基于自适应遗传算法的EPS路感研究
2014-03-28贾满满朱景全
贾满满,朱景全
(商丘师范学院物理与电气信息学院,河南商丘476000)
汽车转向过程中,转向阻力包含有前轮侧向力信息,使汽车的运动状态(包括车轮与路面的附着状态)与驾驶员手力有对应关系,这就是所谓的“路感”。汽车转向过程中的转向轻便性与路感是相互矛盾的,转向轻便性要求转向系统能够提供大的助力,但助力增加后路感就会变差。转向轻便性是对汽车低速行驶时提出的要求,而路感是对汽车高速行驶时提出的要求。驾驶员在行驶时只有准确地掌握汽车的行驶状况,才能正确地操纵汽车。因此良好的路感是操纵稳定性重要组成部分。
在机械转向系统中,转向力是由驾驶员的手动操舵力矩组成,本文所研究的电动助力转向系统的转向力是由驾驶员的手动操舵力和电动机提供的助力两部分构成,因而转向路感受到电动机助力的影响。电动转向系统一个重要的特性是可以增强驾驶员的转向路感,如何既满足汽车低速时转向轻便性又可以在高速时获得良好的路感是研究的重点。本文以汽车转向路感为出发点,其分析方法不仅仅停留在路感的定性分析上,而对路感进行了理论分析和量化处理,应用自适应遗传算法对系统参数进行了优化设计,从而使驾驶员获得良好的路感。
1 EPS系统模型
EPS(Electric Power Steering System)系统由扭矩传感器、电动机、车速传感器、电子控制单元ECU、减速机构等组成。为分析问题方便,把转向机构及前轮向转向柱简化,简化后的EPS系统模型如图1所示[1-2]。设方向盘的转动惯量、前轮及转向机构向转向柱等效后的转动惯量、电机的转动惯量分别是Jh,Jc,Jm,转向盘上施加的扭矩、等效到转向柱的转向阻力、电机的电磁转矩和电机作用到转向柱的助力分别是Td,Tr,Tm,Ta,转向盘与支承间的摩擦系数、等效到转向柱的转向结构与前轮间的摩擦系数、电动机转轴与支承间的摩擦系数分别是Bh,Bc,Bm,方向盘转角、电机转角与前轮等效到转向柱的转角分别是θh,θm,θc,扭矩传感器刚度是ks,从电动机到转向柱的传动比是G1。方向盘与支承间、等效到转向柱的转向机构与前轮、电动机转轴与支承间的摩擦力分别是f(,θh),得到如下各部件的数学模型。
方向盘与前轮的动力学模型:

电动机对转向柱提供的辅助力Ta可由电机的动力学方程得到。

式中,kt,ia分别为电机的电磁转矩常数和电流。
电动机的电气数学模型:

式中,R,L,ke分别为电机的电枢电阻、电感和反电动势系数。
扭矩传感器的数学模型是:

为分析问题方便,设电机转轴是刚性的,不考虑电机的扭转刚度,仅考虑电动机与转向柱间的速度匹配,有

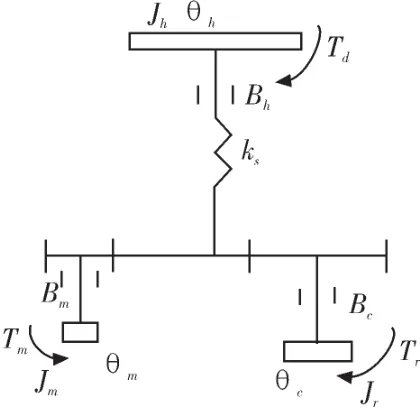
图1 EPS系统动力学模型Fig.1 The dynamics model of EPS system
2 路感的定义
转向路感是路面信息到方向盘手力的传递特性。即把转向路感定义为从负载到手力的传递特性[4]。EPS系统应具有较好的抗干扰能力,以抑制高频噪声和干扰信号。为分析EPS系统抵抗路面干扰能力,本文采用固定把持转向盘方法。假定转向盘固定,驾驶员的转向手力是:

如果不考虑电动机的动态特性,采用电流比例控制方法,电动机电流为:

