多回转阀门执行器逆止机构的设计和分析
2014-04-01,,
, ,
(中原工学院,郑州 450007)
目前在多回转阀门执行机构的主减速部分中多采用行星轮系和蜗杆传动结构,当动力由电机输入时,齿圈固定,无论电机正向或反向旋转,电机动力均可以通过主减速机构的太阳轮传递到行星轮,最终由行星轮带动行星架旋转,从而输出动力。当遇到电机故障、突然停电、调试等情况时,需要将执行机构调到手动输入状态,此时,将太阳轮固定,无论手轮正向或反向旋转,通过手轮驱动蜗杆,带动与涡轮一体的主减速机构的齿圈,再由齿圈带动行星轮和行星架旋转,可实现动力输出。现行的多回转阀门执行机构多采用离合器和制动器来实现机构的停止,机构复杂,而且由于离合器和制动器会出现打滑现象,不能保证快速、平稳地切断行星齿轮机构与电机之间的动力传递,因此有必要设计开发一种更符合要求的制动装置。
1 逆止机构设计要求
多回转阀门电动执行机构在手动正、反向输入时,要求主减速机构的行星轮快速、平稳地制动,防止动力向电机传递。因此,逆止机构的设计必须满足以下要求:①能够产生足够的制动力,而且制动平稳可靠,噪声小[1];②结构简单、紧凑,并且有足够的强度和刚度;③操作方便,易于制造,便于加工和装配,且生产成本较低;④电机输入时双向传递扭矩,当切换为手动输入装置时,能够迅速、精确地双向锁死电机,保证多回转阀门执行机构地正常工作。
2 逆止机构的结构和工作原理
逆止机构由锁销①、滚子安装块②、锁销③、弹簧架④、齿轮连接块⑤、逆止钢套⑥和弹簧⑦等组成,结构如图1所示。
逆止机构的工作原理:逆止钢套⑥固定不动,齿轮连接块⑤的工作表面和逆止钢套⑥内表面形成楔槽,4个圆柱锁销通过2根弹簧⑦和4个弹簧架④安装在楔形槽内,其中弹簧⑦的刚度很小,其作用仅是将4个钢球推向两侧,静止状态下不足以将机构自锁。滚子安装块②和齿轮连接块⑤之间的间隙△应精确设计(尽可能小),当电机驱动图中直齿轮转动时,直齿轮带动滚子安装块②旋转一微小角度即可驱动齿轮连接块⑤及锁销③等同步旋转,从而由齿轮连接块⑤通过键驱动锥齿轮轴运动而传递动力,无论电机正向或反向旋转,均可传递动力。当采取手动驱动时,动力将由锥齿轮输入,若按图中所示的顺时针方向旋转,则锥齿轮将通过键带动齿轮连接块⑤一起旋转,在转动的瞬间,由于齿轮连接块⑤和滚子安装块②之间存在间隙△,因此齿轮连接块⑤不会驱动滚子安装块②转动,从而不能将动力反传至电机;同时,在摩擦力作用下,锁销③及其对角的锁销被楔紧在楔槽内形成自锁,因此,齿轮连接块⑤和锥齿轮轴固定不动。同理,当锥齿轮逆时针旋转时,在摩擦力作用下,锁销①及其对角锁销形成自锁,从而使逆止机构实现了动力反向输入时的双向自锁。
