基于事件触发的遥感产品生产的数据流模型研究
2014-04-01,,,
,,,
(河南大学 计算机与信息工程学院,河南 开封 475004)
近几年来,随着国产高分辨率卫星如HJ、ZY3、GF1的发射,遥感应用在各行各业中的需求也越来越多,这就要求遥感产品生产流程或遥感图像处理算法的开发更方便快捷。以前的遥感产品生产数据流模型只能对自动化的遥感产品生产流程进行描述,但是在实际的遥感产品生产中,有的过程需要人工干预,所以以前的数据流模型并不适合描述实际的生产流程。基于算法组件化思想,用可视化的数据流模型能很好地对遥感产品的生产流程进行抽象和概括。算法组件化是将已有的算法以“搭积木”的形式组合成新的算法。
本文提出的基于事件触发的遥感产品生产的数据流模型,用可视化的方式对自动和人工两种不同生产驱动模式下的生产过程进行描述,能更好地反映遥感产品实际的生产流程。
1 相关的工作
目前对于遥感产品自动化生产的研究主要是用工作流模型或者流程图模型对其生产流程进行描述[1-4]。但工作流模型或流程图模型只能反映算法组件之间的调用次序关系,不能直观全面地反映出算法组件与被加工数据之间的关系。数据流模型不仅能直观地反映数据的处理过程,而且可以反映算法组件与被加工数据之间的关系。也有一些研究将数据流模型应用到遥感产品的生产中[5]。
目前数据流的驱动方式可以分为数据驱动和命令驱动[6]。本文提出的基于事件触发的遥感产品生产的数据流模型,将数据驱动和命令驱动结合起来,采用与多数操作系统的运行机制相协调的触发机制,不仅能直观、形象地体现出算法与算法、算法与数据之间的关系,而且能够对自动和人工两种不同生产模式的遥感产品的生产流程进行描述,从而能更方便快捷地开发出符合生产实际的遥感产品工作流程或新算法。
下面以高分数据为数据源,用以前的数据流模型描述植被覆盖度产品(Vegetation Condition Index,VCI)的生产流程,如图1所示。
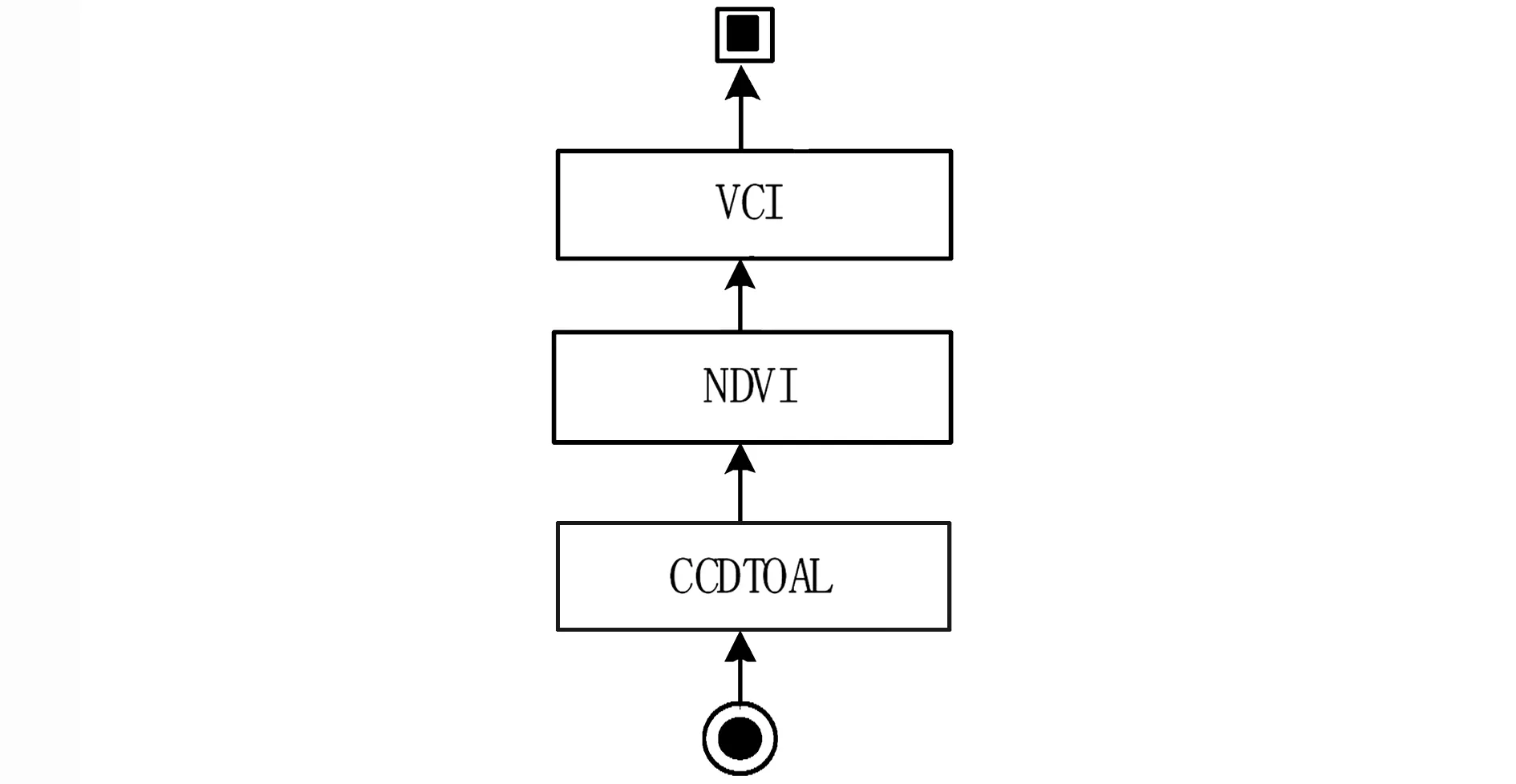
图1 VCI生产流程的数据流模型

但在实际生产过程中,由于用户对遥感产品的精度要求高或者其他的应用需求,遥感产品的生产流程并不是严格按照图1中的流程一步一步地调用算法组件,而是在调用CCDTOAL组件之前,需要对原始影像数据进行几何预处理,而几何预处理过程需要进行人工操作,以提高几何影像的精度。调用完VCI算法组件后,对产品进行简报制作、人工制图等人工处理操作,最后形成应用产品。在人工处理完成之前,这些数据处于不可用状态;当人工处理完成后,会有一个事件信号表示数据已经处于可用状态,可继续进行下一步的生产。图1所示的数据流模型难以反映这种情况。
本文提出的数据流模型不仅能很好地描述自动化和需要人工处理的遥感产品的生产,更能真实地描述遥感产品的实际生产过程。