式中,λ为助力增益。
根据式(1)~(4)、式(7)~(9)得:

3 EPS系统参数优化
3.1 EPS优化模型
为了提高系统转向路感的性能,在系统初步设计时用自适应遗传算法对路感参数进行优化。系统设计参数变量为:x=[ks,Jm,G1]T。
考虑到路面信息能够较多地传递到驾驶员手上,就要求转向路感的频域能量在一定的频率范围内均值越大越好。为此建立如下目标函数表达式:

目标函数表示了路感在路面信息的有效频率范围[0,ω]的频域能量平均值,ω是路面信号中有用信号的最大频率值。本文优化设计中取值为40 Hz。当目标函数最大时,转向路感的传递特性最好。
约束条件为:EPS的基本目标是在汽车安全行驶的前提下,提高汽车转向的轻便性,同时保证有一定的回正力矩,以改善操纵的稳定性。因此扭矩传感器刚度、电动机转动惯量、助力机构传动比还必须满足操稳性要求。
3.2 自适应遗传算法设计
遗传算法的基本思想是将求解问题转化成由个体组成的演化群体,并对该群体进行一系列遗传操作,直到求得最有解。遗传算法包括3个基本遗传算子:选择、交叉和变异。自适应遗传算法能使交叉概率Pc和变异概率Pm随群体的适应度自动更改。当种群个体的适应度趋于一致或者局部最优,Pm和Pc应增加,为了跳出局部最优;当群体适应度分散,Pm和Pc应减少。为了优良个体的生存,低于平均适应值的个体,Pm和Pc应选择较大的值,为了增加新个体产生的速度,从而能保护优良个体的有效模型,当全局最优点在局部极值点附近时,此方法的搜索速度也较高。因此,自适应遗传算法能提供相对某个解的最优交叉概率Pc和变异概率Pm[5-6]。
1)初始群体的生成,本文采用实数编码并随机生成种群规模为90的初始群体。如果系统中有M个参数需要优化,则以这M个参数为分量构成M维行向量,并将它作为个体的编码,即Q=|q1,q2…qM|,式中Q表示一个个体;qi表示在第i个参数的空间内随机产生的一个分量。
2)适应度函数的计算,适应度函数的设计应避免在进化的开始因少数性能较优的个体适应度过大而淹没其他个体,使寻优过程缓慢或出现未成熟收敛。为获得满意的动态特性,并防止产生超调,采用误差绝对值、误差和误差变化率的加权作为第k个采样时间,第i个个体的参数选择最小目标函数。

公式中,errori(i)为第k个采样时间第i个个体的位置跟踪误差,de(i)为第i个个体的位置跟踪误差变化率。为了避免超调,本文采用了惩罚功能,即一旦产生超调,将超调量作为最优指标的一项,此时最优指标为:

遗传算法采用适应度函数进行选择计算,必须进行目标函数的转换,此时适应度函数为

3)交叉、变异操作,交叉概率pc=0.95,变异概率为

即自适应度越大,变异概率越小。
3.3 基于自适应遗传算法的参数优化结果
利用Matlab遗传算法与直接搜索的工具箱,并调用函数[x fval]=ga(@fitnessfun,nvars,options),编写适应度函数,设计变量个数和其他设置选项:种群类型、种群尺度、初始种群、复制、交叉、变异、优化设计变量的初始值、上下限赋值等。适应度函数会影响到遗传算法的收敛速度以及能否找到最优解。
考虑到车速和助力增益是变化的,助力增益是随车速变化的,因此在优化设计前对助力增益和车速进行设定。此优化过程中取λ=40,v=45 m/s。运行遗传算法优化路感参数的结果为:Jm,ks,G1的值分别为0.000 4 kg/m2,51.964 m/rad,25.64。由于减速机构传动比为整数,所以其值取为26。优化前后对应的Bode图如图2所示。

