白光干涉自动测量砂轮表面时干涉区间的确定
2014-03-26崔长彩叶瑞芳黄春棋
张 遨,崔长彩,余 卿,叶瑞芳,黄 辉,黄春棋
(华侨大学机电及自动化学院,福建厦门 361021)
0 引言
白光干涉法作为一种非接触式的测量方法,在表面形貌的测量方面得到了广泛的应用[1-3]。在白光干涉测量法中,手动调焦较繁琐,调节速度、操作人员的反应快慢等因素都会影响干涉条纹的搜索效率。如果可以实现自动对焦,就可以明显提高效率。
Chang[4]和Paul等[5]在系统中安装了光电检测器,配合运算电路通过判断电压的变化来搜索干涉条纹;Wang和Chen[6]利用梯度算子得出一系列图像的集中指数曲线并根据曲线的陡峭程度来确定对焦位置,但是在采样间隔较小的情况下并不适用;王生怀[7]则先使压电陶瓷微位移器伸展到其最大输出位移的一半,然后通过电机和CCD定位到图像灰度值归一化方差最大的点,最后撤掉压电陶瓷上加载的电压,此时被测工件相对物镜的位置就记为初始测量位置,但是这个初始位置不一定存在条纹;吴志顺等[8]依据灰度方差的变化来识别条纹,并给出了确定变化的阈值。这种方法速度快,但是识别出的干涉范围并不精确。虽然以上的这些方法都可以用来实现白光干涉仪的自动搜索,但是对于表面形貌过于复杂的被测物例如砂轮表面的自动扫描来说,其扫描效果并不理想。
文中提出了一种新的确定干涉区域的方法,在性能上与传统算法进行了对比,并应用于白光干涉仪系统,实验验证了方法的可行性。
1 常用的评价方法
1.1灰度方差法
清晰对焦的图像应有比模糊图像更大的灰级差异[9-10]。同样,当干涉条纹出现时,图像的灰度值差异会发生非常明显的变化,根据这一特点利用图像灰度值的方差变化来判断是否发生干涉。
对于一张M×N像素的灰度图像,g(x,y)为图像中点(x,y)处的灰度值,定义灰度方差评价函数为:
(1)
式中:μ为平均灰度值。
(2)
对同一测量对象所采集到的图像,干涉条纹越多,其标准差φ越大。
1.2 Sobel算子梯度法
在图像处理中,Sobel算子常用来提取图像边缘信息[11]。对于良好对焦的图像,有更尖锐边缘的图像,应具有更大的梯度函数值[12-13]。对于含有干涉条纹的图像,条纹使图像含有更多的边缘信息。所以可以利用Sobel算子计算出图像的梯度和来判断是否发生干涉。
对于一张M×N像素的灰度图像,其梯度平方和γ为:
(3)
式中Gx,Gy分别为该图像在点(x,y)处沿水平方向和垂直方向的梯度。
1.3 常用方法存在的问题
基于图像处理的常用方法大都是提出一个用来评价整幅图像的参数,然后根据参数的变化曲线来判断是否发生干涉。通常要求在一定范围内具有无偏性、唯一性、灵敏度高等特点[14-15]。但是对于较复杂的表面,如金属结合剂金刚石砂轮表面,不同区域的反光特性不一致,所产生的干涉条纹亮度也有很大区别;金刚石颗粒和大面积金属结合剂干涉条纹往往在时间上并不连续;另外对于这些传统的针对整幅图像进行评价的参数,当局部小区域开始发生干涉时,对参数的整体变化趋势影响不大,这时,若再仅根据参数曲线的陡峭度来判断是否发生干涉就会出现干涉条纹发生区域搜索不准的问题。
2 基于帧差法确定干涉发生区域
为了解决常用方法存在的问题,文中引入帧差法来确定干涉发生区域。在白光干涉仪所采集到的连续一系列图像中选取相邻2张图像In,In-1,对其像素灰度值进行相减得到新的图像Cn,分析Cn中像素灰度的变化。这时有3种情况分别见图1、图2、图3。