另外,为了更加直观地表现整个生产流程,本文给出了该数据流模型的可视化表示方法。
2 可视化的数据流模型
本文提出的基于事件触发的遥感产品生产的数据流模型由若干可视化节点组成。通过这些可视化节点的组合,描述一个遥感产品的生产流程。这些可视化节点分为如下几类:
(1) 数据流:代表数据流动的方向以及该数据达到可用状态的事件信号。可视化符号为:→▷→,其中箭头指明数据流方向,空心三角代表事件信号。带箭头的一端称为数据流的入端,另一端称为数据流的出端。数据流可以分叉,代表同一数据流的不同流向。
(2) 数据源节点:代表外部数据的来源。可视化符号为⦿。该节点只能和数据流的出端相连,可以和多个数据流连接。两个数据源节点代表两个不同的数据源。从不同的数据源节点引发的数据流是不同的。
(5) 人工处理节点:代表某种需要人工干预才能完成的生产加工,比如输出生产参数、选择控制点等。可视化符号为。该节点只能和一个数据流的入端连接,也只能和一个数据流的出端连接。
以上节点都可以命名,使其具有特定的具体含义。两个命名相同的节点,其含义是完全相同的。同名的节点最好只出现一次,但必要时也可以出现多次。
由以上节点相互连接组合构成的无环有向图,形成一个可视化数据流模型,代表了遥感产品生产流程。
3 数据流模型的应用
信息产品生产分系统、信息集成共享与服务分系统、综合数据库分系统、实验验证分系统共同构成应用技术中心系统。其中,信息集成共享与服务分系统负责接收各类用户提交的产品订单;综合数据库分系统负责存储生产所需的影像数据、算法组件以及生产的产品;实验验证分系统负责对生成的产品进行质量检验;信息产品生产分系统是应用技术中心系统的重要组成部分,主要功能是从信息集成共享与服务分系统接收产品订单,根据遥感产品的生产流程,分配合适的计算资源对遥感影像进行加工处理,最后形成遥感产品。
本文提出的数据流模型应用于信息产品生产分系统,不仅能直观全面地反映出算法组件、人工处理和被加工数据之间的关系,还可以根据现有的算法组件快速地开发出新的遥感产品生产流程。根据本文提出的数据流模型,信息产品生产分系统将遥感产品的生产模式分为常规模式和应急模式两种生产模式。
应急模式(即自动化模式)下,不需要几何预处理、人工制图等人工操作,由系统自动完成遥感产品的生产。
常规模式(即人工模式)下,由于传感器、地形、云以及人为因素的影响,卫星拍摄的遥感影像都有或多或少的变形,而对于精度要求高的遥感产品的生产,影像数据在进行生产之前必须经过几何特征点提取、几何特征校验、几何纠正等一系列的几何预处理[10-11],以提高影像的精度。在生产后期,根据一定的标准对产品进行质量检验、人工制图等人工操作,最后将产品自动存储起来。
下面以归一化植被指数产品(NDVI)为例,阐述本文提出的数据流模型在自动化和人工模式两种不同的生产模式下遥感产品生产中的应用。