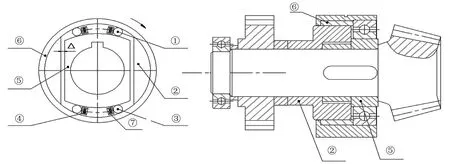
图1 逆止机构结构简图
3 设计理论和设计过程
3.1 自锁条件
根据结构分析,有些机械只要加上足够大的驱动力,就能够沿着有效驱动力作用的方向运动。实际上由于摩擦力的存在,就会存在无论这个驱动力如何增大,也无法让其运动的现象,这种现象就是机械自锁[2]。判断机械自锁的条件如下:①机械所含的某个运动副发生自锁;②机械效率η≤0;③机械阻力F≤0;④机械驱动力的有效分力Ft≤Fmax(本身所引起的最大摩擦力)。
根据动力反向输入时机械效率η≤0的判定条件,假设每个锁销的受力情况完全相同,取任意一锁销进行受力分析[3],如图2所示。N1、N2代表作用于A和B点的法向力,F1、F2分别为滚子安装块和逆止钢套对锁销的摩擦力,Q1、Q2分别为滚子安装块和逆止钢套对锁销的总作用力,QS为作用于锁销上的弹簧力,φ为动摩擦角。
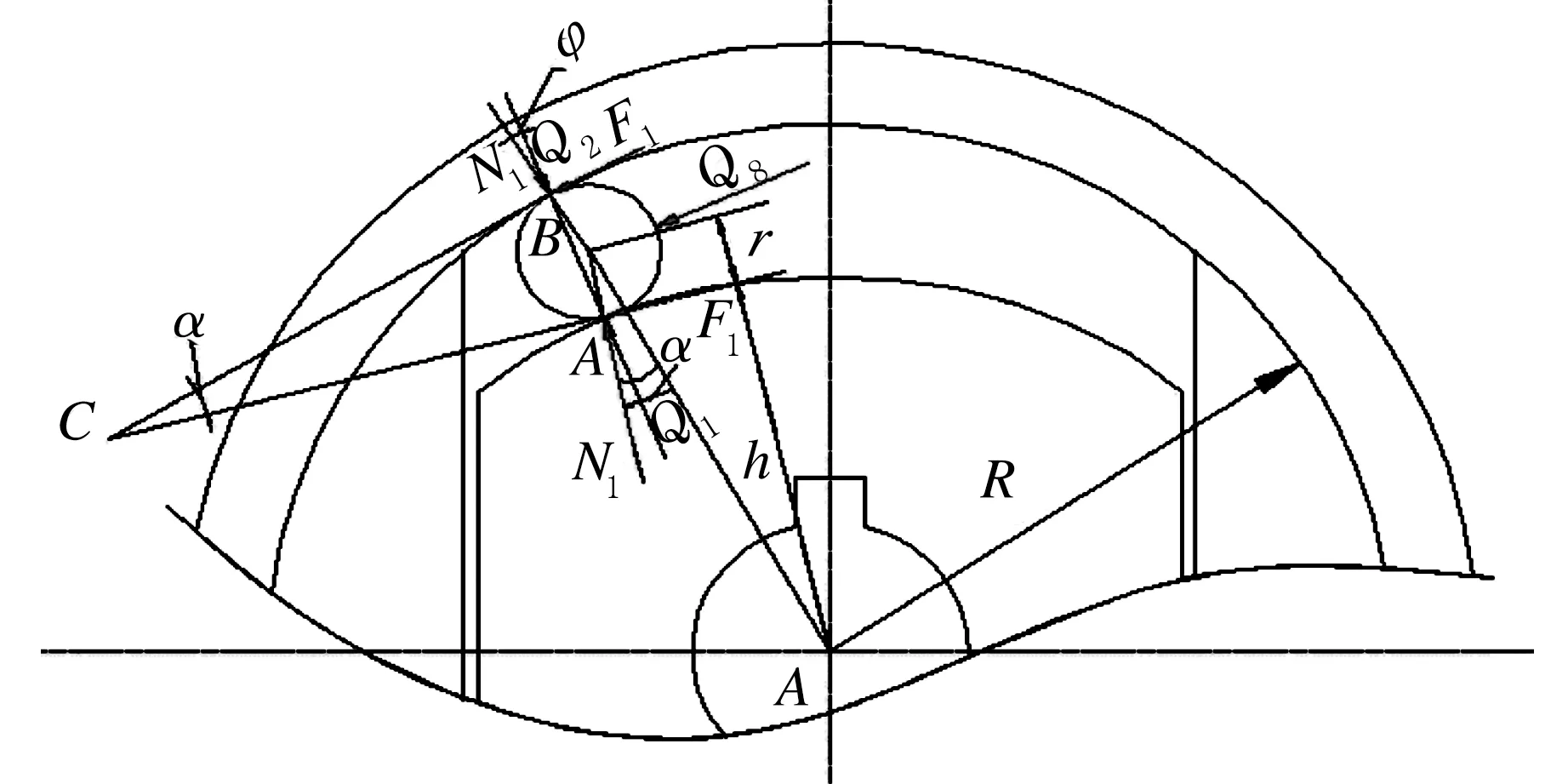
图2 锁销受力分析
若使锁销能够在楔槽狭窄部分卡住形成自锁,则
(1)
(2)
(3)
其中:
FR——Q1和Q2之间的合力;
FR0——当φ=0时,理想状态下锁销受到的总作用力;
Q10——当φ=0时,理想状态下滚子安装块对锁销的总作用力;
Q20——当φ=0时,理想状态下逆止钢套对锁销的总作用力;
α——楔紧角,即临界状态时,滚子安装块和逆止钢套作用在锁销上摩擦力F1和F2的夹角。
3.2 锁销数目及半径的确定
多回转阀门逆止机构的锁销数目和半径要根据传递扭矩的大小和装置的结构尺寸决定。一般锁销数目为4个或6个,当扭矩大时可以多于6个。根据机械设计手册,参数C1=8~9,C2=1.5~2,C1=R/r,C2=l/2r,即r=R/8,l=(3~4)r,其中r为锁销的半径;l为锁销的长度;R为逆止钢套的内表面半径,由工作时传动扭矩决定。锁销、逆止钢套和滚子安装块由滚动轴承钢GCr15或渗碳钢制造,热处理后工作表面硬度要求大于62 HRC[4]。