(a)无干涉条纹图像In-1
(b)无干涉条纹图像In

(c)In与In-1 相减后所得图像Cn图1 相邻2张图像都无干涉条纹

(a)无干涉条纹图像In-1
(b)存在干涉条纹图像In
(c)In与In-1 相减后所得图像Cn图2 相邻两张图像有1张存在干涉条纹
可以看出,当In,In-1中不存在干涉条纹时,图像Cn中只含有噪声,当In,In-1至少有1张图像存在干涉条纹时,图像Cn有灰度值远大于噪声的像素点。
根据这一现象,提出算法如下:
首先计算Cn:

(a)存在干涉条纹图像In-1
(b)存在干涉条纹图像In

(c)In与In-1 相减后所得图像Cn图3 相邻2张图像都存在干涉条纹
(4)
式中cn(x,y),in(x,y)和in-1(x,y)分别为图像Cn、图像In和In-1在(x,y)处的灰度值。
这样采集的L幅灰度图像经过相减后变为L-1幅灰度图像。定义sumn为Cn中灰度不为零的像素数量。对每一幅Cn(n=1,2……,L-1)计算其灰度不为零像素点的灰度平均值avegreyn和灰度最大值maxgreyn:
(5)
maxgreyn=max(cn(x,y))
(6)
定义阈值T:
(7)
kn=avegreyn+maxgreyn
(8)
做出maxgreyn随图像数n的变化曲线,以T为阈值对曲线进行水平切割,就得到所需要的扫描区域,如图4所示。

图4 计算得出的扫描区域
3 算法性能比较
对采集到的数据分别用灰度方差法,Sobel算子梯度法和文中提出的算法进行分析并做出归一化曲线进行比较,结果如图5所示。
从图5可以看出,灰度方差法曲线对干涉条纹最不敏感,Sobel算子法在发生大面积干涉时虽然具有较大的陡峭度,但是会忽略掉局部小区域的干涉条纹。由maxgrey变化曲线和水平线T所截得的区域即是利用文中方法得到的干涉区域,在此区域内都存在被灰度方差法和Sobel算子法所忽略的较大波动,如图5(a)中第125张图像到第131张图像之间,图5(b)中第219张图像到第227张图像之间,图5(c)中第161张图到底175张图像之间的波动,这些正是局部小区域发生干涉的位置,说明该方法对局部细的干涉比较敏感,计算出的干涉发生区域更加准确。

(a)第一组金刚石砂轮表面数据

(b)第二组金刚石砂轮表面数据

(c) 第三组金刚石砂轮表面数据图5 3种算法干涉条纹识别能力比较
3种算法运行时间如表1所示。
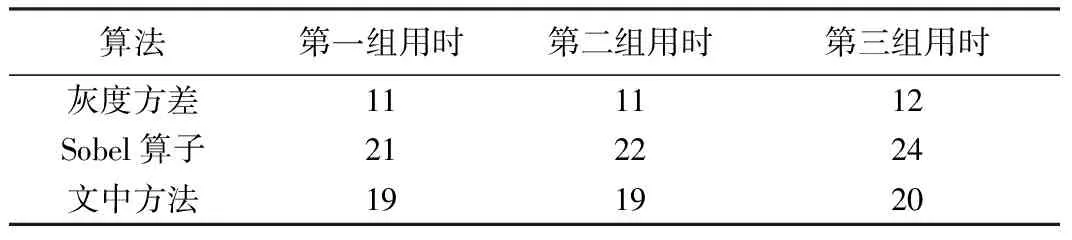
表1 3种算法运算时间 s
从表1中可以看出灰度方差法运算速度最快,其次是文中提出的方法,Sobel算法速度最慢。
4 系统实现
文中采用的系统结构示意图如图6所示,其中CCD用来采集图像,步进电机带动镜筒实现干涉条纹区间搜索,压电陶瓷微位移器带动镜筒实现三维表面恢复的精密垂直扫描,光栅用来记录位移信息。
图7为采用的系统实物图,垂直方向光栅最大测量范围为10 mm,其测量精度为0.1 μm.单轴驱动器采用LX2602CP,导程为4 mm.步进电机选择两相步进电机DM4250E,步进驱动器为DMD402A.细分数选定为50,即10 000步数/转。所以单脉冲步长为0.4 μm.压电陶瓷微位移器选择XP-620.10L,其开环行程范围为15 μm,分辨率为0.3 nm.干涉显微镜采用20倍Mirau型,焦距10 mm.

