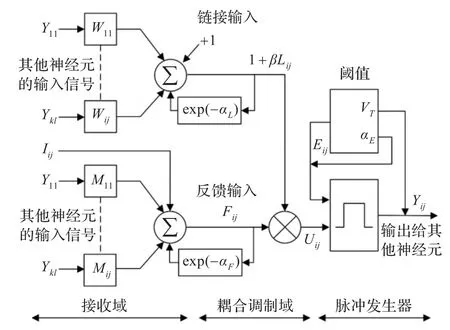
图1 PCNN模型结构
PCNN数学模型为:
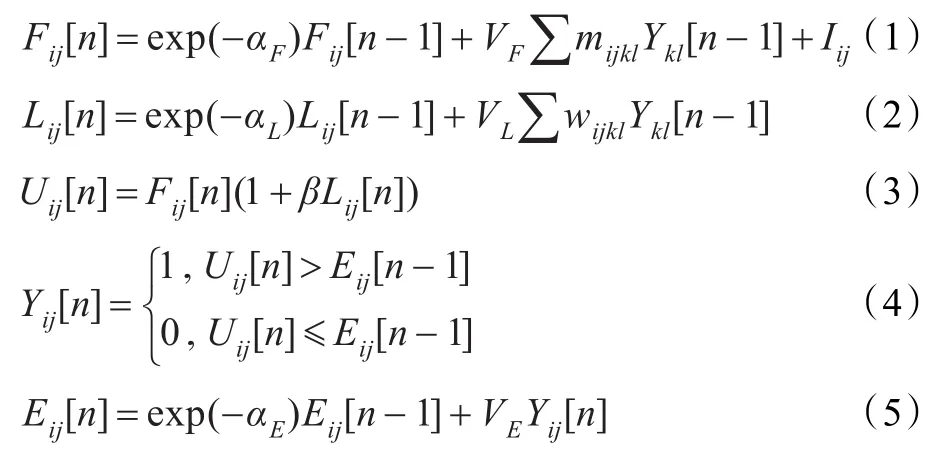
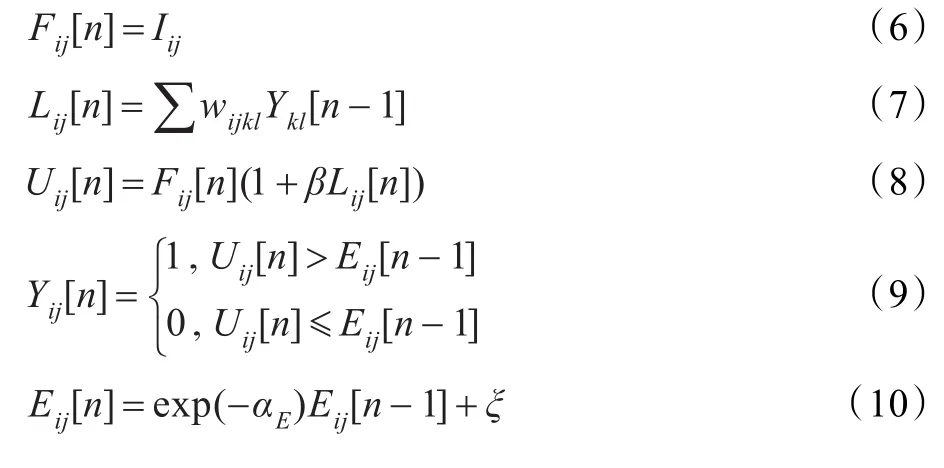
其中,i、j下标为神经元的标号,n为迭代次数,Iij为神经元的外部刺激,Fij[n]是第[i,j]个神经元的反馈输入,Lij[n]为连接输入项,Eij[n]为动态阈值函数,VF、VL、VE分别是 Fij[n]、Lij[n]、Eij[n]的放大系数,αF、αL、αE为相应的衰减时间常数,满足αF<αE<αL,β为连接系数,W 和M 是链接权重矩阵,Yij[n]为神经元第n次输出结果。
PCNN运用于图像处理时,将PCNN网络中的神经元与图像像素分别对应,初始时刻将Fij[0]、Lij[0]、Eij[0]、Yij[0]均设置为0,所有神经元Nij没有输入,神经元之间未建立耦合关系,动态阈值为0。网络进行迭代时,像素的灰度值 Iij作为神经元 Nij的反馈输入Fij[1],Lij[1]仍然为0,Uij[1]=Iij>Eij[1]=0,输出 Yij[1]=1,该神经元发生自然点火。一旦神经元点火,其动态阈值Eij[n]将急剧增大,并以时间指数衰减,脉冲产生器关闭,不发出脉冲。当阈值Eij[n]小于Uij[n]时,脉冲产生器启动,神经元再次被点火,输出结果Yij[n]为1[9]。
2.2 改进型PCNN网络模型
金属拉链由布带、链齿、拉头、限位码构成,其中链齿、拉头和限位码为金属材料,金属材料与拉链布带、背景三者颜色反差较大。缺陷类型主要有链齿缺失、间隔不均,拉头、左右限位码缺失等,如图2所示。
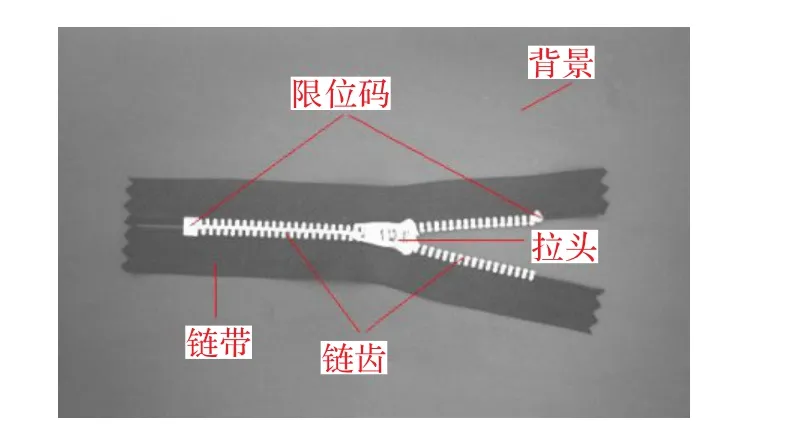
图2 合格拉链产品图