图2 优化前后转向路感的Bode图Fig.2 Before and after optimization Bode plots of steering feel
由图2可知,优化后的转向路感较优化前带宽增加且相位延迟减小,表明基于遗传算法的EPS系统参数优化可以有效地提高系统的操稳性和转向路感,为EPS系统的参数化设计提供了理论基础。
根据上文对电动助力转向系统的路感模型建立和分析控制器设计的基本思想,采用Matlab语言编写自适应遗传算法优化程序[7]。设采样时间为0.001 s,输入信号为阶跃信号。输出阶跃响应曲线如图3所示。
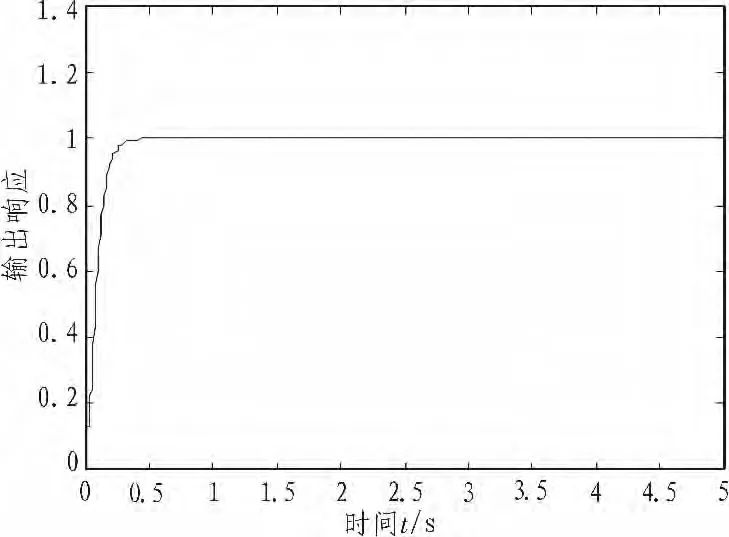
图3 转向路感的阶跃响应曲线Fig.3 Step response curve of steering feel
由图3可知,基于自适应遗传算法优化控制器参数的阶跃响应曲线超调量明显降低,在0.4 s左右就达到稳定值,从而使驾驶员获得比较好的转向路感。
4 结论
电动助力转向系统可以良好地调和转向轻便性和路感这一矛盾,在不同的汽车行驶条件下,可以有针对性地突出路感或者转向轻便性的要求。另外,为保证电动助力转向系统具有较好的通用性,通过遗传算法优化路感参数和控制器参数,有效地提高了系统的转向路感。可以满足不同车型和不同用户实际的需要。
[1] Ijiri W,Tsutsul T.Technical trends of electric power steering system[J].KOYO Engineering Journal,2003,16(2):27-31.
[2] Ji-Hoon Kim,Jae-Bok Song.Control logic for an electric power steering system using assist motor[J].Mechatronics,2002,12(5):447-459.
[3] 吴锋,杨志家,姚栋伟,等.电动助力转向系统控制策略的研究[J].汽车工程,2006,28(8):25-27.WU Feng,YANG Zhi-jia,YAO Dong-wei,et al.Study on the control strategy of electric power steering system[J].Automotive Engineering,2006,28(8):25-27.
[4] 叶耿,杨家军,刘照,等.汽车电动式动力转向系统转向路感研究[J].华中科技大学学报,2002,30(2):24-26.YE-geng,YANG Jia-jun,LIU Zhao,et al.Study on the steering feel of electric power steering system of automobile[J].Huazhong Science University,2002,30(2):24-26.
[5] 黄永青,梁昌勇,张祥德,等.一种小种群自适应遗传算法研究[J].系统工程理论与实践,2005,15(2):92-97.HUANG Yong-qing,LIANG Chang-yong,ZHANG Xiang-de,et al.Research on adaptive genetic algorithm with small population[J].Systems Engineering Theory and Practice,2005,15(2):92-97.
[6] 陈无畏,王妍,王启瑞,等.汽车电动助力转向系统的自适应LQG控制[J].机械工程学报,2005,41(12):167-172.CHEN Wu-wei,WANG Yan,WANG Qi-rui,et al.Adaptive LQG control for the electric power steering system of an automobile[J].Mechanical Engineering,2005,41(12):167-172.
[7] 刘金琨.先进PID控制及其MATLAB仿真[M].北京:电子工业出版社,2003.