图6 系统结构示意图
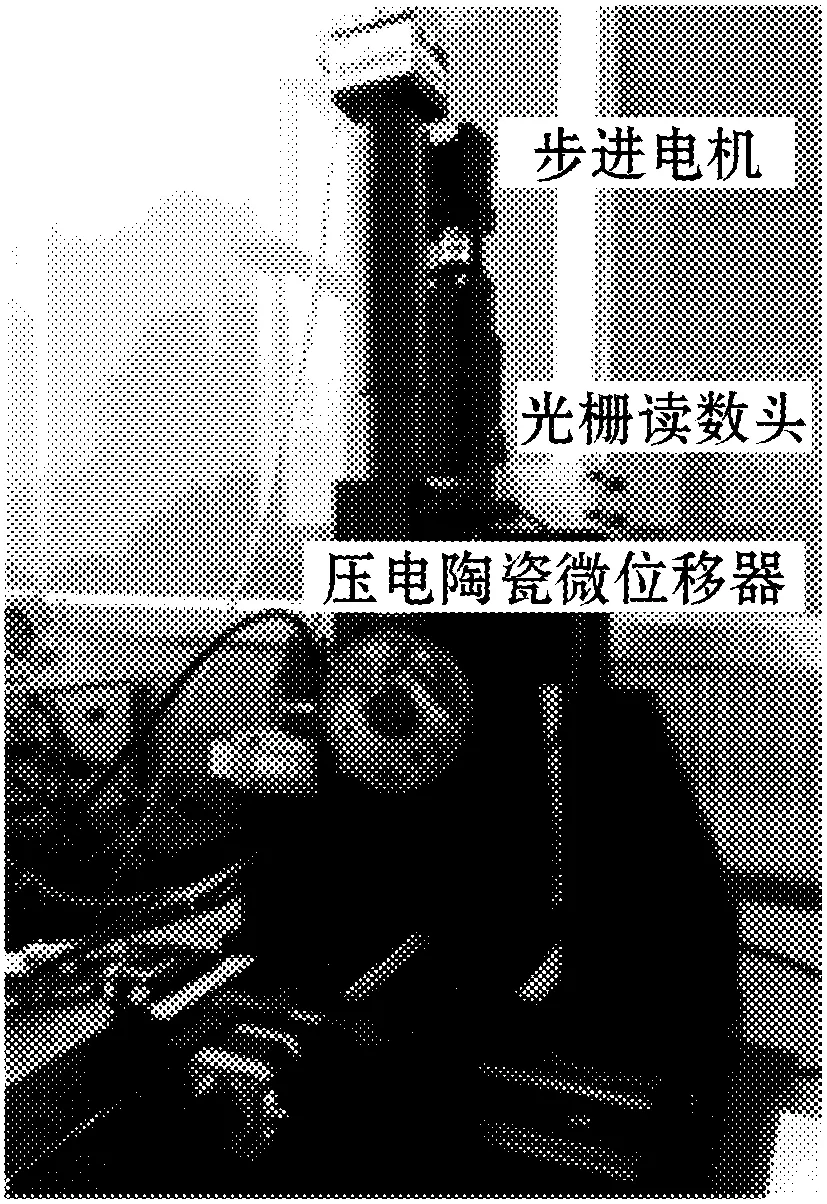
图7 系统结构实物图
测量时,首先设定一个较大的运动范围,在这个范围内,步进电机带动干涉显微镜进行向下运动,CCD保存图像并把由光栅测得的位置信息记录在图像的文件名中。当步进电机运行超出运动范围时,电机停止运动,CCD停止采集。计算机根据采集到的图像计算出干涉范围后,电机向上进行直至进入干涉区域。这时压电陶瓷微位移器开始加载电压使干涉显微镜向上产生微位移并开始采集图像。当干涉区域采集结束后,PZT电压清零,一个采集流程结束,这个采集过程及其完整流程图如图8所示。