上述金属拉链图像不同材质之间灰度相差较大,金属部分各像素之间灰度性质相近,运用PCNN的同步脉冲发放特性能很好地分割目标图像。但传统PCNN模型一方面过于复杂,需要设置的相关参数过多,另一方面计算量较大,速度慢,难以满足拉链检测过程的需要。针对上述特点,本文对PCNN模型进行简化。简化原则是减少模型参数且保持模型实现图像分割的三个重要特性:(1)连接域特性,性质相近的神经元集群可输出同步脉冲;(2)内部活动项由反馈输入和链接输入经过调制产生,调节连接强度可调节神经元与其领域内神经元的影响强度;(3)阈值函数具有动态衰减特性,是神经元产生动态脉冲的根本原因。
因此,在实际系统中,神经元的反馈输入Fij[n]为拉链图像像素的灰度值Iij,连接输入Lij[n]为邻近神经元的脉冲输出值直接加权求和,忽略神经元上次迭代的连接输入Lij[n-1]的影响,内部活动项Uij[n]保持不变,ξ为 -100至10的常数,可对神经元点火条件进行微调。改进型模型如图3所示。
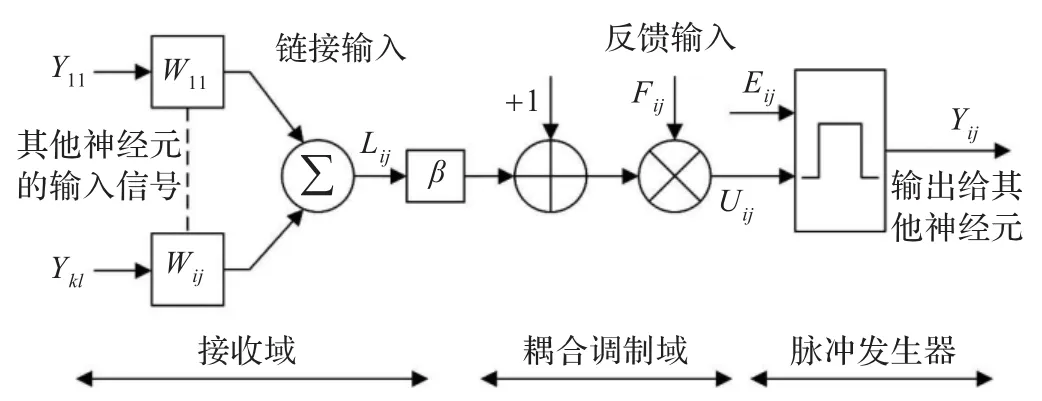
图3 改进型PCNN模型图
改进型PCNN数学模型如下:
3 金属拉链缺陷检测算法
3.1 基于改进型PCNN的图像分割
PCNN分割图像,通常灰度值较大的链齿部位像素对应的神经元先点火,发出脉冲信号。神经元的点火导致邻近具有相似灰度值的像素相对应的神经元捕获点火;邻近神经元的点火又捕获其周围性质相似的神经元点火,通过这种捕获点火的传播,使该区域内像素点灰度值相似的神经元集群发出同步脉冲。利用PCNN脉冲的这种传播特性即可实现图像的分割[10]。
3.2 拉头和限位码的提取
通常拉头和左右限位码的像素面积要远大于普通链齿的像素面积,因而可运用PCNN的自动波特性模拟形态学的腐蚀膨胀操作,在纤细点分离拉链的链齿,腐蚀像素面积较小的普通链齿部分,保留面积较大的拉头和左右限位码,并去除干扰噪声,最后运用膨胀操作还原拉头和左右限位码的原始大小和形状。
将图像进行灰度反转运算,背景区域对应的神经元最先点火,通过捕获点火使得目标区域的神经元点火,并保持点火状态,发放出脉冲,随着迭代持续脉冲在整幅图像中依次并行向外传播,目标不断收缩。将仅保留拉头和左右限位码的结果图像进行反转运算,实现对链齿的腐蚀操作。在此基础上,利用相似方法实现拉头和限位码的轮廓和面积还原[11-12]。
3.3 拉头和限位码缺失检测和定位