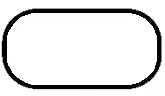
图2 NDVI自动化模式的数据流模型
生产流程描述如下:在自动生产的过程中,遥感影像原始数据不需要预处理,生产CCDTOAL产品需要的遥感影像数据处于可用状态时,会自动触发CCDTOAL组件调用该影像数据进行生产;CCDTOAL产品生产完成后,内部线程会产生一个状态可用事件来触发NDVI组件的生产;NDVI加工完成后,自动产生触发存储模块的信号,使存储模块将生产完成的产品存储起来。
在常规模式的生产过程中,遥感影像原始数据在生产之前需要几何预处理。几何预处理包括:几何特征点自动提取、几何特征检验、几何纠正,几何特征检验需要对几何特征点自动提取的结果进行检验,手动删除、改正误差较大的控制点或添加新的控制点。质量检验对生产的产品进行人工校验,如果产品合格则存储起来。
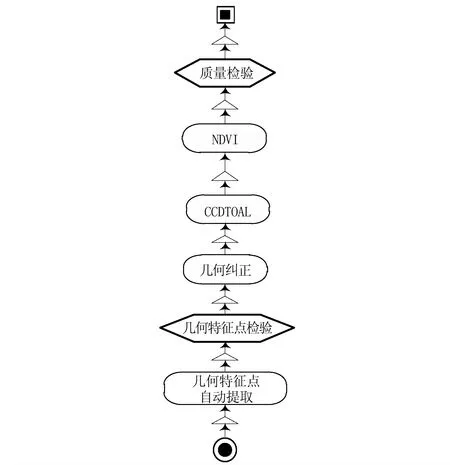
图3 NDVI人工模式的数据流模型
生产流程描述如下:在几何预处理之前,遥感影像原始数据会自动触发几何特征点提取模块;当提取完成后,产生一个事件触发信号提醒人工操作——几何特征检验;当人工操作完成后,自动触发几何纠正模块;当几何预处理完成后,用于生产CCDTOAL的影像数据处于可用状态并产生一个信号,触发CCDTOAL组件调用几何预处理后的影像数据进行生产;CCDTOAL产品生产完成后,触发调动NDVI组件,生产出NDVI产品;最后对NDVI产品进行人工检验,检验合格后自动将产品存储起来。
有的产品需要形成专题产品,生产中需要一系列的人工操作。下面以土地利用分类(Land Use Classification, LUC)产品为例,阐述本模型在人工模式遥感产品生产中的应用。
计算机分类所用时间短,没有目视解译的分类精度高,特别是在土地种植物复杂、地块面积较小的遥感影像分类中[12]。因此,土地利用分类产品的生产过程不仅需要调用土地利用分类组件,还需要一些人工操作,如人工分类、人工制图等。以前的数据流模型只能体现出要调用的算法组件,体现不出产品生产过程中需要人工干预的操作步骤。本文提出的数据流模型能更好地描述基于人机交互分类的土地利用分类产品的生产流程。
用本文提出的数据流模型描述LUC产品的生产流程,如图4所示。遥感影像原始数据自动触发LUC算法组件,调用LUC算法组件后会有一个事件触发信号,表示LUC产品数据处于可用状态,并触发人工分类模块,人为修改相应的土地分类信息;当人工分类完成后,产生一个信号,表明人工分类后的LUC产品数据处于可用状态;然后人工添加标题、图例、比例尺等信息,当制图完成后,触发系统的自动存储模块,完成产品的存储过程。
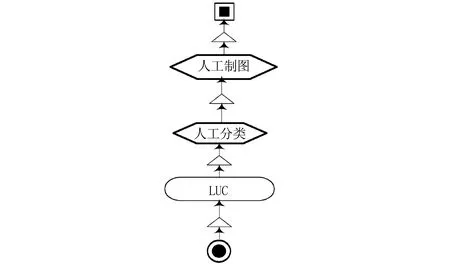