设滚子安装块的工作面距离圆心的距离为h,动摩擦系数为f,如图2所示。由静力平衡条件可知,锁销达到摩擦自锁的临界状态时,应满足自锁条件
α≤2φ
(4)
由图2可得
α=arc cos[(h+r)/(R-r)]
(5)
由机械摩擦自锁原理得
φ=arctanf
(6)
将式(2)、(3)代入式(1)得
r≥(Rcos2φ-h)/(1+cos2φ)=
[(1-f2)R-(1+f2)h]/2
(7)
又因锁销可以在槽内运动,则
r≤(R-h)/2
(8)
综上可得
[(1-f2)R-(1+f2)h]/2≤r≤(R-h)/2
(9)
若结构尺寸R、h及使用材料的动摩擦系数f已知,根据公式(9)可以计算出锁销半径r。若齿轮连接块和滚子安装块之间的间隙为△,当R、h和f不发生变化时,圆心到某工作面的距离h随着l的增大而增大。当l过大时,锁销在槽内自由运动,无法楔紧,且产生较大的噪声;当l过小时,动力反向输入时机构无法实现双向逆止。
根据机械制造工艺的装配要求,综合自锁条件和结构尺寸的计算要求,设计出了多回转阀门执行器逆止器。该逆止机构已经在多回转阀门执行机构的设计项目中得到实际运用,制动效果显著。但是逆止机构在使用一段时间后,会出现因摩擦严重自锁能力下降或不能工作的情况,可对滚子安装块进行加工,更换锁销尺寸,进行装配。
4 结 语
利用机械摩擦自锁现象设计的多回转阀门执行器的逆止机构,经过实际应用,被证明运动可靠,定位准确,大大提高了机械传动的安全性。相对于反传动双向逆止器,该机构结构简单,便于生产,制造成本较低。为了详细了解逆止机构的自锁特性,有必要继续对锁销和滚子安装块、逆止钢套的接触状态进行分析,利用有限元对接触强度和承载能力进行分析,为优化设计提供理论基础。
参考文献:
[1] 崔海梅,来淑梅,宋廷彬,等.反传动双向逆止器的设计与分析[J].机械设计与制造, 2009(1): 23-24.
[2] 孙恒,陈作模,葛文杰.机械原理(第7版)[M].北京:高等教育出版社, 2006: 71-76.
[3] 詹姆斯,利赛·韦伯.双向锁止驱动离合器总成[J].国际专利,2005(6):15.
[4] 濮良贵,纪名刚.机械设计(第8版)[M].北京:高等教育出版社, 2006: 11-16.