针对拉链特点,本文采用计算区域像素面积和形心来完成拉头和限位码缺失检测和定位。根据拉头、限位码在视野区域中的位置在图像中设置三个检测区域,分别计算拉头和左右限位码相应区域内的像素面积,根据各个区域的像素面积是否大于预设阈值,判断相应区域内是否存在相应部件。通过区域形心计算得到拉头和左右限位码的坐标。计算公式如下:

其中x、y分别为像素坐标值,A为图像像素点的个数。
3.4 金属链齿灰度跃变检测
根据垂直于边缘方向的像素值变化剧烈的原理,可通过检测沿拉链水平方向的像素灰度值跃变程度来确定边缘位置,进而确定每个链齿的准确坐标。
边缘的灰度跃变程度可用变化梯度来描述,拉链图像函数 f(x,y)的变化梯度可表示为:
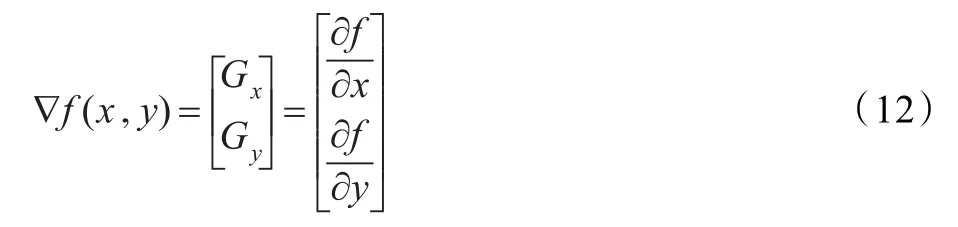
针对链齿沿边缘方向的图像灰度变化较小和图像离散性的特点,取Gy=0,式(12)可简化为:

其中 Ii,j为 [i,j]处像素的灰度值。
根据上述拉头和左限位码的区域形心定位获得的精确坐标,以左限位码为起始点,拉头为终止点设置扫描基准,沿扫描基准遍历所有像素,用后一像素的灰度值减去前一像素的灰度值 ΔIi=Ii+1,j-Ii,j,得到灰度变化程度ΔIi,若ΔIi大于预设阈值T,则该像素[i,j]处发生灰度值跃变,该点为链齿边缘,记录其坐标值;计算两个相邻边缘点的距离Di,通过判断Di是否大于预设阈值T实现对链齿缺陷检测。开叉部分的链齿缺陷方法类似。链齿灰度跃变检测算法原理如图4所示。
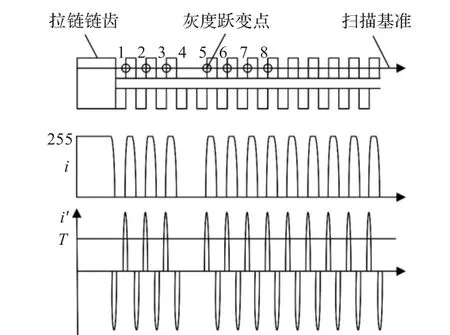
图4 链齿缺陷检测原理图
其中i为扫描基准上各像素点的灰度,i′为灰度变化程度。
3.5 检测算法流程
金属拉链缺陷检测算法包括对上述缺陷类型的检测,算法流程图如图5所示。具体步骤如下:
(1)从图像传感器中获取拉链图像,进行预处理;
(2)运用改进型PCNN算法对图像进行分割,提取链齿图像并进行灰度线性转换;
(3)利用PCNN对链齿图像进行腐蚀膨胀操作,腐蚀普通链齿部分,去除干扰噪声,保留拉头和左右限位码;
(4)分别统计计算拉头、左右限位码区域内的斑点面积和形心坐标;
(5)判断三个区域的斑点面积是否小于预设阈值,若是则输出相关部件的缺陷信号;
(6)由拉头和左限位码的坐标关系,将图像旋转至水平;