图4 LUC人工模式的数据流模型
可见,利用本文提出的数据流模型,不但能体现出要调用的算法和被加工数据,还能具体地体现出生产过程中的人工处理,很适合描述实际的遥感产品生产流程。而且对于人工操作的模块,可以进行批量处理,从而实现任务上的并行处理,提高CPU的利用率。
4 结 语
本文提出了5种可视化节点来描述自动化模式和人工模式处理的遥感产品生产流程,并以信息产品生产分系统生产的NDVI 和LUC两种遥感产品为例,阐述了基于事件触发的遥感产品生产的数据流模型在实际遥感产品生产中的应用。该模型不仅能够很好地描述自动化模式和人工模式处理的遥感产品的生产,而且能很好地与多数操作系统所采用的基于事件驱动的运行机制相协调,提高CPU的利用率,从而可快速、方便地开发出符合实际的遥感产品生产流程。
参考文献:
[1] 夏登文, 王宏, 石绥祥, 等.支持海洋遥感信息提取技术的可视化建模系统流程设计[J].海洋学报, 2005, 27(3): 97-103.
[2] 魏建新, 魏东琦, 吴信才.遥感可视化建模工具的工作流模型及分布式调度算法[J].干旱区地理, 2009, 32(2): 304-309.
[3] 李景山, 陈元伟, 刘定生.基于工作流的新一代多卫星地面预处理系统设计与实现[J].遥感技术与应用, 2008, 23(4): 428-433.
[4] 李晓琳, 曹健.事件驱动的服务工作流的数据流模型[J].计算机应用与软件, 2009, 26(6):105-106.
[5] 周兵, 李家国, 吴贯锋, 等.面向遥感产品生产的可视化数据流模型[J].河南大学学报(自然科学版), 2013, 43(1): 74-78.
[6] 杨旭波, 蔡文立, 石教英.通化可视化平台GIVE之数据流核心模型的设计与实现[J].中国图象图形学报, 1997, 2(2-3) 153-156.
[7] 陈骏, 沈盈佳, 曾建军, 等.基于RS的昆明市植被覆盖度变换动态分析[J].林业调查规划,2013, 38(5): 10-13.
[8] 马红斌, 王庆, 王秦湘.基于NDVI的多沙粗沙区植被覆盖度研究[J].人民黄河, 2012, 34(12): 94-95,111.
[9] 池宏康, 周广胜, 许振柱, 等.表观反射率及其在植被遥感中的应用[J].植物生态学报, 2005, 29(1): 74-80.
[10] 郑盛, 赵祥, 张颢, 等.HJ-1卫星CCD数据的大气校正及其效果分析[J].遥感学报, 2011, 24(8): 709-721.
[11] 宋洁.遥感影像几何纠正的模型研究与应用[D].西安:西安科技大学, 2013: 14-34.
[12] 陈玲.土地利用更新调查中遥感图像分类的方法和精度对比的研究[D].山西: 太原理工大学, 2010: 37-44.