图8 系统采集流程图
5 系统测试结果及分析
对砂轮表面进行15次自动扫描,垂直扫描方向的极限搜索范围设定为100 μm,记录扫描每次扫描时间如图9所示。
实验证明,运用该算法,系统可以在100 s内完成在100 μm范围内快速计算出干涉区间,PZT带动CCD进行微位移并采集图像这2个过程。其中,如果计算得到的干涉区间大于压电陶瓷最大行程15 μm,则需要步进电机与PZT相互接力运动。

(a)15次自动扫描消耗的总时间

(b)15次自动扫描中算法消耗的时间图9 采集时间重复测量结果
分析这15组采集到的图像,根据记录的光栅信息求出每次扫描的干涉区间并由此分析系统的重复性,每次采集的干涉区域上限和下限分别见图10和图11。

图10 干涉区域上限
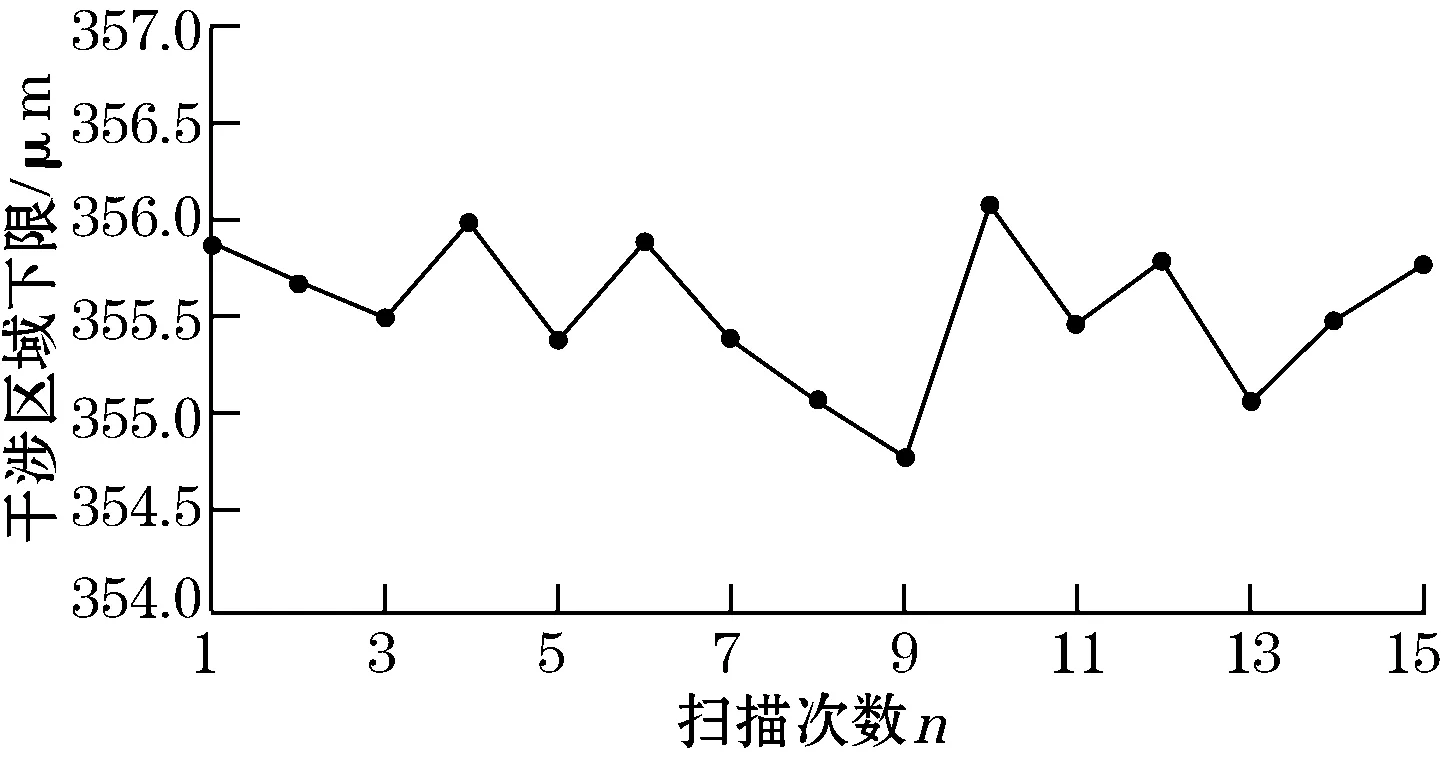
图11 干涉区域下限
通过所得到的数据计算实验标准差来评价测量重复性为:
上极限实验标准差0.28,下极限实验标准差为0.37。
6 结论
(1)文中提出的基于相邻两张图像灰度变化的条纹识别算法对局部条纹的识别更敏感,从而可以更精确搜索出干涉条纹存在的区域,更适用于自动采集类似金属结合剂金刚石砂轮这样表面形貌较复杂的被测对象的干涉条纹。
(2)该算法简单,运行时间短,对100 μm范围进行自动扫描,可在100 s内完成干涉范围的确定和干涉图像的自动采集。且重复性良好。
参考文献:
[1] 邹文栋,黄长辉,欧阳小琴,等.合金韧窝断口微观形貌的扫描白光干涉三维检测重构及 Motif 表征.机械工程学报,2011,47(10):8-13.
[2] 韩文梅,康天合.基于白光干涉泥岩表面形貌试验研究.太原理工大学学报,2013,44(4):475-479.
[3] 刘晨,陈磊,王军,等.利用白光扫描干涉测量表面微观形貌.光电工程,2011,38(1) :71-75.