(7)设置检测基准和方向,分别对链齿的拉合和开叉部分进行灰度跃变检测,获取链齿边缘坐标,根据两个相邻链齿边缘的间隔距离判断是否存在缺陷。
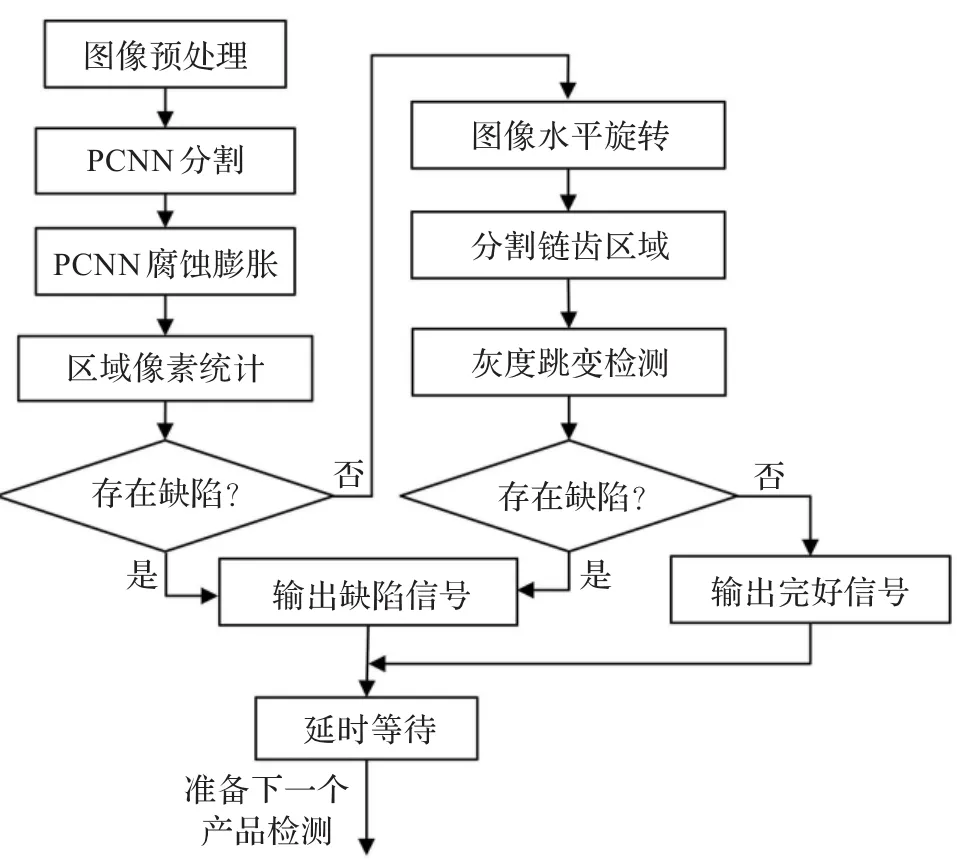
图5 检测算法流程
4 缺陷检测系统硬件设计
4.1 系统设计
针对上述拉链缺陷的检测方法和拉链生产线的工作特点,本文设计了金属拉链产品的在线缺陷检测系统。运用CCD工业相机获取生产线上每条拉链的灰度图像,使用上述图像处理技术和缺陷识别算法对产品进行检验,并向后续分拣机构输出相应操作指令。
硬件平台主要包括:定位传感器、图像传感器、光源密闭箱、传送皮带、分拣装置、PLC控制单元和工控机。其中图像传感器采用德国映美精公司的DMK21-AU04面阵式CCD工业相机,分辨率为640×480,配备9 mm的Computar镜头,背景光源装置使用奥普特OPT-LI29026白色条形光源,PLC使用三菱公司的FX1S-10MT-001,显示平台为Visual Studio 2008。CCD工业相机通过USB2.0接口与工控机连接。金属拉链缺陷检测系统硬件设计构成框图如图6所示。
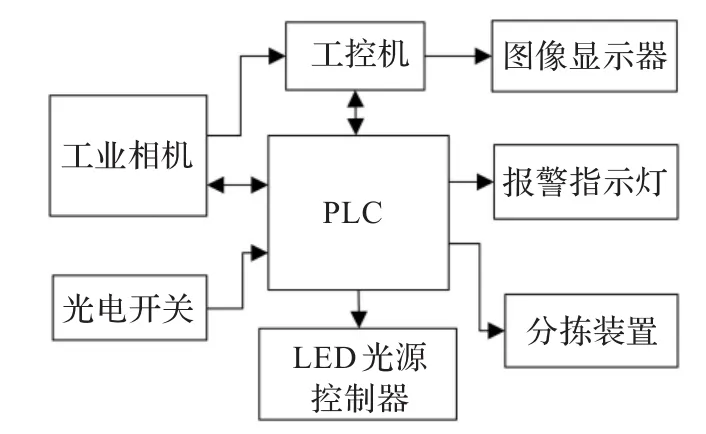
图6 检测系统结构
4.2 参数选择
PCNN中神经元只与欧氏距离小于等于3的相邻神经元链接,连接权由W 和M 决定,W、M 的大小和结构影响自动波的传播速度、方向和波阵面的形态;参数β的大小决定神经元与其领域内神经元的影响强度,使用较小的β可分割获取包含图像细节的二值图,而选取较大的β能得到图像轮廓的二值图;参数ξ能对阈值进行微调,较小的值能使分割的结果图像细节更加丰富,链齿更加完整,但容易被背景环境噪声干扰。显然,网络中的参数直接确定了系统的工作性能。
5 实验结果及分析
5.1 链齿图像的分割
取曝光时间为920 μs,采用上述改进型PCNN对获得拉链图像进行二值分割。其中加权参数向量W=[0.707 1 0.707;1 0 1;0.707 1 0.707],迭代次数 n=2;PCNN的其他参数通过遗传算法来获取。遗传算法采用8位二进制数编码,参数设置如下:总代数为50,种群数为20,交叉率为0.65,变异率为0.01;适用度函数采用图像信息熵函数法[13],表达式如下:

其中 p0、p1分别为输出序列Yij[n]中灰度为0、1的概率。
在主频2.59 GHz,内存2 GB的PC机上,运用Matlab7.0平台对算法进行多次实验,算法通常在进化到四至五代可获取最佳分割效果图。获取的PCNN参数如下:β=0.2,αE=0.1,ξ=5。二值分割后的结果如图7(b)所示。
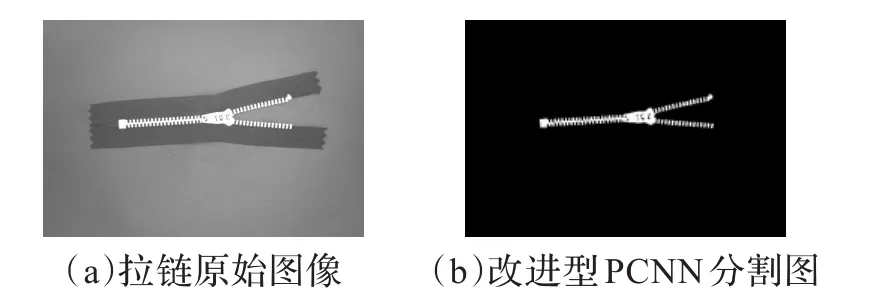
图7 原始图像及二值分割图
而采用传统的直方图法和OTSU法来分割金属拉链图,人工选择灰度直方图的双峰之间的谷底灰度值作为最佳分割阈值,大小为161,OTSU算法自动获取的阈值为0.481 2(即128),分割结果如图8所示。
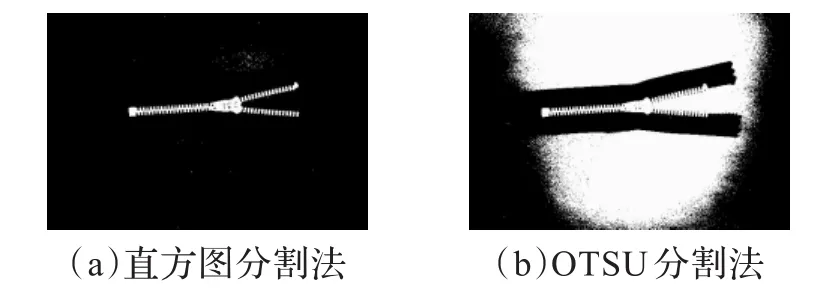
图8 由传统分割算法获得的二值图
使用传统的直方图分割法和采用计算类间方差的OTSU法,阈值的确定主要依赖于灰度直方图,忽略像素的空间位置关系,容易受背景噪声干扰,均不能准确分割出链齿部分;而基于改进型PCNN的二值分割算法能够更好地区分图像的背景和目标对象。由图7和图8对比可知,基于改进型PCNN的二值分割算法分割效果明显优于传统的阈值分割方法。
5.2 左右限位码和拉头的提取
在图7的基础上,运用PCNN对图像进行腐蚀膨胀运算,腐蚀掉普通链齿部分,去除干扰噪声,结果如图9(a)所示,然后进行膨胀运算,恢复拉头和左右限位码的原始形状,提取得到拉头和左右限位码的目标图像,结果如图9(b)所示。具体参数如下:W=M=[1 1 1;1 1 1;1 1 1];VL=1;VF=0.01;VE=0.02;β=0.5;αE=0.1;αF=5;αL=2;迭代次数 n=3。
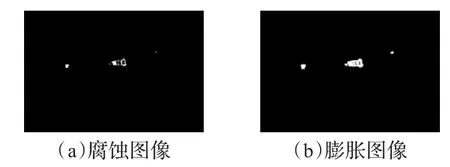
图9 由PCNN腐蚀、膨胀后的图像
使用半径为3和4的平面圆盘形结构元素分别对链齿图像进行腐蚀运算,提取拉头和左右限位码,处理结果如图10所示。

图10 由传统数学形态学的腐蚀结果图
