基于LabVIEW的变电站绝缘子识别定位
2014-04-03赵天成施天贺
赵天成,王 帅,杨 雯,施天贺
(武汉大学,武汉 430072)
随着电力生产和控制技术的发展,智能化变电站实现无人值班和远方监控成为发展的趋势[1]。国外智能变电站的智能化巡检起步较早,技术更为先进,其智能巡检方式大多建立在GIS和GPS之上。2008年巴西圣保罗大学设计了主要应用于变电站设备热缺陷检测的悬挂式移动机器人,搭载红外热像仪的机器人悬挂在预定钢索轨道上,用来采集变电站设备温度,监控中心采用WiFi远程遥控机器人的动作。2007年山东鲁能公司推出了第三代500 kV变电站设备巡检机器人,对变电站母线、断路器、变压器等一次设备进行常规巡检,并且提供基于红外热像仪的温度检测报警功能。2010年山东青岛午山220kV变电站智能化改造中引入可见光照相机和红外照相机的变电站巡检机器人,主要用于热缺陷检测。该机器人采用了磁导航方式,可遥控或自主运行[2]。但国内变电站巡检机器人的研发水平局限于对现场进行图片拍摄,经过人工加以识别,并不是真正意义上的智能化,因而对机器视觉技术在智能变电站自动巡检系统的应用研究具有重要现实意义。
1 机器视觉系统的构成
机器视觉主要通过确定识别对象,通过图像采集装置对图像获取,通过图像处理算法对图像特征进行提取,最后通过识别算法完成识别工作。机器视觉系统流程图见图1。
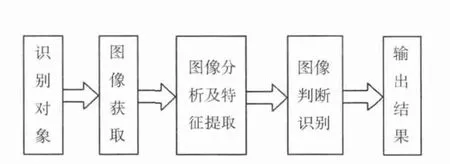
图1 机器视觉系统流程图
智能变电站巡检系统中的视觉系统主要是将机器视觉应用到变电站的无人巡检中。本文以变电站绝缘子作为研究对象,通过高清摄像头与红外摄像头同时获取图像,通过灰度化、二值化、腐蚀膨胀等一系列算法处理,提取变电站中绝缘子的特征参数,最后通过识别算法完成绝缘子的定位与识别。
2 绝缘子图像的特征提取[3]
2.1 图像灰度化处理
变电站中的绝缘子有着一系列影响识别的复杂背景,因此首先要对图像进行灰度化处理,去除复杂的背景颜色。灰度化处理可以针对颜色编码模式为RGB、HSV、YUV、HLS等图像进行处理,本文主要阐述最常见的RGB图像处理过程。
在RGB模型中,如果R=G=B时,则色彩表示一种灰度颜色,其中的R=G=B值即灰度值,因此灰度图像每个像素只需要一个字节存放灰度值(或称强度值、亮度值),灰度范围0~255。一般采用分量法、最大值法、平均值法和加权平均值法对彩色图像做灰度化处理。
由于人眼对绿色的敏感最高,对蓝色敏感最低,本论文选用基于人体生理学的加权平均值法:

式中:R(i,j)、G(i,j)、B(i,j)分别为红色、绿色、蓝色在(i,j)像素点的值。
LabVIEW软件中Vision Assistant快速VI中的Color Plane Extraction函数可以完成对彩色的RGB图像的灰度化处理(见图2b)。
2.2 灰度直方图变化
图像中的灰度种类较少时,可以对直方图进行均衡化处理。直方图均衡化就是把各个灰度级出现像素的概率尽量平均化处理,使直方图曲线趋于平坦,常用的典型变换函数为:

式中:s(i,j)为(i,j)像素点的灰度值;r为灰度值变量。
Vision Assistant快速VI中的Histogram函数可以求得图像的灰度直方图。
2.3 图像二值化处理
观察灰度直方图,找到波峰与波谷。将波谷所在位置的灰度值设置成为阈值,大于等于这个阈值的将像素变成1(即黑色),小于阈值的将像素变为0(即白色)[4]。经过二值化处理之后的灰度图见图2c。
2.4 腐蚀与膨胀处理
2.4.1 腐蚀处理
腐蚀处理能够使绝缘子图像中比背景暗的部分得到了扩张,比背景亮的部分得到了收缩。选用不同的结构元、不同的腐蚀次数能使得腐蚀后的图像一定程度上消除图像中孤立的噪点和削弱边界轮廓。
2.4.2 膨胀处理
与腐蚀运算相反,膨胀运算能够使绝缘子图像中比背景亮的部分得到了扩张,比背景暗的部分得到了收缩。同样,选取不同的结构元不同的膨胀次数能扩大图像中物体的轮廓,能够使得原本不相连的几个物体组合成一个物体。在一定情况下这样更利于识别的进行。
腐蚀与膨胀处理之后见图2的d、e。
3 绝缘子的形态模式识别与定位
3.1 绝缘子图像的边缘提取
对绝缘子图像进行边缘提取有利于得到图像中有用部位的参数特征量,同时可以便于对绝缘子或者其他仪器设备进行物理参数的测量。
LabVIEW软件中的可以实现Canny算子的边缘检测。
3.2 绝缘子识别与定位
经过处理之后的绝缘子图片可以用来完成绝缘子的定位与识别。在LabVIEW中可以通过IMAQ Count Objects 2VI来完成提取绝缘子在图片中的位置。首先提取绝缘子的位置,然后LabVIEW的Count函数的连通域检测方法来得知图片中所存在的物体的个数,并且检测每个连通区域上下左右4个顶点的坐标,则目标区域将包含在以此上、下顶点横坐标和左右顶点纵坐标构成的矩形之中。将图片转化为二维矩阵,然后使用以上4个坐标将矩阵中对应的子矩阵截取出来,实现单个目标的分离。

图2 绝缘子特征提取过程
如果图片中的两个物体相距较近,则有可能一个物体的部分区域被截取到与之相邻的另一个物体的矩形子图片之中,此时必须对子图片中多余的区域进行清除。文中所采用的是面积比较和连续边缘点判断共同作用的方法来清除图片中多余的区域。其中面积计算是对连通域中像素点的累加,连续边缘点是指在图像边缘上属于连通域的连续的像素点的个数。当某一区域的面积不是这个子图片中最大的,并且在子图片边缘有几个连续像素时就可以判断此区域为非目标区域,将其像素灰度值全部赋值为0,则可实现非目标区域的清除。
由于绝缘子具有对称的特征,设绝缘子的像素高度为H,H的大小可由单个目标分离后的子图片的像素高度得知,绝缘子的中心点坐标为a(x0,y0),绝缘子的倾斜角度为α,则绝缘子轴线的方程为:

由于图片是以数组形式存储,图片中的坐标是以左上角为原点,行方向为x轴,列方向为y轴,所以需要进行坐标变换,设坐标变换之后的绝缘子的中心点坐标为a1(x1,y1),仍使用坐标变换前的倾角α,则坐标变换后的轴线方程为:

4 仿真试验
智能变电站无人巡检视觉系统如图3所示。系统由机器人模块、无线传输装置和上位机构成。机器人模块主要包括传感器部分、GPS导航系统,和图像采集装置。传感器与GPS用来实现智能小车的路线归来和蔽障。

图3 智能变电站无人巡检视觉系统
仿真试验基本上成功找到了绝缘子的轴线位置与连通域。通过二值化处理之后变成完全的黑白图像,再经过腐蚀膨胀处理后去除噪点,通过Lab-VIEW的Count函数成功的找到了绝缘子的连通域,通过位置确定算法成功地找到了绝缘子的对称中心线,实现了绝缘子的识别与定位。
5 结束语
本文针对目前智能变电站无人巡检系统的研究现状,提出了基于LabVIEW的绝缘子视觉识别定位。通过对绝缘子图像的灰度化处理、二值化处理、腐蚀膨胀等处理,识别出了绝缘子在图片中的位置,同时找到了绝缘子的轴线位置,实现了绝缘子的定位与识别。基于LabVIEW的绝缘子图像的处理与识别定位研究,有助于今后智能变电站变电站设备的故障识别以及无人巡检视觉系统的深入研究。
[1]洪宪平.走向网络化的远动系统[J].电力系统自动化,2001,25(6):1-3.
[2]李向东,鲁守银,王宏.一种基于变电站使用的移动机器人介绍[J].山东电力技术,2005,(03):3-6,10.
[3]章毓晋.图像工程[M].北京:清华大学出版社,2012.
[4]梁华为.直接从双峰直方图确定二值化阈值[J].模式识别与人工智能,2002,15(2):253-256.