[4] CHANG M,DEKA J R,CHEN P J,et al.An auto-focusing system for white light microscopic measurement.Fourth International Symposium on Precision Mechanical Measurements,Anhui,2008.
[5] CABER P J,COHEN D K.Effect of detector noise on the positioning accuracy of an autofocus system.Applied optics,1992,31(31):6684-6689.
[6] WANG W C,CHEN J L.Auto-focusing in the scanning white-light interferometer.International Society for Optics and Photonics,Munich,2009.
[7] 王生怀,王淑珍,陈育荣,等.白光干涉表面结构测量仪的优化设计与应用.仪表技术与传感器,2010(2):22-27.
[8] 吴志顺,崔长彩,叶瑞芳,等.基于阈值判定法的白光干涉仪自动扫描技术研究.中国机械工程,2012,23(12):1482-1486.
[9] 冯华君,毛邦福,李奇,等.一种用于数字成像的自动对焦系统.光电工程,2004,31(10):69-72.
[10] 王仁华,沈忙作.自动对焦算法研究.光电工程,2000,27(4) :11-13.
[11] 周贤,姜威.基于图像边缘能量的自动聚焦算法.光学技术,2006,32(2):213-218.
[12] 赵伟,杨明,叶明,等.全自动细胞芯片检测仪中自动聚焦系统的研究.电子测量与仪器学报,2011,25(8):728-733.
[13] 王虎.自动对焦原理及方法,科技信息,2008(13):38.
[14] 孙立宁,陈立国,荣伟彬.微操作机器人显微视觉系统自动调焦的实现.仪器仪表学报,2002,23(22):665-674.
[15] 王超,蒋远大,翟光杰,等.基于数字图像处理的自控显微镜聚焦算法研究.仪器仪表学报,2009,30(6):1290-1294.