由图10(a)可知,拉链拉合部分链齿没有被完全腐蚀,而图10(b)中右限位码被完全腐蚀。与PCNN处理结果相比,传统数学形态学的腐蚀算法是以结构元素集合运算为基础,处理结果取决于结构元素。结构元素选择不合理会导致上述缺点,而利用PCNN的自动波特性模拟腐蚀运算能有效提取目标。
5.3 限位码和拉头的缺失检测
对上述运算结果图9(b)进行区域像素面积和形心计算,分别统计三个目标区域内的像素数量,结果分别为157、725和34,均大于预设阈值100、400和10,得到左限位码坐标为(188,262)、拉头坐标为(359,252)和右限位码坐标为(480,216),左限位码、拉头与水平轴的夹角为3.35°,以拉头为旋转中心将图7(b)顺时针旋转3.35°至水平位置。若目标区域不存在拉头或左右限位码,则该产品为次品,如图11所示。
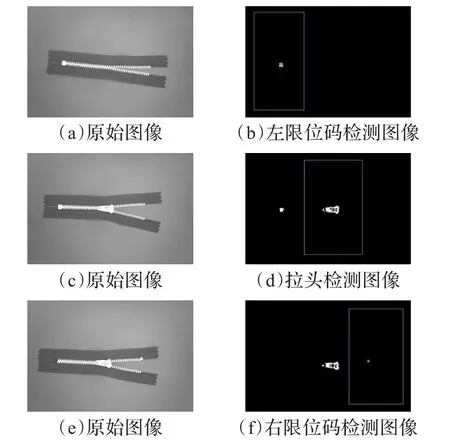
图11 限位码、拉头缺陷检测图
5.4 链齿缺陷检测
在限位码和拉头确认的基础上,对图7(b)运用灰度跃变的方法来获取拉合部分的链齿边缘坐标,记录链齿个数为20个,并计算每两个链齿的间隔距离,其中相邻两个链齿间隔距离为6、7和8个像素的数量分别为11、7和1,按照设计要求设定间隔距离阈值为10个像素,则说明该拉链拉合部分不存在缺陷情况。图12下图为沿扫描基准的灰度变化及灰度变化导数图。
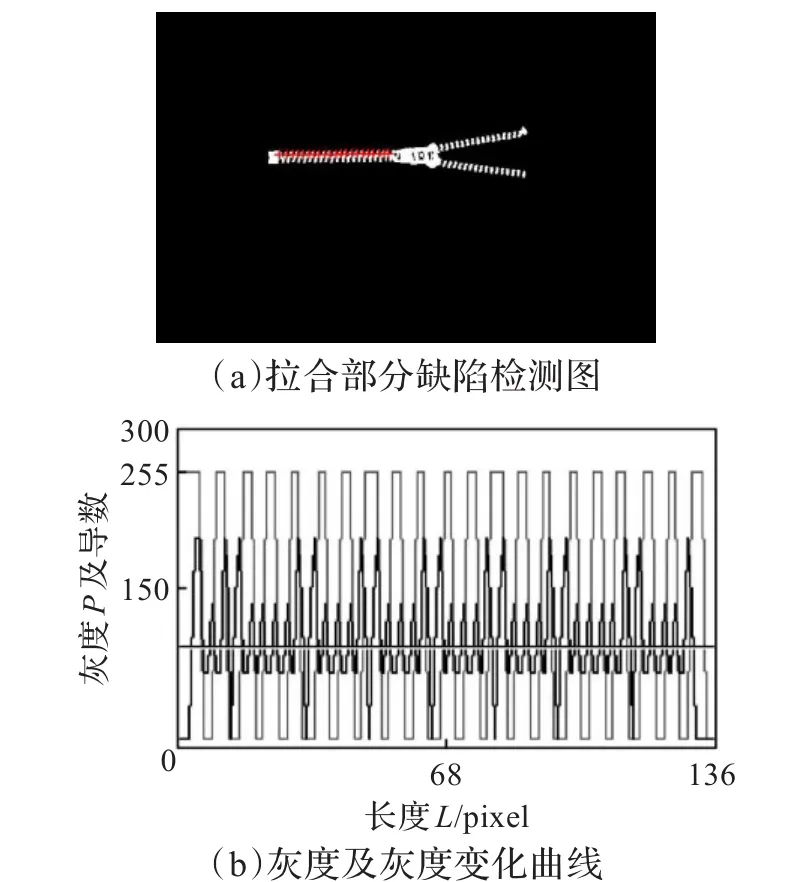
图12 拉合部分链齿缺陷检测
其中直线为阈值,浅色曲线为沿扫描线上像素灰度变化曲线,灰度值范围是0至255,深色曲线为灰度导数曲线,导数范围是0至1,其数值放大255倍后变化范围为0至255,下同。
同理得到链齿开叉部分的检测情况,检测到链齿个数为16个,间隔距离为6、7和8的数量分别为8、6、1,则不存在缺陷情况,如图13所示。使用相似方法完成其余链齿部分的检测,根据全部检测结果,判定该金属拉链产品为合格产品。

图13 开叉部分链齿缺陷检测
拉合部分缺齿情况检测如图14所示,经上述算法检测,拉头和左右限位码均存在,检测到链齿个数为22个,两个相邻链齿最大间隔距离为13,大于预设阈值10,则该产品为次品。
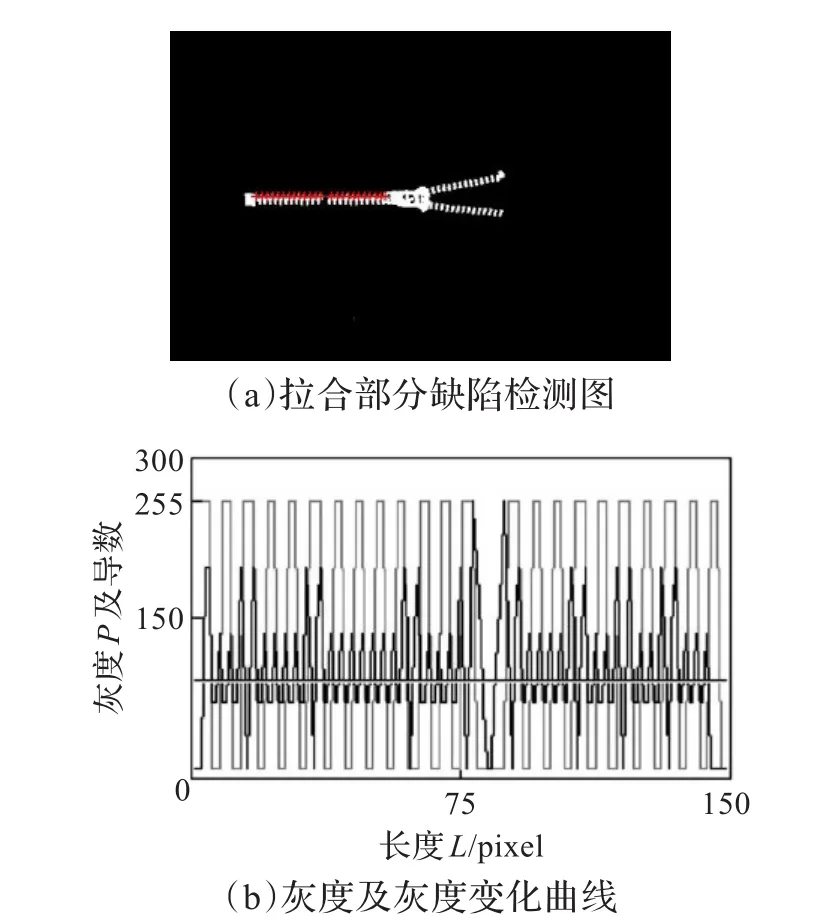
图14 拉链拉合部分链齿缺陷检测
同理开叉部分缺齿检测情况如图15所示,图中出现两个相邻链齿间隔距离为14,大于预设阈值10,因而认定该产品为次品。
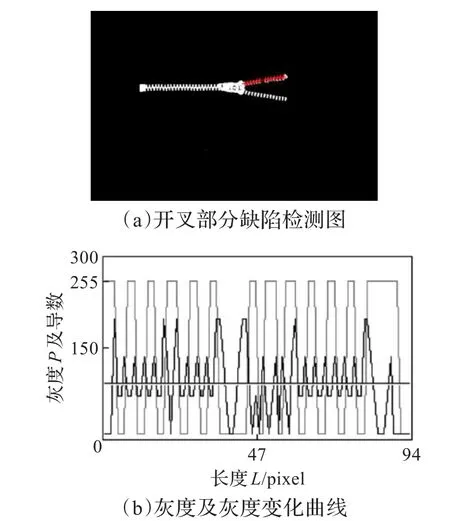
图15 拉链开叉部分链齿缺陷检测
通过对2 000条金属拉链进行检验,可得产品检验的出错率为0.5%,所出现的错判现象全部为合格产品被误判为次品,系统可满足生产的需要。
6 结束语
本文根据金属拉链特点提出了一种基于改进型PCNN的金属拉链缺陷检测方法,利用改进型PCNN获取金属拉链的二值分割图,提高系统速度,通过PCNN的数学形态学运用完成对拉头和限位码的提取,根据链齿灰度跃变的特性完成链齿缺陷检测。并设计了金属拉链自动检测系统,解决了现有人工检测方法存在的稳定性差、效率低和不能持久工作等问题,实现了金属拉链缺陷的在线检测。从实验结果来看,该方法能有效实现对金属拉链的检测,满足生产的需求。
[1]程西云,张婕敏.图像处理技术在拉链齿数检测中的研究[J].汕头大学学报:自然科学版,2006,21(1):65-69.
[2]杨智勇,周琪云,周定康.基于PCNN的灰度图像边缘检测方法[J].计算机工程与应用,2004,40(21):92-93.
[3]宋寅卯,袁端磊,卢易枫,等.基于最优PCNN模型的织物疵点自动检测[J].仪器仪表学报,2008,29(4):888-891.
[4]葛继,王耀南,张辉,等.基于改进型PCNN的智能灯检测机研究[J].仪器仪表学报,2009,30(9):1866-1873.
[5]聂仁灿,李莎,聂彩仁.脉冲耦合神经网络与最大相关准则的图像分割[J].计算机工程与应用,2009,45(35):202-204.
[6]李鹏阳,郝重阳,祝双武,等.基于脉冲耦合神经网络的刀具磨损检测[J].中国机械工程,2008,19(5):547-550.
[7]Eckhorn R,Reitboeck H J,Ardnt M.Feature linking via synchronization among distributed assemblies:simulation of results from cat visual cortex[J].Neural Computation,1990,2(3):293-307.
[8]Kuntimad G,Ranganath H S.Perfect image segmentation using Pulse Coupled Neural Networks[J].IEEE Transactions on Neural Networks,1999,10(3):591-598.
[9]黄传明,方千山.脉冲耦合神经网络在图像处理中的应用[J].仪器仪表学报,2006,27(S3):2143-2144.
[10]Ma Yide,Dai Ruolang,Li Lian.A counting and segmentation method of blood cell image with logical and morphological feature of cell[J].Chinese Journal of Electronics,2002,11(1):53-55.
[11]Su Maojun,Wang Zhaobin,Zhang Hongjuan,et al.A new method for blood cell image segmentation and counting based on PCNN and its autowave[C]//2008 IEEE 3rd International Symposium on Communications,Control and Signal Processing,2008:6-9.
[12]Li Bailiang,Xu Dacheng.Binary fingerprint image thinning using template-based PCNN[J].IEEE Transactions on Systems,Man,and Cybernetics,2007,37(5):1407-1413.
[13]马义德,戴若兰,李廉.一种基于脉冲耦合神经网络和图像熵的自动图像分割方法[J].通信学报,2002,23(1):1-4.
